
跟踪通信一体化接收光学系统设计
2019-12-13 02:13谢洪波
应用光学 2019年6期
赵 满,谢洪波,陈 梦,杨 磊
(天津大学 精密仪器与光电子工程学院,光电信息技术教育部重点实验室,天津 300072)
引言
激光通信技术具有体积小、保密性强、远距离传输等优点,应用前景广泛,可以应用于固定点之间、移动点之间、固定点与移动点之间的通信[1]。与空间和地面平台相比,机载激光通信系统要求通信的双方在飞行状态下,实现高精度的动态对准和跟踪。机载平台除容易受到背景杂光,大气湍流和恶劣环境的影响外,还具有相对位姿变化快,振动大,受机载设备尺寸限制等特点,因此对机载激光通信系统提出了更高的研制要求[2-3]。
机载激光通信系统的核心技术是如何实现高概率捕获和高精度的跟踪、瞄准(ATP: acquisition, tracking, pointing)。纵观国内外目前已有的研究,机载激光通信系统一般先利用惯导和全球定位系统(GPS)结合的方法对目标进行初始定位,然后用较小的跟踪视场进行区域扫描,以实现目标粗捕获。这种方式不仅捕获概率低,时间长,而且扫描结构体积较大[4-8]。通过增大跟踪视场,采用凝视扫描的方式直接捕获,可以在不牺牲探测距离的前提下,减小目标捕获的时间,且系统体积较小。但捕获视场增大,势必会降低探测的分辨率,同时引入较多的杂散光噪声,从而降低跟踪、瞄准的精度。为此,本文提出一种基于大凝视视场扫描的高精度跟踪通信一体化接收光学系统方案。
1 跟踪通信一体化接收光学系统工作原理
跟踪通信一体化接收光学系统的核心是ATP系统,其工作过程主要分为3部分:激光粗捕获、激光瞄准、跟踪和激光通信,如图1所示。具体工作流程如图2所示。首先,采用凝视扫描的方式,在初始定位后,由位置探测器接收不确定区域内的信标光信号,实现粗捕获;由外部光斑跟踪模块提取此时位置探测器靶面上的光斑质心坐标,并计算脱靶量;然后将控制命令传输至跟踪、瞄准系统中的伺服执行器件,使信标光光斑偏转至位置探测器的中心。重复循环以上步骤,从而实现激光的瞄准和跟踪。采用共轴多光路的方式,将跟踪通信一体化设计,从而建立同步激光通信链路。

图1 ATP系统工作过程示意图Fig.1 Schematic diagram of ATP system working process
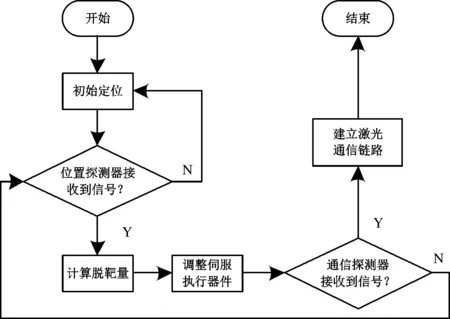
图2 ATP系统工作流程图Fig.2 Flow chart of ATP system
