车辆自主紧急制动系统仿真*
2019-12-10 06:39:08霍肖楠冯国胜应铭马俊长
汽车工程师 2019年11期
霍肖楠 冯国胜 应铭 马俊长
(1.石家庄铁道大学电气与电子工程学院;2.石家庄铁道大学机械工程学院;3.河北御捷车业有限公司)

近年来国内汽车数量呈爆发式增长,随之而来的交通安全问题也越来越严重。据统计,人为因素占交通事故致因的90%,超过65%的车辆相撞是追尾碰撞。为了提高道路交通的安全性,汽车制动系统的相关技术研究已经成为关键问题[1]。汽车能够自主进行危险碰撞预警并及时采取制动措施,可有效防止因车辆制动系统人为操作不当而引发的交通追尾碰撞事故[2]。根据车身传感器与雷达装置采集的行车信息,可判断出当前行驶状态下是否存在碰撞危险。文章基于理想制动模型对纵向安全距离进行预测,通过阈值法来判别当前的危险工况,当车辆ECU 计算出危险车况时,立刻触发制动系统进行制动。在制动过程中实时根据路面状况以及整车参数对制动力进行防抱死控制调节,实现安全避撞的效果。
1 安全距离模型的建立与制动触发
安全距离模型的建立需要通过车载传感器来获取车辆运行状况的实时信息,将传感器所采信息输入控制处理器中,按照提前设计好的计算方法得到某种可以表示当前车况危险程度的量,系统ECU 可通过阈值法判别紧急危险状况,以及是否触发车辆自主制动措施。毫米波雷达传感器的感知区域为一扇形,需要从横向与纵向2 个方面进行危险判定[3],当自车A 与前方同向行驶汽车B 同时达到危险工况时才可触发制动系统。直线道路行车状态,如图1 所示。
