
基于非制冷红外探测技术的军用车辆驾驶员视觉增强系统研究
2019-12-13 02:13董金良季中杰孟祥健徐爱东周智慧
应用光学 2019年6期
卢 伟,董金良,张 平,沈 昱,严 伟,季中杰,孟祥健,林 玲,徐爱东,周智慧
(江苏北方湖光光电有限公司,江苏 无锡 214028)
引言
车载红外夜视技术是在夜间或恶劣天气状况下,利用光电转化技术将车辆前方不可见的红外热辐射转换为人眼可见的红外图像技术[1]。目前常用的车载夜视技术主要有基于近红外的主动红外技术和基于红外热成像的被动红外技术。主动红外夜视技术是利用红外光源不断发出红外辐射照射车辆前方目标,然后通过红外相机接收车辆前方目标反射回来的红外辐射,并最终成像。具有图像清晰、对比度强等特点,但观测距离较近,易受周围环境影响。被动红外技术也叫红外热成像技术是通过红外镜头将车辆前方目标释放的红外辐射聚焦于红外探测器上,经过红外探测器的光电转换及后续电路的信号处理转换成人眼可识别的红外热图[2]。因夜间周围环境温度较低,行人与环境温差较大,所以易于识别,不易受周围环境干扰。
基于非制冷红外探测技术的军用车辆驾驶员视觉增强系统是通过红外热成像技术将视场内的热像内容转换为二维图像,然后通过显示器显示。可有效消除对面会车时的强光刺激,以及侧面炫光对视线的干扰,不会对视野产生任何影响,它可以让驾驶员在黑夜中尤其是雨雪雾霾沙尘等恶劣天气条件下也能够清楚地观察到道路上的车辆行人以及障碍物等,大大提高驾驶员战场环境感知能力。该系统集成了红外光电成像技术、电子稳像技术、图像处理技术、智能报警。