该接收光学系统的核心器件包括位置探测器、通信探测器和伺服执行器件。位置探测器的功能是根据成像的光斑信息得到目标的位置信息,实现大视场的粗捕获,并将信息反馈给光束偏转器件,实现精跟踪。相比电荷耦合器件(CCD)和四象限探测器(QD),高帧频互补金属氧化物半导体(CMOS)具有集成化程度高、大面阵、灵活开窗的特点,可以实现高概率捕获和高精度跟踪[9-11]。通信探测器具有小靶面,高带宽的特点,同光电二极管(PIN)相比,雪崩二极管(APD)可以通过内增益实现更高的探测灵敏度,以增加通信距离[12-13]。伺服执行器件中,快速反射镜(FSM)对激光的波长、角度等不受限制,且具有高带宽和高分辨率的特点[14]。因此,本文研究并设计一种基于CMOS捕获、FSM调节跟踪、APD通信的跟踪通信一体化接收光学系统。
2 跟踪通信一体化接收光学系统方案及设计要求
2.1 系统方案
接收光学系统的布局如图3所示。该系统同时接收双波长的激光信号,其中,信标光起捕获、跟踪、瞄准作用,信息光起通信作用。双波长激光信号共轴,该系统接收到激光信号后,由FSM反射至共用透镜组,然后由分光镜对两波长光束进行分光。经分光镜后光路分成两部分,透射光路经窄带滤光片、会聚镜组后由CMOS探测器接收;反射光路经窄带滤光片、会聚镜组后由APD探测器接收。

图3 跟踪通信一体化接收光学系统布局Fig.3 Layout of tracking communication integrated receiving optical system
2.2 设计要求
2.2.1 跟踪光路设计要求
根据图3跟踪通信一体化接收光学系统的方案,设计了相应的验证系统。由激光衍射极限角计算公式:
(1)
可知,波长越短,衍射极限角越小,且探测器响应峰值在800 nm附近,因此选用808 nm激光作为信标光。本系统采用凝视扫描的方式工作,凝视视场为±175 mrad。CMOS通过计算接收的光斑质心坐标与靶面中心参考点坐标的差值来调节FSM倾斜角度,实现跟踪功能,所以接收光斑的质量决定了该系统的跟踪精度。
CMOS靶面像素尺寸6.5 μm × 6.5 μm,分辨率2 048×2 048像素,通过计算靶面上像素的光强大小得到光斑的质心坐标[15],计算公式如下:
(2)
式中:(X,Y)为光斑质心坐标;(x,y)为CMOS各个像素的坐标;p(x,y)为各个像素对应的灰度值,即光强大小;T为算法设定的目标与背景噪声的阈值。
根据光斑质心计算公式和CMOS的具体工作过程,总结得到接收光斑的质量评价情况,主要有以下几点:
1) 各个视场下光斑的大小。接收光斑的大小决定了接收能量的集中度,进而影响CMOS提取脱靶量的灵敏度,所以接收光斑的尺寸要在一定范围内,一般要求光斑直径小于探测器的2个像素(13 μm)。
