
一种基于结构光条纹投影的微小物体测量系统
2019-12-13 02:14史耀群邓林嘉王朝旭伏燕军钟可君管炳良
应用光学 2019年6期
史耀群,邓林嘉,王朝旭,伏燕军,钟可君,管炳良
(1.南昌航空大学 无损检测技术教育部重点实验室,江西 南昌 330063;2.九江如洋精密科技有限公司,江西 九江 332000)
引言
目前,微小物体表面三维形貌测量因其独特的工程价值在众多领域具有广泛的应用前景,例如缺陷检测、三维测量、虚拟现实、机器视觉、医疗检测等[1-4]。常见的微小物体表面三维测量技术包括傅里叶变换轮廓术[1]、干涉测量轮廓术[2]、条纹投影轮廓术[3]、调制度测量轮廓术[4]等。随着机械加工、微电子、材料分析等新技术的快速发展,越来越多与制造业相关的行业对微小物体表面的三维轮廓信息产生了需求。
近年来,国内外众多学者针对微小物体表面三维形貌的测量方法和测量系统展开了研究。Vargas J等人[5]为了解决具有高动态成像范围的微小芯片测量的问题,调整相机的曝光时间并利用格雷码加相移完成微小芯片的三维测量,但是该方法由于需要调整曝光时间且投影的条纹图较多导致测量速度无法满足工业检测。Anand A等人[6]提出了一种基于深紫外高分辨率的定量相位显微成像方法,也提出了相应的相位恢复方法。李阿蒙等人[7]提出了一种基于立体显微镜和条纹投影轮廓术的定量三维显微系统,分辨率达到1 μm,但由于视场限制,每次只能测量一部分,需要多次测量。Van der Jeught.S等人[8]提出了一种实时显微相移轮廓术,将投影仪和相机集成到体式显微镜的2个独立的光学通道中,显微镜的放大功能会减小相机的视场,同时需要超高速帧率的相机用于实时测量,目前相机采集帧率大多无法满足要求。於燕琴等人[9]搭建了一套基于数字条纹投影和立体显微镜的三维小视场测量系统,系统的集成度不高无法满足实时测量。艾佳等人[10]研发了一种基于远心镜头和三频外差的小视场三维测量系统,系统精度为10 μm,但由于采用了三频外差的方法导致测量速度较慢。胡岩等人[11]提出了一种基于Greenough体视显微镜的三维显微表面测量系统,在消除透镜畸变的情况下,实现测量系统的高精度标定。孔玮琦等人[12]提出了一种基于远心镜头的标定技术,并利用相机的多重曝光进行高动态范围测量,但是还无法实现实时测量。
根据上述国内外研究现状可知,大部分针对微小物体表面三维形貌的测量方法因受限于测量范围、测量速度、测量精度等因素,都不能很好地满足工业测量需求。条纹投影轮廓术因其测量无损伤、测量范围大、测量精度高、测量速度快等优点,备受国内外研究学者关注和研究。