1 国内外研究现状
目前国内外军用车辆的视觉增强系统普遍采用微光夜视技术。随着非制冷红外技术的发展,世界各国都在积极开展基于非制冷红外探测技术的军用车辆驾驶员视觉增强系统的研制,美国、法国等发达国家现已批量装备部队,近十年来国内也有少量采用红外技术的车辆视觉增强系统[3]。
1.1 国外研究现状
美国RAYTHEON公司研制的AN/VAS-5驾驶员视觉增强系统(DVE)(如图1所示)目前已装备于M1“艾布拉姆斯”主战坦克、M2“布雷德利”战车等作战车辆。该驾驶仪采用分辨率为320×240的机芯,10.4英寸、分辨率为640×480的显示器,且主机与显示器一体不可拆卸[4]。

图1 AN/VAS-5驾驶员视觉增强系统Fig.1 AN/VAS-5 Driver vision enhancement system
随着技术的发展,美军对M1“艾布拉姆斯”主战坦克驾驶仪进行了升级。采用美国DRS公司研制的DVE-A驾驶员视觉增强系统(如图2所示),机芯分辨率由320×240升级到640×480,显示器在尺寸保持10.4英寸的情况下分辨率由640×480升级到800×600,为了装配的普适性增加了主机和显示器之间的快速解脱功能。

图2 DVE-A驾驶员视觉增强系统Fig.2 DVE-A Driver vision enhancement system
法国NVTS公司研制的爱国者驾驶员视觉增强系统(Patriot DVE)(如图3所示)目前已装备于陶氏导弹发射车、反地雷伏击车等车辆。该驾驶仪采用分辨率为640×480的机芯,分辨率为800×600的10.4英寸显示器,摄像头和显示器分置安装。