2) 各个视场下光斑形状。光斑形状会影响质心坐标的提取,进一步影响CMOS计算脱靶量的精确度。彗差、像散、场曲等像差会影响光斑对称性,因此需要严格控制[16]。
3) 不同视场下光斑一致性。光斑一致性越高,计算脱靶量的算法对于不同视场的普适性越高,精确度也越高。接收的视场越大,光斑一致性越难实现。
2.2.2 通信光路设计要求
通信光路选用大光窗型InGaAs APD作为激光通信探测器,工作波长为1 550 nm;光敏面直径为0.5 mm;通信视场约为跟踪视场的十分之一,为±13 mrad。
通信光路和跟踪光路共轴,共用同一个光阑,具有相同的入瞳直径。由于APD为单点的能量探测器,其与跟踪光路中CMOS成像的要求不同,设计的重点在于边缘视场的优化。通过分配不同视场的优化权重,重点优化边缘视场的像差,使其光斑完全位于APD光敏面上,从而实现通信功能。
3 跟踪通信一体化接收光学系统参数计算与优化
3.1 跟踪光路参数计算与优化
CMOS像面对角线2y=13.3 mm,视场2ω=±175 mrad,由公式:
(3)
(4)
计算可得跟踪光路的焦距f约为38 mm。入瞳直径D=30 mm时,该光路的F数为1.2左右,点列图要小于2个像素直径,且各视场一致性要高,设计难度较大。
选用5片5组的初始结构进行优化。为了优化各视场下光斑形状,需要严格控制彗差、像散等像差,将光阑设置在镜组中间,构造对称结构以减小垂轴像差。为避免背景光的影响和提高信噪比,需在光线角度较小处设置窄带滤光片。由拉赫不变量公式:
nyu=n′y′u′=J
(5)
可知,中间口径最大处光线的入射角度最小。
为满足光斑质心对称以及各视场下光斑的一致性,将镜头设计为像方远心。为满足接收光斑质量的要求,并减小镜组的设计难度和复杂程度,在系统中引入非球面设计。分析光路中的光线走向,将第4片透镜的第一面设置为偶次非球面。此外,应注意分光镜后边透射光路的光轴发生X向偏心,偏心量与分光镜的材料和厚度有关。
最终优化后的跟踪光路图如图4所示。前两片为反射、透射光路的共用镜片,然后依次是分光镜、窄带滤光片、会聚镜组和CMOS,其中第4片镜片的第一面为非球面。
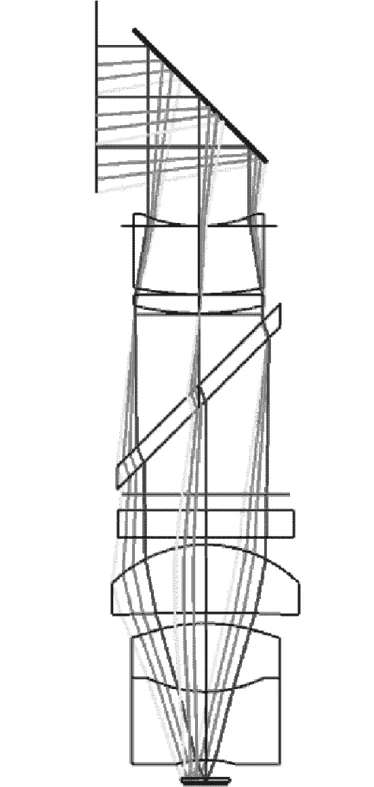
图4 优化后的跟踪光路图Fig.4 Diagram of optimized tracking optical path
3.2 通信光路参数计算与优化
APD光敏面的直径φ=0.5 mm,视场为2ω=±13 mrad,由公式(3)和公式(4)计算可得通信光路的焦距约为19 mm。入瞳直径与跟踪光路相同,D=30 mm时,该光路的F数为0.63左右,设计难度较大。