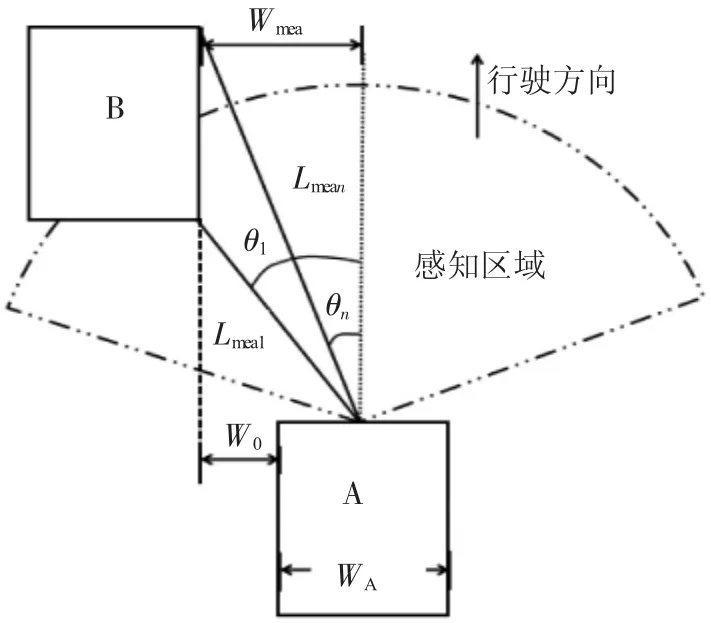
图1 直线道路行车状态
当自车A 行驶时感知到汽车B,由于B 本身具有一定长度范围,故雷达将检测到关于汽车B 位置的一系列数据,上层控制器从中优先选择Lmea1和θ1进行计算[4],得到目标点与毫米波雷达传感器之间的横向距离,如式(1)所示。为了保证行车安全,Wmea应满足的条件,如式(2)所示。两车横向安全距离模型,如图2 所示。
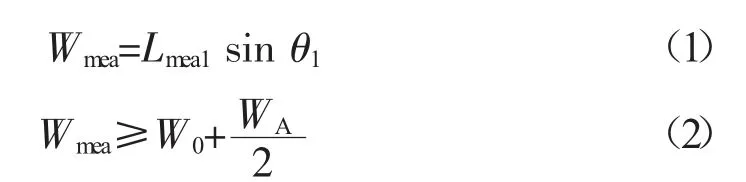
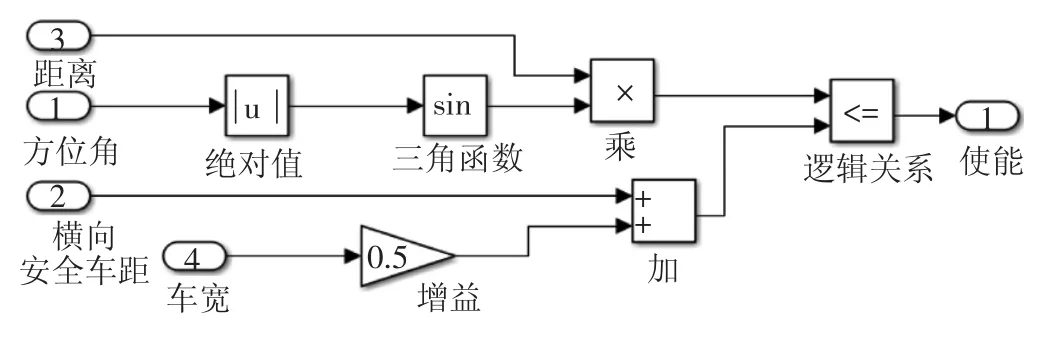
图2 自车与目标车辆的横向安全距离模型
根据自车车速与相对速度等信息计算当前行车状况下的纵向安全距离,进而判断雷达距离最近目标的纵向距离是否达到了紧急状态。文章基于理想状态下的车辆制动过程并结合车辆追击问题,建立纵向安全距离模型。车辆自主紧急制动系统独立于人的驾驶意识,自动采取制动措施,理想状态下车况制动加速度曲线,如图3 所示[5]。
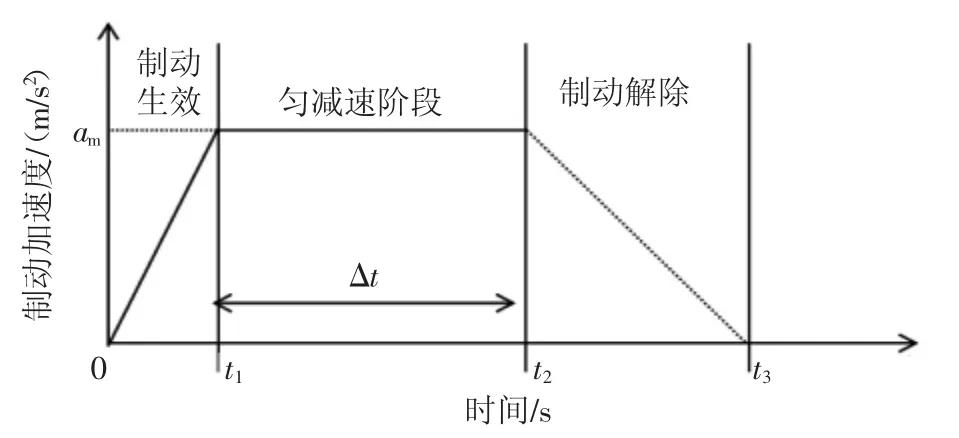
图3 理想状态下车况制动加速度曲线
汽车在自主紧急制动过程中,忽略了驾驶员主观判断路况的反应时间以及制动操作时间,故经过了制动加速度增大阶段以及制动加速度保持阶段,直到车速为0。在计算过程中,取制动加速度上升所用时间为0.2 s,其平方项忽略不计,因此自车在制动过程中行驶的距离,如式(3)所示。