上述国外3款非制冷红外驾驶仪主要指标对比见表1。

图3 爱国者驾驶员视觉增强系统Fig.3 Patriot driver vision enhancement system
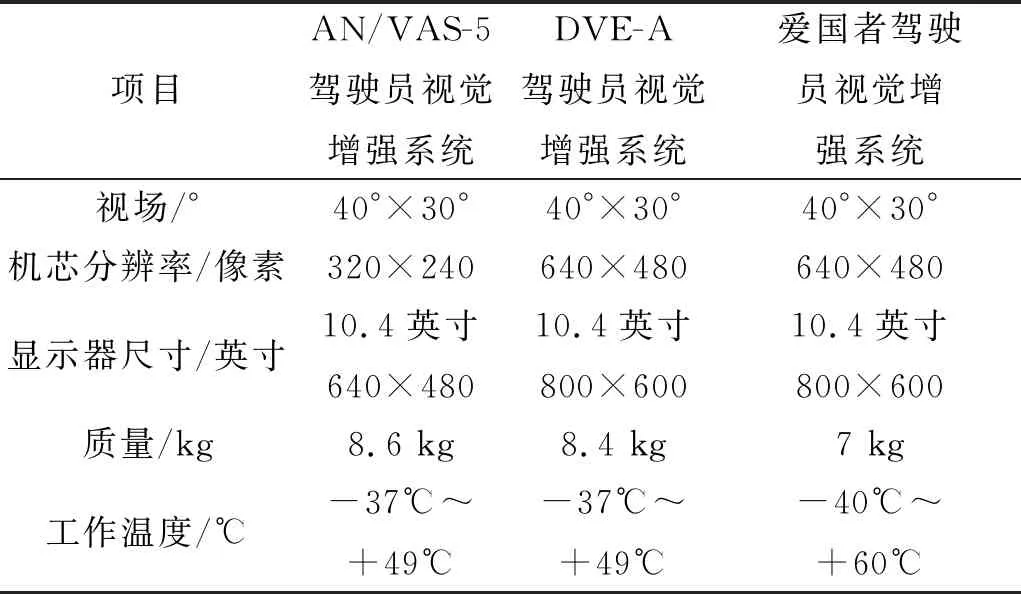
表1 国外3款非制冷红外驾驶仪主要指标表对照表Table 1 Comparison table of main indicators of three uncooled infrared pilots abroad
1.2 国内研究现状
国内军用车辆驾驶员视觉增强系统应用起步较晚[5],但进步较为迅速。经调研,目前国内非制冷红外驾驶装备有**驾驶观察镜、**车辆夜间驾驶仪和**彩色夜间驾驶仪等。
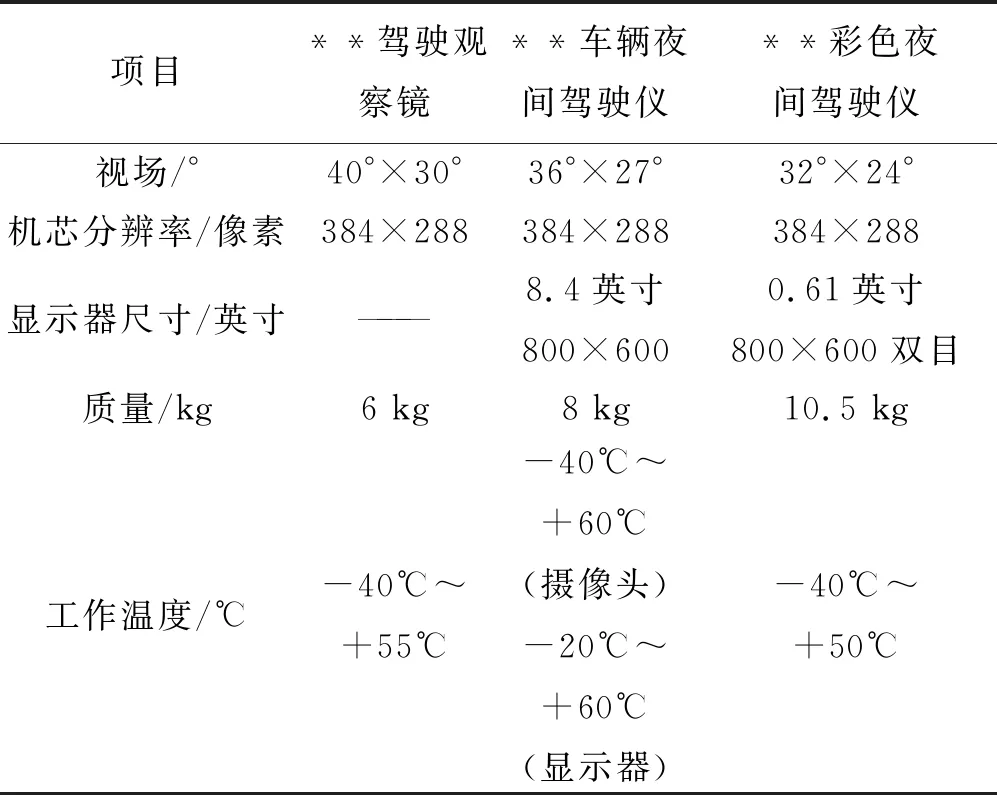
表2 国内非制冷红外驾驶装备部分指标对照表Table 2 Domestic comparison table of part of indicators of uncooled infrared driving equipment
2 系统工作原理
基于非制冷红外探测技术的军用车辆驾驶员视觉增强系统总体方案采用潜望式、模块化设计,为充分利用能量,提高探测能力,系统采用直视型探测方式,即红外物镜和探测器布置在头部部件内,功能模块电路板布置在中间部件,显示控制器布置在下部部件[6]。