本文采用基于数字条纹投影的三步相移法[13],在相位展开时采用可靠路径跟踪相位展开算法,仅需3幅相移条纹图,即可实现截断相位的提取和连续相位的恢复,能够在保证较高测量精度和较大测量范围的条件下,提升测量速度。本文设计实现的微小物体三维形貌测量系统,结构简单,利用立体显微镜将Light Crafter 4500投影组件投影的正弦条纹进行缩小,然后投射到微小物体表面,因立体显微镜光学成像畸变小、能连续变倍,保证了缩小后投影到微小物体表面的正弦条纹质量,搭配与CCD相机共同采集变形条纹图的远心镜头,因其大景深、低畸变、无透视误差,确保了采集的变形条纹图质量,经过三步相移算法和可靠路径跟踪相位展开算法处理可以获取相应的连续相位,再由相位-高度转换关系,即可实现对静态微小物体表面轮廓的三维测量与重建。
1 条纹投影轮廓术原理
1.1 三步相移法
三步相移法因其所需要的带条纹的图像幅数少,算法实现简单[13],因此本文采用三步相移法,进行相应的相位提取,其基本原理如下。
通过精确地移动投影的光栅条纹,获得3幅条纹图像,每个条纹图像可以表示为
(1)
式中:a(x,y)为条纹图背景光强;b(x,y)为调制强度函数;φ(x,y)表示光栅条纹上的相位(即连续相位);α是相移长度。在本文中,采用α=120°,此时求解方程(1),可得到截断相位φ(x,y),即:
(2)
获取截断相位后,通过一定的相位解包裹方法,就能恢复连续相位φ(x,y)。
1.2 可靠路径跟踪相位展开算法
本文采用基于可靠路径跟踪的空间相位展开算法,其实质是一种质量图引导的相位展开算法。算法表达式如下[14]:
(3)
基于可靠路径跟踪的空间相位展开算法的具体实现过程如下:
1) 首先,进行简单的相位展开,对获取的截断相位剔除其中相位差值大于2π的分量;
2) 然后,对步骤1)中获取的结果进行二阶差分求取,以便获取用于引导相位展开的质量图;
3) 根据步骤2)中获取的质量图进行引导,对截断相位进行解相位。
由(3)式可知相位展开本质上可看作一个积分过程,因此,若根据连续路径的积分求解,前面任意一点出现误差,误差将会按照相位展开路径进行传播。若根据获得的质量引导图进行导向求解,在进行相位展开时,是从高质量点到低质量点进行相位计算,将会从根本上限制误差传递。
2 测量系统
2.1 立体显微镜工作原理
在本文系统中,要实现微小物体三维形貌测量,需要将条纹图投射到被测物体表面,并将被投影的条纹图缩放。图案缩放单元基于一台立体显微镜,其工作原理[15]如图1所示。
立体显微镜还兼具普通光学显微镜不具备的优点。首先,大景深、大视场以及工作距离大,方便全局观察被测物体。其次,正立成像,便于生物解剖和操作。最后,光线经过两组中间透镜组构成一定的体视角,能形成立体图像,满足光学三角测量法的要求。