式中:vA——自车制动前的行驶速度,m/s;
am——理想状态下汽车保持的最大制动加速度,m/s2;
sA——自车在制动过程中行驶的距离,m。
自车制动所需的时间(t2/s),如式(4)所示。

在0~t2时间段内,前方目标车辆的纵向行驶距离,如式(5)所示。

式中:sB——前方目标车辆的纵向行驶距离,m;
Δv——前方目标车辆与自车的速度差,m/s。
要想避免追尾碰撞,两车实际的纵向相对距离应大于两车在制动过程中行驶的位移差。自车A 与汽车B 应保持的纵向临界安全距离(d/m)应为制动过程中前后两车的行驶距离差。理想状态下,当两车的实际纵向距离达到该临界安全距离时,两车刚好发生碰撞。

由式(6)可知,纵向安全距离的临界值是随着汽车行驶状态不断变化的,其大小与自车车速、两车相对速度、方位角、最大制动加速度等因素有关。汽车行驶过程中,随时将自车与前方障碍物的实际纵向相对距离(ΔL/m)与安全距离进行比较,判断汽车是否可能发生追尾碰撞危险。

引入一无量纲参数(p)表示汽车可能发生碰撞的危险程度,并设定某一阈值表示发生碰撞危险的临界状态。

由于在实际道路中,汽车的制动过程并非是理想的,制动力生效的反应时间以及最大制动加速度的大小保持均存在误差,故在纵向碰撞危险临界阈值上应保留一定裕量,实际相对距离应取为理想安全距离临界值的1.2 倍。参数p 的阈值状态等级划分如下:
当p>1 时,表明自车与前车保持着十分安全的车距状态;
当0.5<p≤1 时,表示车辆存在一定的碰撞危险,但并不严重,需要驾驶员保持警惕;
当0.2<p≤0.5 时,表明车辆有较大的碰撞危险,汽车应该发出报警提醒驾驶员采取制动措施;
当p≤0.2 时,表明车辆十分接近碰撞危险,系统检测到驾驶员没有进行制动操作后,立即使用最大制动力进行自主紧急制动,以此避免碰撞伤害或减小碰撞损失。
纵向安全距离模型,如图4 所示。
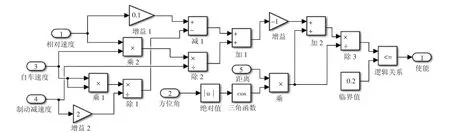
图4 自车与目标车辆的纵向安全距离模型
自主紧急制动系统的危险工况需根据横向与纵向安全距离模型结合判定,两者均达到危险状况时,才应立刻触发制动控制系统,危险工况判定流程,如图5 所示。
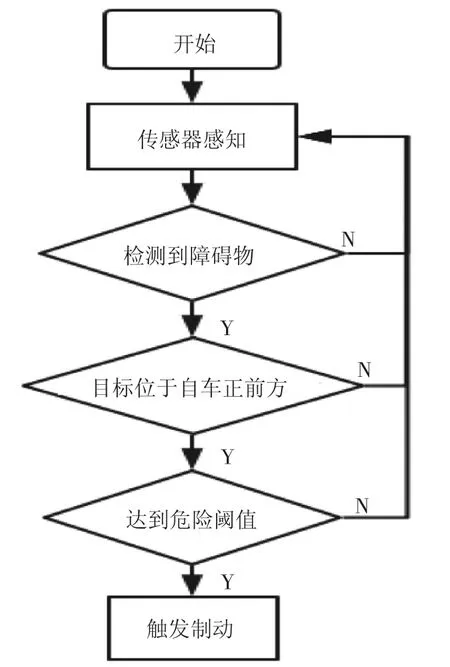
图5 自车与目标车辆的安全距离模型危险工况判定流程
2 防抱死制动系统(ABS)制动控制方法
2.1 车辆制动受力分析及建模