系统工作原理如图4所示,该系统是一种集光、机、电于一体的红外转换系统,由红外光学系统、红外探测器、信号处理电路和显示设备4个基本模块组成[7]。目标和景物的红外辐射经大气传输至红外光学系统,经红外光学系统接收并聚焦在非制冷红外探测器的焦平面上,红外探测器内的红外光敏材料与内部读出电路响应主控电路的驱动的时序/数字视频数据流进入主处理电子组件进行红外数字图像视频图像处理。处理后的数字视频图像经视频D/A转换并与行场同步信号编码形成数字视频输出,送往显示设备显示[8]。期间通过串口实现系统间的通信,控制通讯模块发出的指令经内部主电路的处理器和软件解码相应系统指令,实现对系统功能的操控。

图4 系统工作原理图Fig.4 System working principle diagram
3 系统设计与实现
3.1 系统设计
系统按照功能划分为:电源管理模块、红外探测器模块、信号处理模块、图像处理模块、电子稳像模块、行人识别模块、录像模块、控制模块、显示模块,各功能模块相对独立,系统电气框图如图5所示。
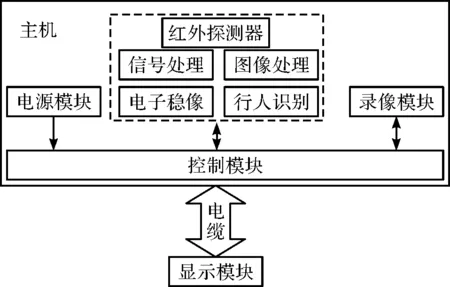
图5 系统电气框图Fig.5 System electrical block diagram
3.1.1 信号处理模块
信号处理板将红外探测器输出的双路模拟差分信号经模数转换器转换为数字信号,传送至FPGA进行数据处理[9]。信号处理板包含TEC控制模块、环温检测模块。
3.1.2 图像处理模块