2.2 远心镜头成像原理
远心镜头因其具有以下特点:1) 低畸变(通常<1%);2) 大景深;3) 有效景深内,物像倍率固定;4) 竖立成像时,无虚影现象(无透视误差);5) 主光线平行于光轴而成像。
因此,远心镜头能很好地解决透视投影误差问题,这也使得在精密测量领域中越来越广泛地采用远心镜头替代传统镜头,如图2所示为双远心镜头成像原理图。
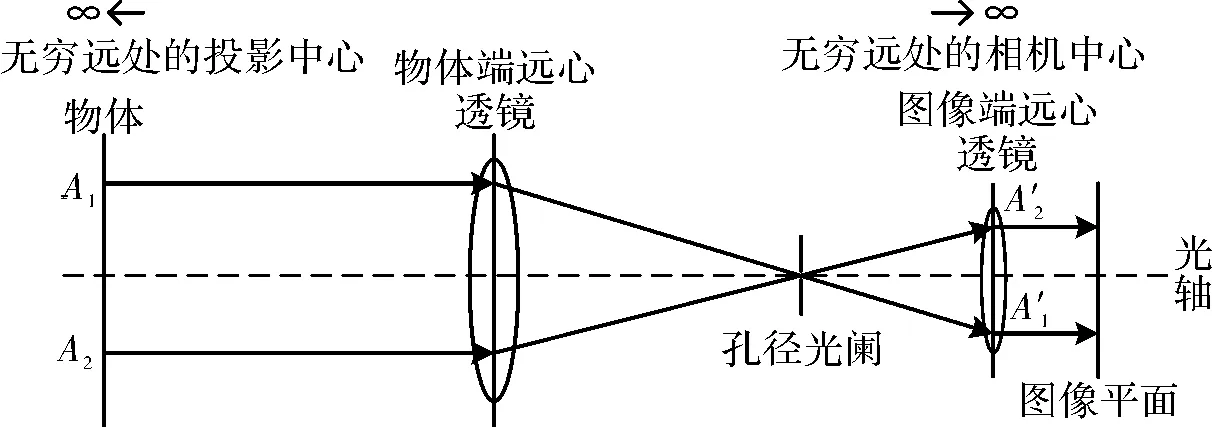
图2 双远心镜头成像原理Fig.2 Imaging principle of dual telecentric lens
2.3 系统结构
如图3所示为微小物体三维形貌测量系统原理图,从图3可以发现,该测量系统基本构成包括:投影仪、缩放单元、CCD摄像机、远心镜头、计算机、图像采集卡。
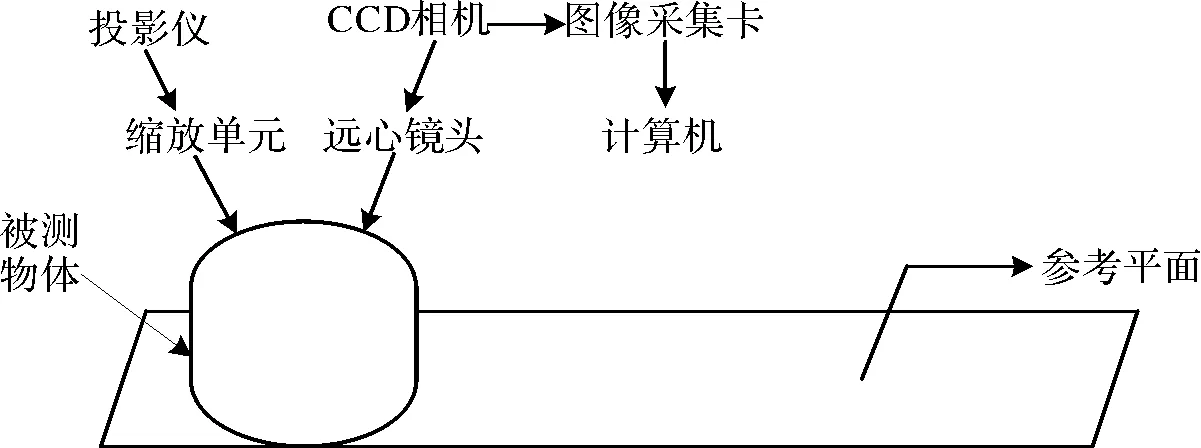
图3 微小物体三维形貌测量系统工作原理Fig.3 Working principle of three-dimensional morphology measurement system for micro-objects
首先,使用计算机自动生成相应的相移光栅条纹图。然后,根据被测对象的材料和表面特征(如颜色、纹理等),使用投影仪通过体视显微镜将相移光栅条纹图依次投影到参考面与被测物体表面,因被测物体表面凹凸不平,被投影的相移光栅条纹图经过物体表面调制、反射后,被带至双远心镜头的CCD相机所拍摄并保存,此时的相移光栅条纹图包含被测物体表面的高度信息。然后,通过三步相移方法求解截断相位,并通过可靠路径跟踪相位展开算法获取连续相位。最终,通过相位-高度映射关系,求取被测物体高度,即可重建物体的三维形状。
3 实验与分析
3.1 系统硬件
基于上述原理,本文搭建了一套适用于测量微小物体三维形貌的测量系统,其测量装置如图4所示。微小物体三维形貌测量系统采用型号为SMZ-168-TL的体视显微镜,投影装置为一款基于DLP4500芯片开发的高速数字投影套件DLP®Light Crafter 4500TM,分辨率为912 pixel ×1 140 pixel,CCD相机为德国Basler AG公司生产的一款acA1600-20gm型相机,分辨率为1 626 pixel×1 236 pixel,远心镜头放大倍率为0.4,景深为5.2 mm。在LightCrafter和体视显微镜中间加装一个偏振片用来调节条纹的亮度,然后依次将相移正弦条纹投影到小视场(1.8 cm×1.6 cm)的物体表面,并使用CCD相机配合远心镜头进行采集,利用三步相移和可靠路径跟踪算法对微小物体的表面三维形貌进行测量与重建。