无论是启动还是制动,汽车运动所受外力除了空气阻力,主要由地面提供。在汽车制动过程中,地面制动力越大,制动减速度越大,从而可获取最短制动距离,对汽车制动性能具有决定性影响[6]。而地面制动力与车轮与地面的垂直载荷以及车轮与地面的附着情况有关。车轮在制动状态下的受力情况,如图6 所示。
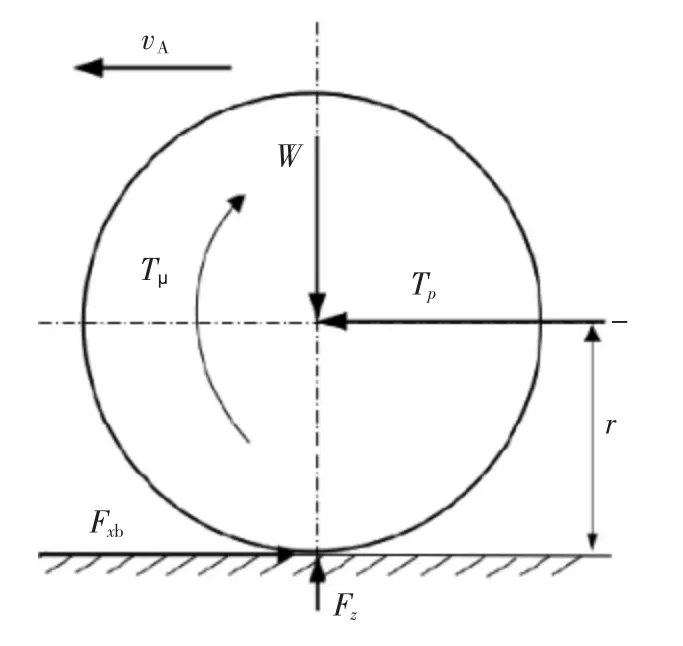
图6 车轮在制动状态下的受力情况
汽车与车轮满足的动力学方程,如式(9)所示。
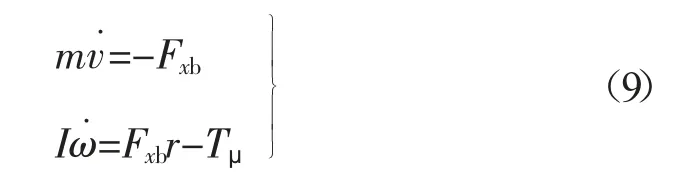
式中:m——整车质量,kg;
I——车轮转动惯量,kg·m2;
车辆动力学模型,如图7 所示。
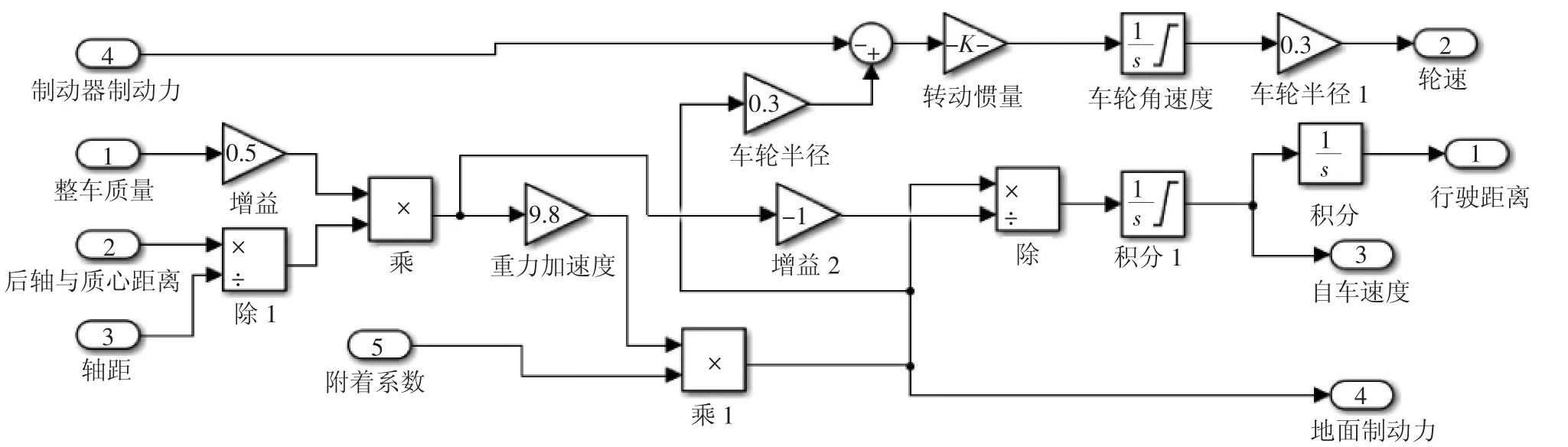
图7 制动状态下车辆动力学模型
2.2 最优地面附着系数与目标滑移率
地面附着力与附着系数和对地面的垂直载荷有关,同一路面车轮的滑移率也影响着路面对车轮的附着系数[7]。附着系数与滑移率的关系,如图8 所示。
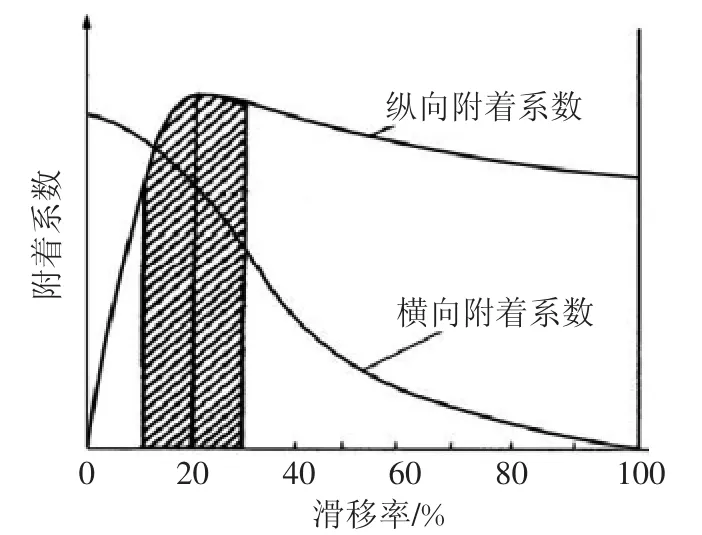
图8 车轮滑移率与附着系数的关系
从图8 可以看出,在任意单一路面,汽车的纵向附着系数首先随着滑移率从0 开始增加而急剧增加,直到滑移率达到某一值时使得附着系数达到最大,然后随着滑移率继续增加,纵向附着系数以相对缓慢的趋势减小,最后趋于稳定。一般情况下,将滑移率控制在0.2 左右时可以获取较大的路面附着系数,取得良好的制动效果。将滑移率的大小与理想值(0.2)进行对比,通过PID 控制对制动力进行调节,使滑移率在制动过程中保持在0.2 左右。
3 自制紧急制动系统(AEB)仿真与验证
3.1 AEB 系统整体仿真模型建立
文章中的AEB 仿真建模主要由五部分组成。
1)紧急车况判定模块。该模块包含了横向安全距离模型与纵向安全距离模型,在前方目标车辆位于自车正前方区域时,主要通过二者的纵向相对距离与纵向相对速度结合自车行驶速度,判断是否有可能发生碰撞危险。整个模块将根据输入信号的值最终输出0或1,当该模块输出1 时,即可触发制动系统,反之则使汽车保持原状态继续行驶。
2)车辆动力学模块。通过自车的整车质量、轴距等固定参数以及路面的附着系数,得到实时状态下的车速、轮速以及行驶位移,本模型仅建立了自车前端单轮的车辆动力学模型。
3)滑移率计算模块。根据车轮的转动角速度、滚动半径以及车速,实时计算车轮的滑移率。