图像处理板实现红外信号数字化采集、图像非均匀性校正、坏点剔除、自动调光等图像信息综合处理功能,保证图像质量清晰、稳定[10],且动目标无明显停顿和滞后现象。采用FPGA硬件平台实现智能型图像处理算法,极大地提高图像质量及系统灵敏度,图像处理模块包含有如下算法:
自适应非均匀性校正算法:极大降低打快门频率,降低功耗,有效消除红外锅盖效应,保证图像稳定性效果。自适应非均匀性校正算法效果对比图如图6所示。
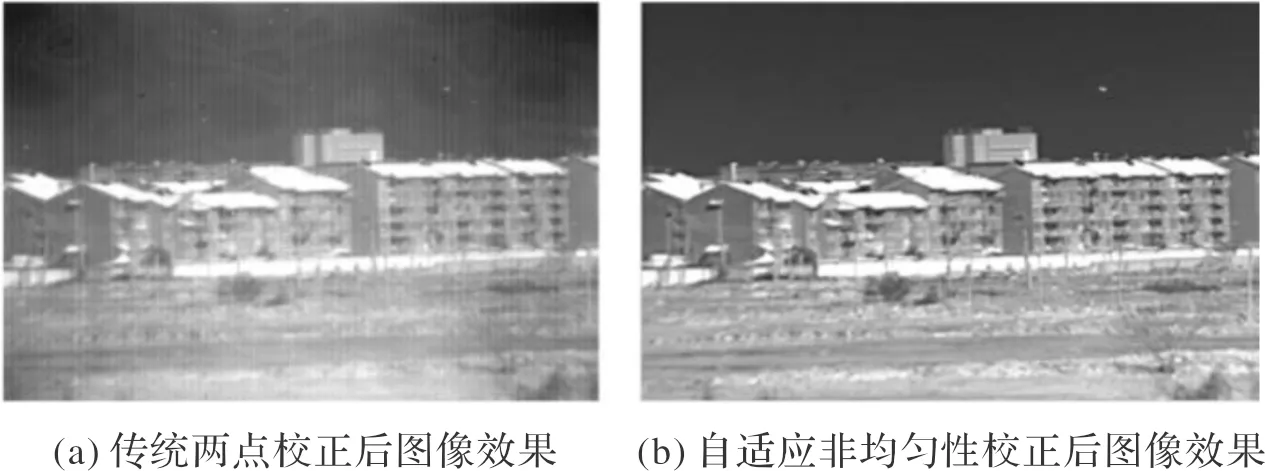
图6 自适应非均匀性校正算法效果对比图Fig.6 Effect comparison chart of adaptive non-uniformity correction algorithm
自适应混合去噪算法:去除噪声的同时有效地保护图像的细节信息[11],提升机芯能力。自适应混合去噪算法效果对比图如图7所示。

图7 自适应混合去噪算法效果对比图Fig.7 Effect comparison chart of adaptive hybrid denoising algorithm
宽动态处理算法:分区域非线性处理,保留高动态范围图像中目标的细节信息[12](包括暗、亮区域)。宽动态处理算法效果对比图如图8所示。
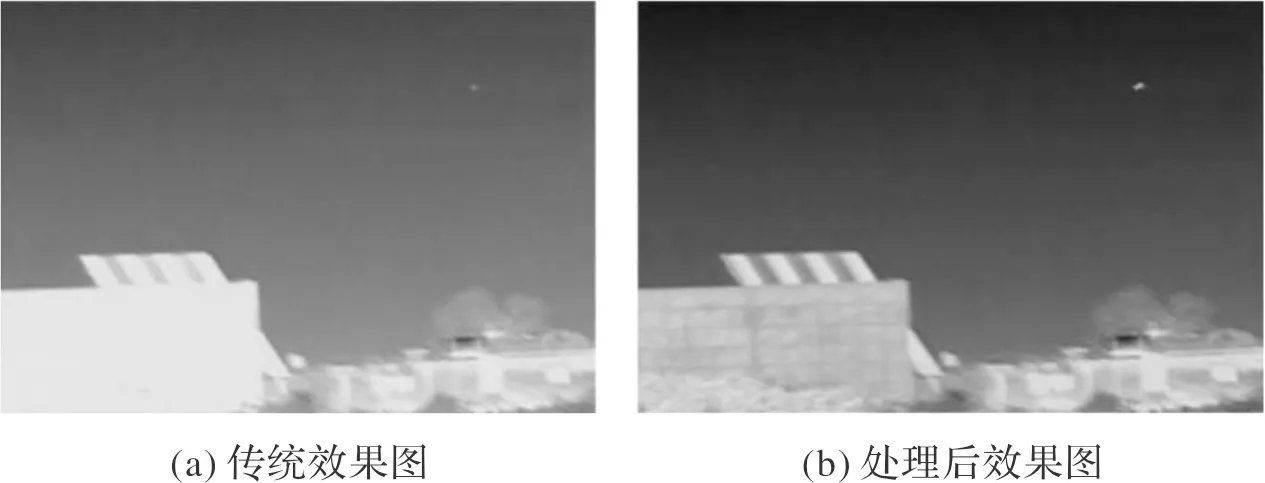
图8 宽动态处理算法效果对比图Fig.8 Effect comparison chart of wide dynamic processing algorithm