选用5片5组结构作为初始结构进行优化。通信光路与跟踪光路在分光前为同轴共光路,共用镜组对两个光路同时有影响,因此利用变焦功能将两个光路同时进行优化。通信光路优化时需要注意,通过更改不同视场优化的权重,严格控制边缘视场像差。APD高灵敏度的特点决定了该通信光路对滤光片带宽的要求更高。观察初始结构光线走向,同样将滤光片放置在光阑后。为进一步减小像差和镜组的复杂程度,在系统中引入非球面设计,将第5片第一面设置为偶次非球面进行优化。
最终的通信光路如图5所示。与跟踪光路类似,其中1,2片为反射、透射光路的共用镜片,然后依次是分光镜、窄带滤光片、会聚镜组和APD,其中第5片镜片的第一面为非球面。
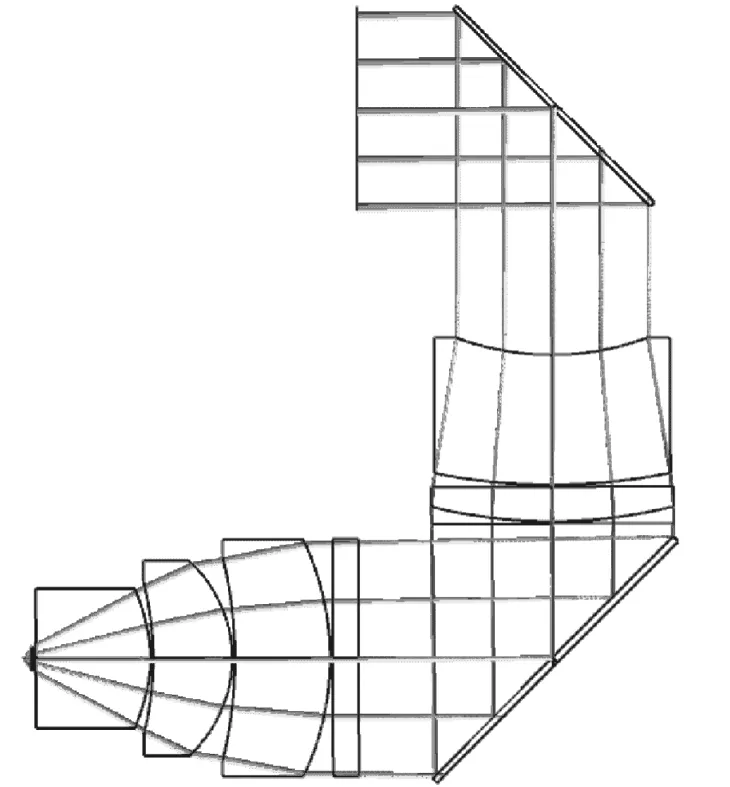
图5 优化后的通信光路图Fig.5 Diagram of optimized communication optical path
3.3 优化结果
最终的优化结果如图6所示。透射光路为跟踪光路,反射光路为通信光路,跟踪光路的点列图如图7所示。

图6 跟踪光路和通信光路图Fig.6 Diagram of tracking optical path and communication optical path
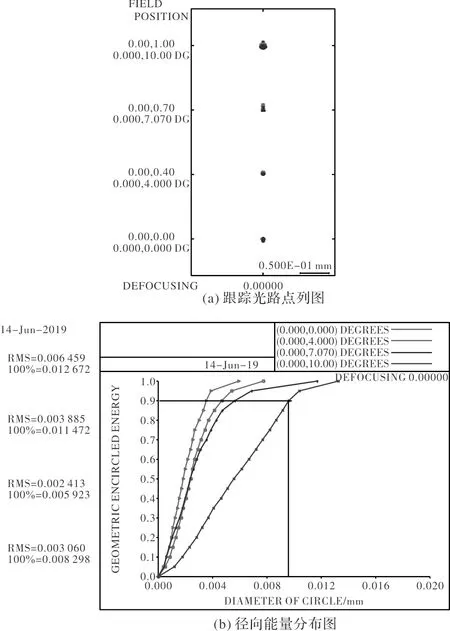
图7 0°,4°,7°,10°视场下,跟踪光路设计结果Fig.7 Design results of tracking optical path under 0°, 4°, 7°, 10° FOV
各个视场下,最终像面RMS光斑直径均小于6.5 μm,即小于一个像素。从径向能量分布图可以看出,各个视场下,最终像面90% 能量的光斑直径小于10 μm,即小于2个像素,接收能量的集中度较高。各个视场下,光斑形状对称性较好,CMOS提取光斑质心坐标计算脱靶量的灵敏度和精确度较高。通信光路的点列图如图8所示。所有视场下,RMS光斑直径小于3.5 μm。由图9光迹图可知,全部视场下的光斑都位于APD光敏面内。

图8 通信光路点列图Fig.8 Spot diagram of communication optical path

图9 通信光路光迹图Fig.9 Light trace diagram of communication optical path
4 杂散光与公差分析