式中:s——车轮滑移率系数;
ω——车轮角速度,rad/s。
4)路面附着系数模块。在路面滑移附着系数曲线上采用Burckhardt 模型描述滑移率与附着系数的关系[8]。

式中:φ——附着系数;
c1,c2,c3——Burckhardt 模型下的路面参数。
假设汽车行驶在干沥青路面,则c1,c2,c3的取值分别为1.28,23.99,0.52,可根据滑移率计算模块的输出值得到当前车况路面与车轮的附着系数。
5)PID 控制模块。已知理想滑移率为0.2,通过滑移率计算模块得到的数值与0.2 作差得到滑移率误差,将误差输入PID 控制器中进一步对制动力进行调节,该车液压制动模型的传递函数[9],如式(12)所示。

将紧急车况判定模块输出的制动使能作用在前向通路上,由此控制制动系统的启动与停止。经过反复调试,PID 的控制参数分别为80,8,1.3。
AEB 整体仿真模型,如图9 所示[10]。
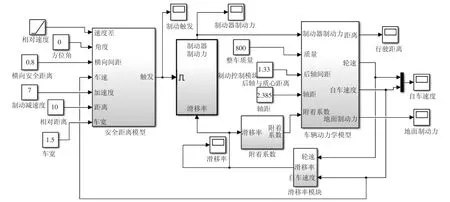
图9 自主紧急制动系统(AEB)整体仿真模型
3.2 AEB 系统仿真及验证
将自车的一些整车参数与制动前的行驶状态作为系统已知输入量,相关信息如表1 所示。