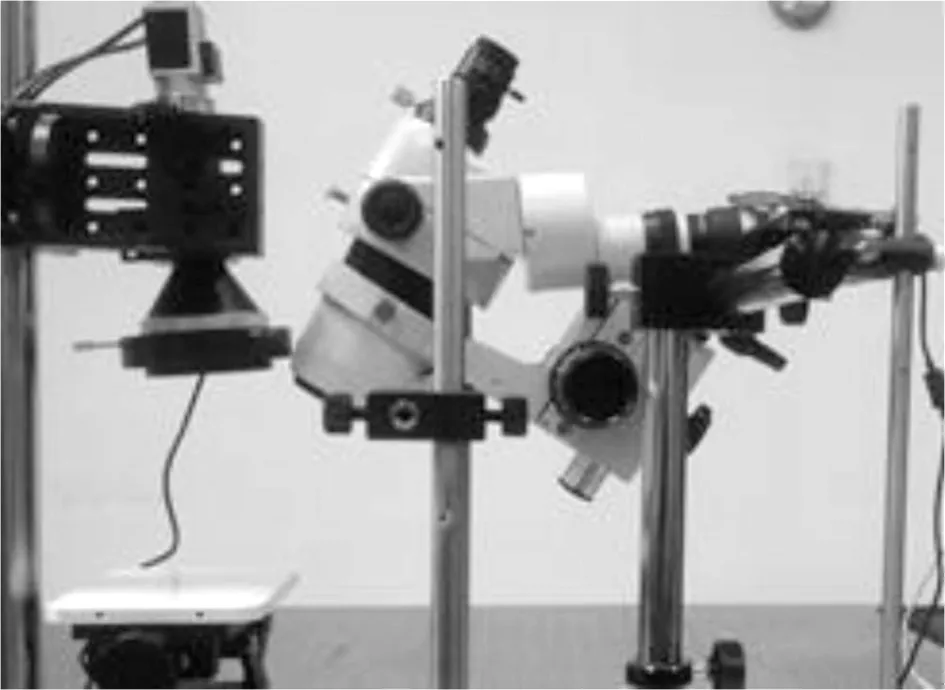
图4 微小物体三维形貌测量系统装置图Fig.4 Micro-objects 3D morphology measurement system
3.2 实验结果及讨论
本文测量的微小物体均为日常生活中常见的银行卡、五角硬币、金属条纹板以及BGA芯片上的微小局部区域,如图5所示为银行卡实物图。投影3幅相同频率的相移条纹图到物体表面,三步相移条纹的投影条纹频率为1/128,相应的三步相移条纹的投影条纹周期数为128。因本文采用横条纹,LightCrafter分辨率为912 pixel×1 140 pixel,单条条纹对应的像素数为912/128 pixel。

图5 银行卡实物图Fig.5 Photo of bank card
采集得到银行卡卡号数字“6000”表面投影条纹频率为1/128的一组变形条纹图,如图6 所示,图像分辨率大小为912 pixels×1 140 pixels。

图6 银行卡卡号数字“6000”的3帧变形相移条纹图Fig.6 3-Frame deformed phase-shifted fringe diagrams of bank card number "6000"
然后利用三步相移法计算获得对应的截断相位图,如图7所示。
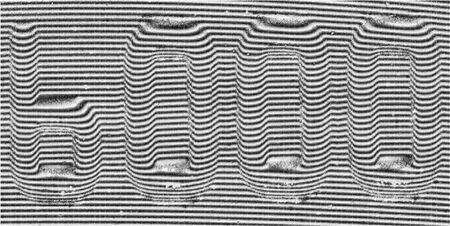
图7 银行卡卡号数字“6000”的截断相位图Fig.7 Truncation phase diagram of bank card number “6000”
根据可靠路径跟踪相位展开算法的原理,针对得到的截断相位进行相位展开计算,可获得连续相位。此时需要将相位转换为高度信息,根据相位高度公式(4),可以得到变化相位和高度之间的关系。
(4)
式中:Δφ是物体和参考平面之间的相位差;高度为h;L为相机和参考平面之间的距离;d为投影仪和相机光心之间的距离;f为投影条纹的频率。将4个精确高度的标准块放在参考平面上,测量每一个标准块的相位差,由于标准块高度和投影条纹频率已知,通过4组数据可以反求出L、d的数据,从而得到相位与高度之间的对应关系,可以对展开相位进行高度映射。最终得到图8所示的银行卡卡号数字“6000”的三维面形重建结果。
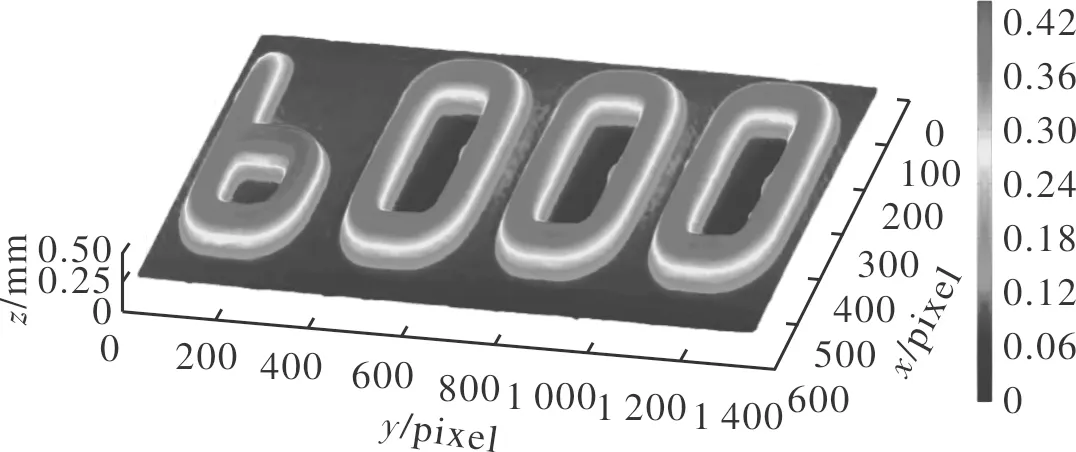