3.1.3 电子稳像模块
采用基于图像特征点匹配的算法,实现画面的防抖功能,增强在颠簸路面观察图像的稳定性,提高驾驶员的舒适度。电子稳像主要由运动矢量估计和运动补偿两部分组成。景物和摄像系统之间的相对运动矢量是由运动检测来确定的;运动估计系统就是通过不同的算法对图像进行处理,估算出图像序列的运动偏移[13]。运动补偿则是通过运动决定单元提供的运动参数直接利用数字图像处理的方法使图像上的像素按被检测出的运动偏移反方向做等量移动,实现图像的行、列序重组,达到第二帧输出图像与第一帧输出图像重合,从而实现图像序列的稳定。电子稳像系统的结构图如图9所示。
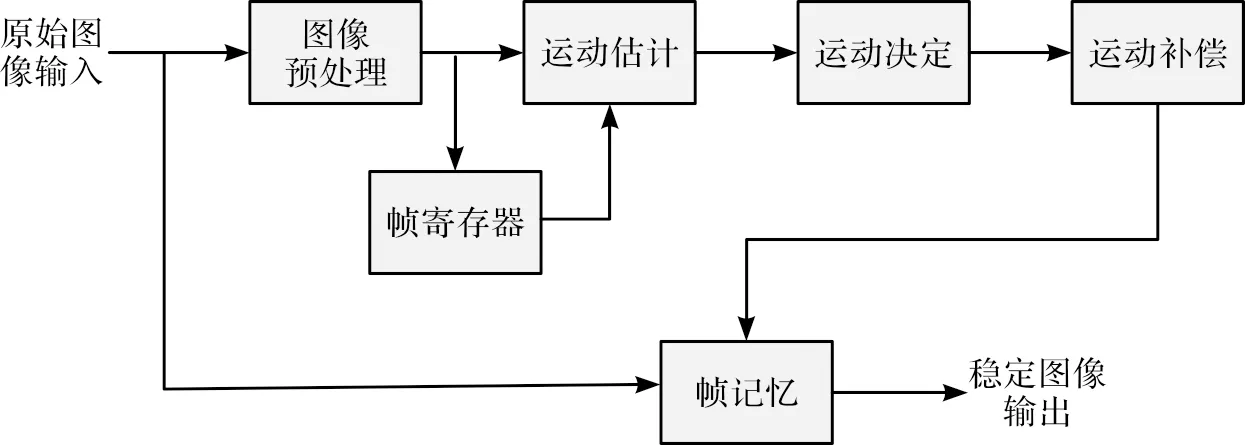
图9 电子稳像系统结构图Fig.9 Electronic image stabilization system structure
3.1.4 行人识别模块
红外视频信号输送至行人识别模块,进行红外图像分割、特征提取、模板匹配、分类判别等操作,对红外图像中检测到的行人及其他物体。行人识别效果图如图10所示[14]。

图10 行人识别效果图Fig.10 Pedestrian recognition effect chart
3.1.5 录像模块
录像板接收主控板的控制信号后,通过DSP将传送过来的数字图像信号进行编码,然后存储在存储芯片中。存储空间不足20%时设计有空间不足提醒,如用户无删除操作则自动覆盖最先录制的视频。
3.1.6 控制模块
