
国外三种典型垃圾转运车机械臂上料机构技术分析
2019-12-07 02:09:38合加新能源汽车有限公司
专用汽车 2019年11期
合加新能源汽车有限公司 谢 勇
神龙汽车有限公司 王亚莲
通过对国外三种典型的垃圾转运车机械臂上料机构进行结构、运动过程、参数特点等方面的分析,进一步总结出三种机械臂上料机构在性能上的优缺点,为适合国内垃圾收运特点的机械臂的研发提供了参考。
国内外越来越多的地区(包括农村地区)正采用垃圾桶装载作为最为主流的垃圾装载方式, 通常采用120L/240L 塑料垃圾桶装载生活垃圾,此方式具有垃圾桶放置方便、方便移动、 质量轻、 成本低等几大优点。当使用垃圾车对垃圾桶内垃圾转运时,需要采用机械化的上料机构将垃圾桶内的垃圾倒入垃圾箱中。
目前国内的垃圾车具有各种各样的后装、侧装机构,但这些机构都需要先将垃圾桶挂到机构上,然后才能进行装载, 环卫工人的劳动强度较大。国外很多厂家已经开发出多种专用机械臂上料机构,环卫工人无需下车即可完成垃圾桶上料工作。本文将对国外三种典型的机械臂上料机构进行论述。
Heil 公司 DURAPACK® PYTHON®型机械臂
1.组成结构分析
Heil 公司 DURAPACK® PYTHON®型机械臂由抱桶手爪、举升臂、伸展臂、伸展油缸、举升油缸、抱桶油缸、基座、液压控制系统、电气控制系统、软件操作系统等几大部分构成,如图1所示。主要参数如表1所示。
2.运动过程分析
2.1 机械臂抓桶过程
伸展油缸伸出时带动伸展臂展开,抱桶手爪远离车箱的同时向下运动;举升油缸辅助部分收回带动举升臂展开,抱桶手爪远离车箱的同时向上运动;抱桶手爪到达垃圾桶位置,抱桶油缸伸出带动抱桶手抓抓住垃圾桶。机械臂抓桶伸展如图2所示。

图1 DURAPACK® PYTHON®型机械臂
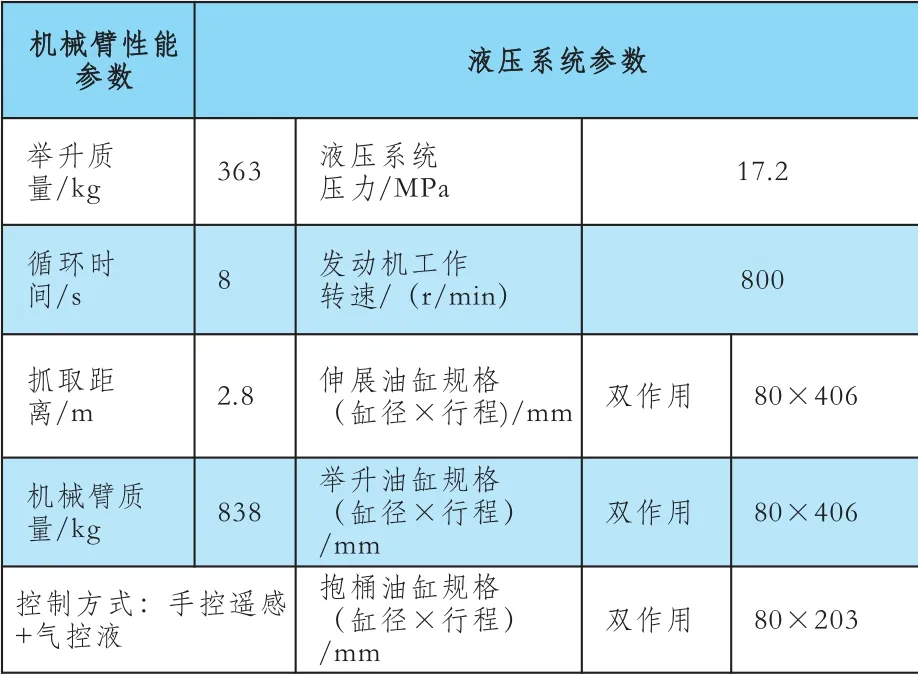
表1 DURAPACK® PYTHON®型机械臂主要参数