对于机载激光通信系统,杂散光主要影响大视场的跟踪光路。杂散光严重时,可能会掩盖目标信息造成目标捕获困难,或形成伪信号造成目标捕获失败,因此,需对跟踪光路进行必要的杂散光分析。
利用LightTools软件,分别模拟0°,10°,15°,20°,30°入射的信标光和背景杂散光,通过观察像面探测器,检验大角度背景杂散光是否对系统产生影响,如图10所示。由图10(c)可知,只有0°和10°入射的信标光可以成像在探测器上,即不存在鬼像或其他杂散光的影响。
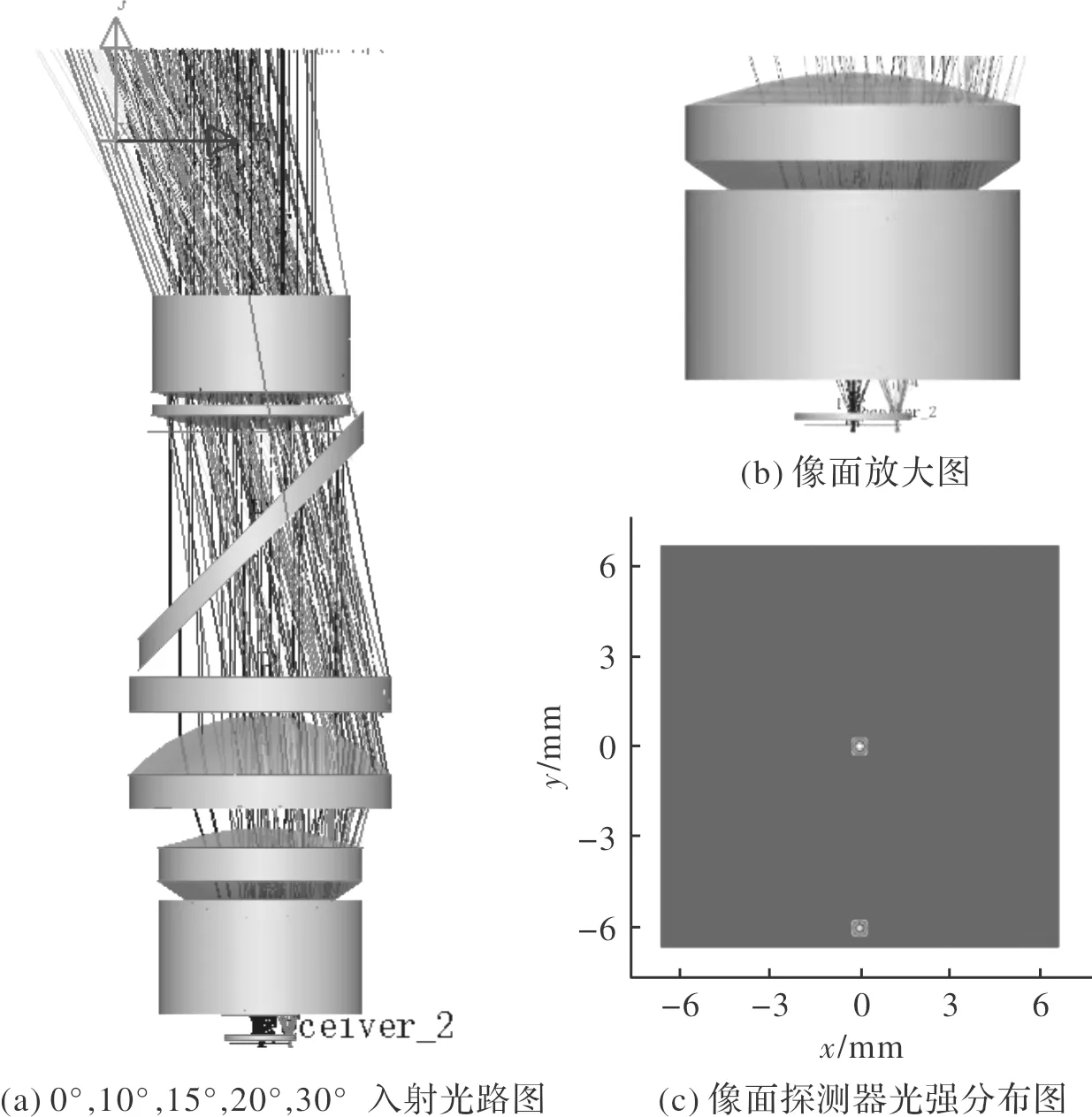
图10 杂散光分析图Fig.10 Analysis diagram of stray light
以RMS光斑半径变化为评价标准做公差分析,当各个表面的公差分配分别如表1和表2时,公差对系统的整体性能影响较小。进行正态分布下的卡特蒙罗计算,最终90%的模拟结果显示,跟踪光路的RMS光斑半径小于5 μm,即小于2个像素大小,通信光路的RMS光斑半径小于3.6 μm,可以全部成像于APD上。由此可知,该系统的公差分配合理。

表1 跟踪光路公差分配Table 1 Tracking optical path tolerance distribution

表2 通信光路公差分配Table 2 Communication optical path tolerance distribution
5 结论
为同时实现高概率捕获和高精度跟踪,本文提出了一种大视场凝视扫描,高分辨率成像的跟踪通信一体化接收光学系统方案。该系统由共轴双光路组成,分别为跟踪光路和通信光路。高帧频CMOS和FSM实现粗捕获、瞄准和跟踪,APD实现通信。对系统的整体光路进行优化设计,并进行杂散光分析、公差分析,最终跟踪光路视场达到±175 mrad,90%能量的光斑直径小于10 μm;通信光路视场达到±13 mrad,RMS直径小于3.5 μm,满足该系统的使用要求。此外,该激光通信系统没有杂散光影响,公差合理,体积较小,性能良好,具有一定实用价值和借鉴意义。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
临床眼科杂志(2020年6期)2021-01-13
制造技术与机床(2019年6期)2019-06-25
中国医疗设备(2019年1期)2019-01-15
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
宇航计测技术(2017年4期)2017-11-27
大众摄影(2015年5期)2015-05-13
中国高新技术企业·综合版(2013年1期)2013-02-04