主控板主要实现机芯数字图像菜单叠加、车辆示宽线和道路距离标识叠加、视频存储模块的控制、主机与屏之间的通信以及主机对外通信。主控板包含FPGA模块、串口通信模块、数字视频输出接口、通信接口。
3.2 系统实现指标及效果验证
3.2.1 系统主要指标
系统主要指标如表3所示。
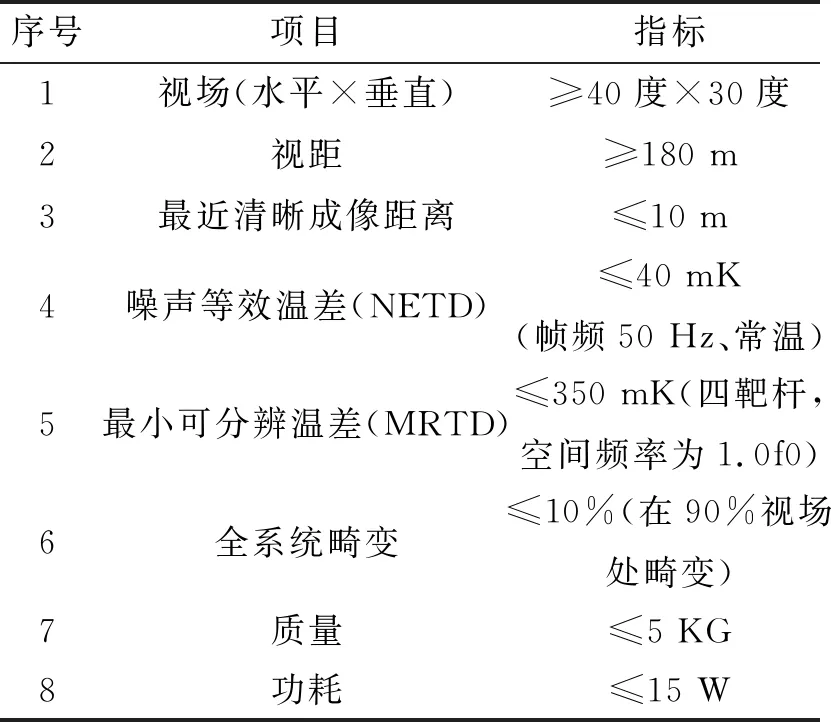
表3 系统主要指标表Table 3 Main indicators of system
3.2.2 效果验证
a) 通过导热与隔热设计,将发热体电源部分布置在壳体底部,并涂抹导热硅脂,与其他电路板分体放置,系统局部热仿真如图11所示,发热源远离非制冷红外焦平面探测器,尽量减小探测器处热量堆积,保证红外图像质量。系统局部机械应力仿真如图12所示,采用局部加强设计,保证系统强度,采用镂空、薄壁等方法,并选用铝合金等轻质金属,整机重量轻、体积小。
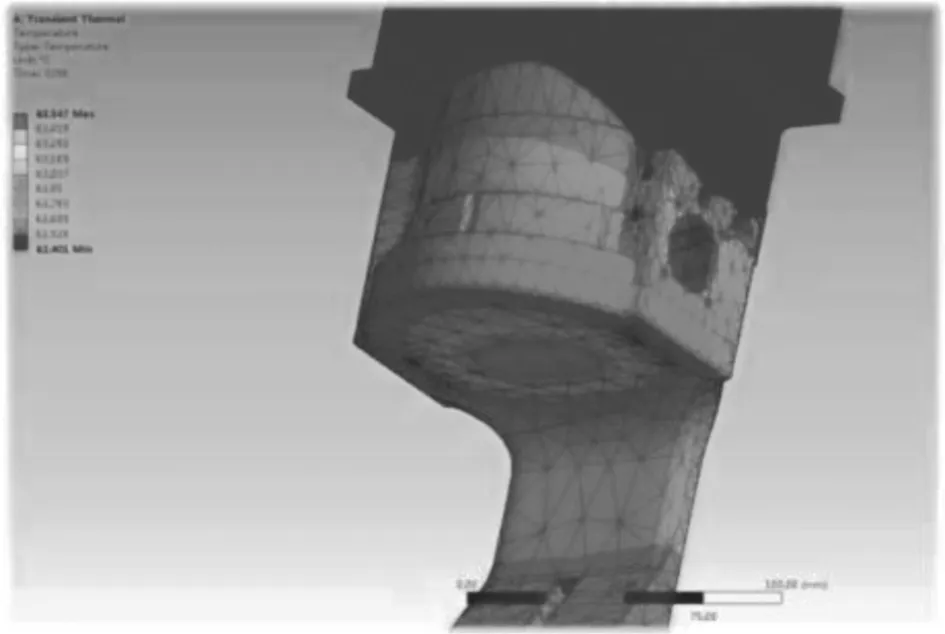
图11 系统局部热仿真图Fig.11 System local thermal simulation diagram
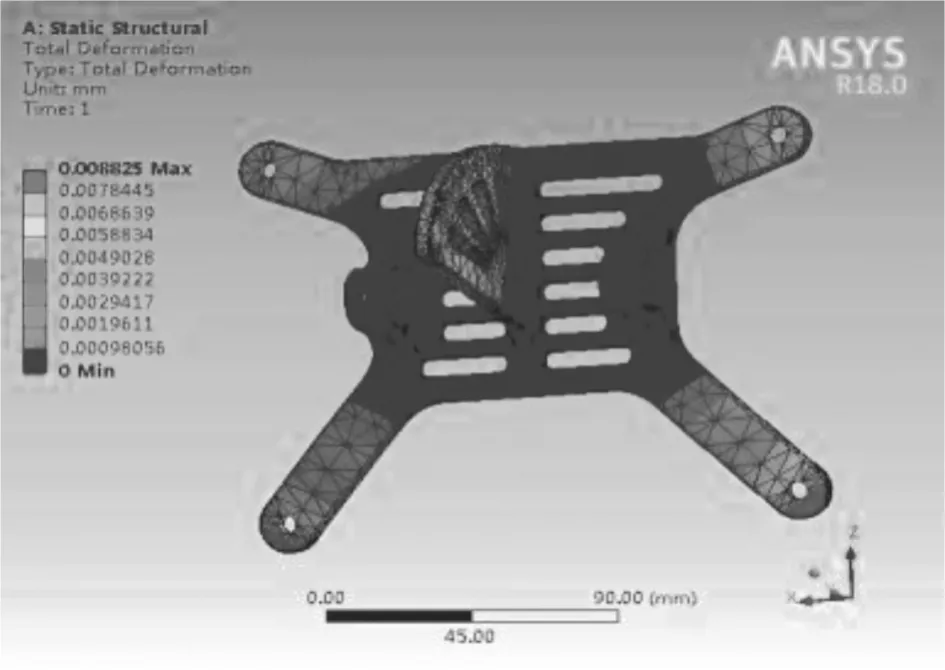
图12 系统局部机械应力仿真图Fig.12 System local mechanical stress simulation diagram
b) 驾驶员视觉增强系统夜间效果如图13所示。

图13 系统夜间效果对比图Fig.13 System night effect comparison chart