图8 银行卡卡号数字“6000”的三维面形重建结果Fig.8 3D morphology reconstruction result of bank card number “6000”
针对金属条纹板局部区域、BGA芯片引脚部分进行测量,实物图如图9(a)所示,投影的正弦条纹频率不变,采用相同的方法,成功对其进行了三维重建。
用标准块对系统的测量精度进行评估,分别对3个标准块进行测量,并对测量所得的数据求取平均高度,计算所得标准偏差为11 μm,结果如表1所示。

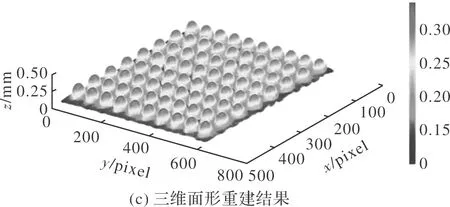
图9 BGA芯片三维面形测量与重建结果Fig.9 3D morphology measurement and reconstruction results of BAG chip
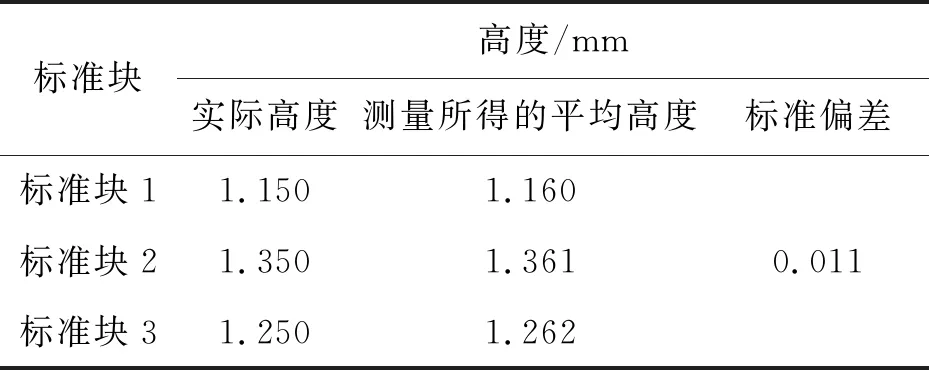
表1 高度误差表Table 1 Chart of height error
评估结果表明,系统精度为11 μm(标准偏差),在保证较高测量精度和较大测量范围的条件下,如果本系统采用更高采集速率的相机和投影速度更快的投影仪可以进一步提高测量速度;若对本文的标定方法做进一步改进可以提高系统的测量精度。
4 结论
微小物体表面三维形貌测量在工业检测、医疗检测、机器人视觉等领域均有着非常重要的作用,未来在其他领域的应用也将得到进一步拓展,而基于结构光的非接触式三维表面测量技术,因其非接触测量、高精度、高速测量等优势,已成为实现三维表面测量的一个重要手段,未来拥有广阔的应用前景。本文基于三步相移结合可靠路径跟踪相位展开算法的原理,利用体视显微镜、远心镜头、数字投影模块和CCD相机,设计并搭建了一套微小物体三维形貌测量系统,视场范围为1.8 cm×1.6 cm。实验结果表明,本文所搭建的测量系统投影相同频率的3幅相移条纹图,根据三步相移结合可靠路径跟踪相位展开算法,仅需3幅条纹图即可实现对微小物体的表面形貌进行重建,测量深度范围为700 μm,系统精度为11 μm,在保证较高测量精度和较大测量范围的条件下,提升系统测量速度。
猜你喜欢
天天爱科学(2022年4期)2022-11-08
数学物理学报(2021年1期)2021-03-29
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
小学科学(学生版)(2019年11期)2019-12-09
小福尔摩斯(2019年2期)2019-09-10
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