表1 自车整车相关参数数据
为了实现自车行驶过程中从安全到危险的行车工况,设定前方目标车辆位于自车正前方,水平偏角为0,测得两车的相对距离为10 m,制动前自车速度为30 m/s,验证当相对距离从车速为15 m/s 时开始增大,单位增长速度为3 m/s,观察此过程中,系统对危险工况的判定以及制动系统的运行情况。
在前后两车相对速度不断增大的过程中,紧急制动触发信号,如图10 所示。
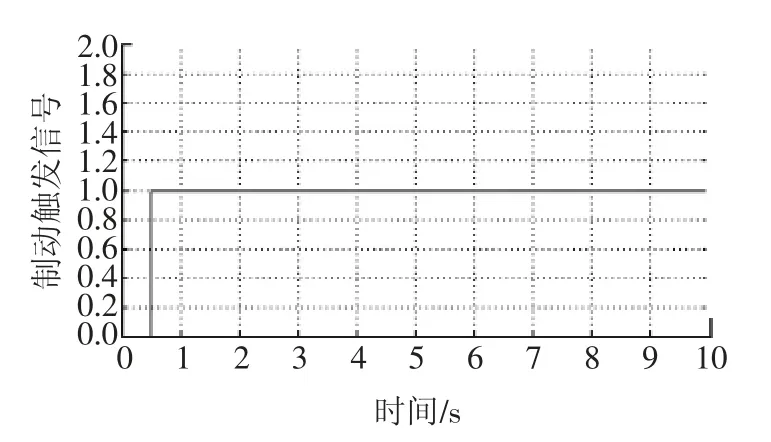
图10 汽车紧急制动触发信号
由图10 可知,相对速度增大约0.5 s 后系统判定为紧急工况,发出紧急制动控制信号,使制动系统使能,制动系统开始工作,使汽车进入减速制动状态。
与此同时车轮制动器制动力、滑移率,以及车轮速度与车速变化曲线,如图11~图13 所示。
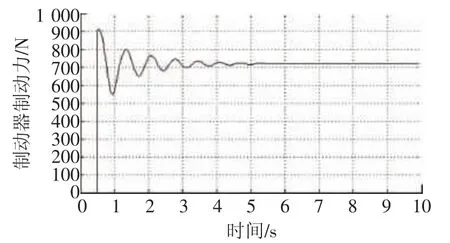
图11 车轮制动力变化曲线
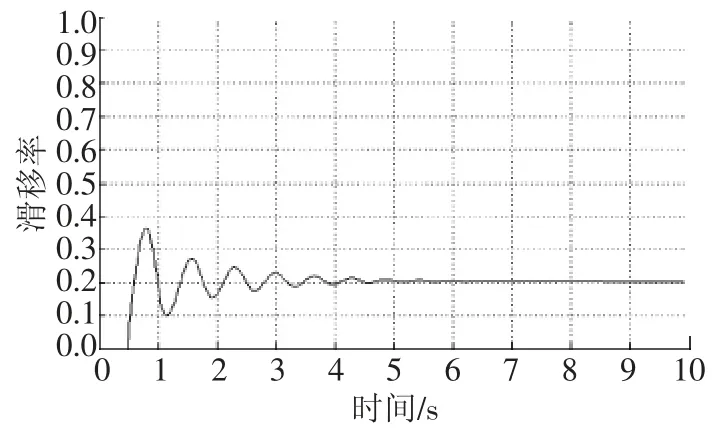
图12 车轮滑移率变化曲线
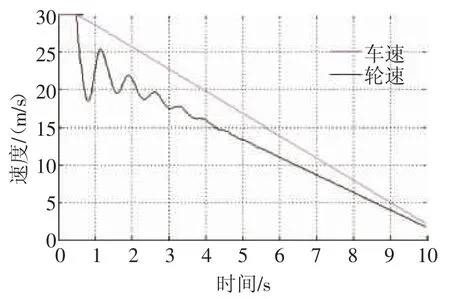
图13 车轮速度与车速变化曲线
4 结论
文章中的仿真系统将制动系统自动触发控制策略与ABS 制动控制相结合。仿真结果表明,在两车相对速度逐渐增大的过程中,碰撞危险也随之增加,当达到安全临界阈值时制动信号将自动触发。在制动过程中对制动器制动力进行调节,使车轮滑移率逐渐趋于0.2 附近,可获取较好的制动附着效果,达到了汽车自动平稳制动的目的。
猜你喜欢
小读者(2019年24期)2020-01-19 01:51:36
汽车观察(2019年2期)2019-03-15 06:00:34
小学生导刊(2018年34期)2018-12-18 01:53:14
小小艺术家(2018年1期)2018-06-05 16:55:48
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
山东青年(2016年3期)2016-02-28 14:25:55
新少年(2015年6期)2015-06-16 10:28:21
母子健康(2015年1期)2015-02-28 11:21:33
延河(下半月)(2014年3期)2014-02-28 21:06:45