c) 驾驶员视觉增强系统雾天效果如图14所示。
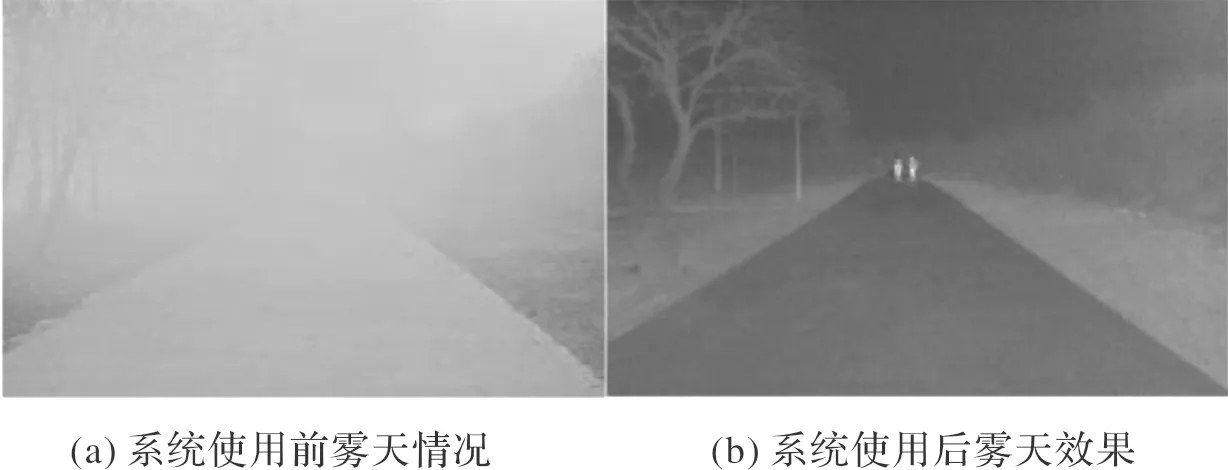
图14 系统雾天效果对比图Fig.14 System fog effect comparison chart
d) 系统可有效地防迎面眩光,其效果如图15所示。
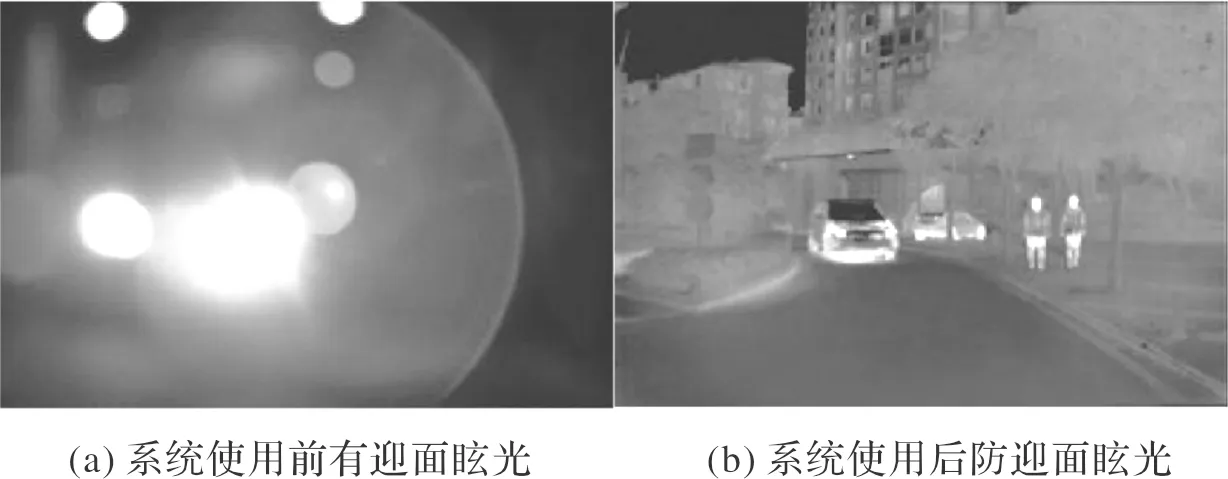
图15 系统防眩光效果对比图Fig.15 System anti-glare effect comparison chart
4 结束语
基于非制冷红外探测技术的军用车辆驾驶员视觉增强系统将大幅度改善驾驶员的环境感知能力,大幅度提高驾驶员的驾驶安全系数及驾车体验。随着非制冷探测器规格、性能的不断提升,对其进行的设计研究可以增强我国对红外热成像技术的掌握和储备[15],加快该技术普及的步伐,有利于满足日益增长的装备应用需求。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
环球时报(2022-05-23)2022-05-23
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
金桥(2021年4期)2021-05-21
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
小学科学(2019年12期)2019-01-06