图2 机械臂抓桶伸展
2.2 机械臂提桶卸料过程
伸展油缸缩回时带动伸展臂折叠收回,抱桶手爪靠近车箱同时向上运动;举升油缸完全收回,带动举升臂完全展开,抱桶手爪同时向上运动,同时带动垃圾桶倾翻,垃圾桶垃圾倒入垃圾箱中。
2.3 机械臂放桶过程
举升油缸部分伸出带动垃圾桶翻转回位,伸展油缸伸出时带动伸展臂展开,抱桶手爪远离车箱同时向下运动,抱桶手抓到达垃圾桶放置位置;抱桶油缸缩回带动抱桶手爪松开垃圾桶。 机械臂提桶卸料示意图如图3所示。
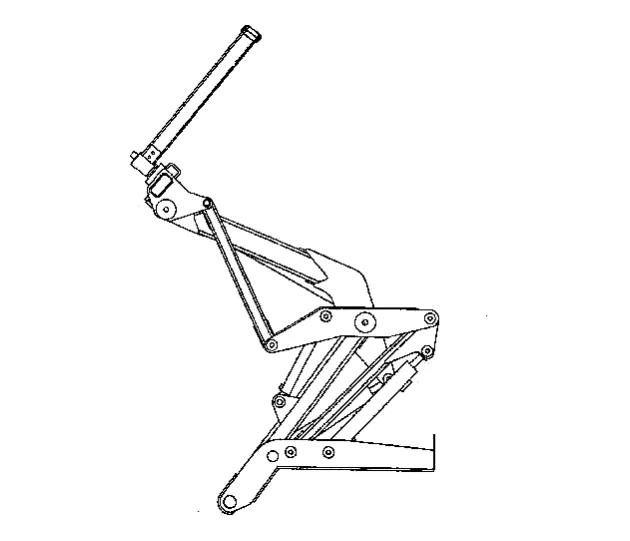
图3 机械臂提桶卸料
2.4 机械臂收回原点位置
伸展油缸缩回时带动伸展臂折叠收回,同时举升油缸完全伸出带动举升臂完全展开, 机械臂收回原点位置。机械臂原点位置如图4所示。

图4 机械臂原点位置
3.机械臂操控系统
DURAPACK® PYTHON®型机械臂操控起来仅仅通过一个操作手柄+两个按钮即可完成机械臂的举升-放下、展开-收回、抓取-松开、机械臂回初始原位等各项操作。机械臂操控手柄如图5所示。

图5 机械臂操控手柄
4.性能分析
DURAPACK® PYTHON®型机械臂操控时仅通过一个操作手柄+两个按钮即可完成机械臂的举升-放下、展开-收回、抓取-松开、机械臂回初始原位等各项操作。
4.1 性能优势
DURAPACK® PYTHON®型机械臂在收缩回初始位置的时候,伸展臂和举升臂是折叠起来的,所以占用空间比较小。同时机械臂完全展开时的整体长度包括了举升臂和伸展臂两段长度,机械臂展开长度比较长,同样的道理其举升的高度也更高。通过前面的运动分析看出机械臂的几个油缸可以同时联动,所以其运动循环时间仅需8s。
4.2 性能劣势
通过对DURAPACK® PYTHON®型机械臂的运动分析可以看出,在机械臂抓桶过程中,不仅伸展油缸伸出时带动伸展臂展开,举升油缸同时需要辅助部分收回带动举升臂展开;放桶时,伸展油缸伸出时带动伸展臂展开,举升油缸同时需要辅助部分伸出,带动垃圾桶翻转回位以及举升臂适当收回;抓桶和放桶的过程需要伸展油缸和举升油缸紧密配合联动,抱桶手爪的运动轨迹呈现为曲线运动,而且根据垃圾桶位置的不一致,抓桶和放桶过程机械臂的运动轨迹是不一致的,这就导致机械臂的运动控制变得复杂,人工操控机械臂难度增加, 如果机械臂控制系统设计不好,机械臂运动的过程会存在抖动、卡滞的问题隐患。

图6 Ranger 型机械臂
Bridgeprot 公司 Ranger 型机械臂
1.组成结构分析
Bridgeprot 公司 Ranger 型机械臂由抱桶手爪、举升臂、伸展臂、举升油缸、 翻转油缸、 伸展油缸、 抱桶油缸、基座、液压控制系统、电气控制系统、 软件操作系统等几大部分构成,如图6所示。主要参数如表2所示。
2.运动过程分析
2.1 机械臂抓桶过程
伸展油缸伸出带动伸展臂展开,抱桶手爪远离车箱运动,抱桶手爪到达垃圾桶位置,抱桶油缸伸出带动抱桶手爪抓住垃圾桶。

表2 Ranger 型机械臂主要参数
2.2 机械臂提桶卸料过程
伸展油缸缩回时带动伸展臂收回,抱桶手爪靠近车箱;举升油缸收回带动抱桶手爪向上运动,翻转油缸缩回带动垃圾桶倾翻,垃圾桶垃圾倒入垃圾箱中。
2.3 机械臂放桶过程
翻转油缸伸出带动垃圾桶翻转回位,举升油缸伸出带动抱桶手爪向下运动,伸展油缸伸出时带动抱桶手爪远离车箱,抱桶手爪到达垃圾桶放置位置,抱桶油缸缩回带动抱桶手爪松开垃圾桶。
2.4 机械臂收回原点位置
伸展油缸缩回时带动伸展臂收回,机械臂收回原点位置。
3.性能分析
3.1 性能优势
DURAPACK® PYTHON®型机械臂伸展臂的伸展-缩回,举升臂的上升-下降为简单的直线运动,并可以通过单一油缸的运动得以实现。整个运动过程控制比较简单,运动平稳性较好,驾驶员也更容易操作。
3.2 性能劣势
DURAPACK® PYTHON®型机械臂安装时占用空间较大,机械臂展开后臂长较短,同时机械臂上料高度较矮,需要在垃圾箱侧面设计一个专门的进料口。
McNeilus 公司 Zero-Radius 型机械臂
1. 组成结构分析
McNeilus 公司 Zero-Radius 型机械臂由抱桶手爪、伸展臂、提升导轨、液压马达、伸展油缸、基座、液压控制系统、电气控制系统、软件操作系统等几大部分构成。如图7所示。主要参数如表3所示。

表3 Zero-Radius 型机械臂主要参数
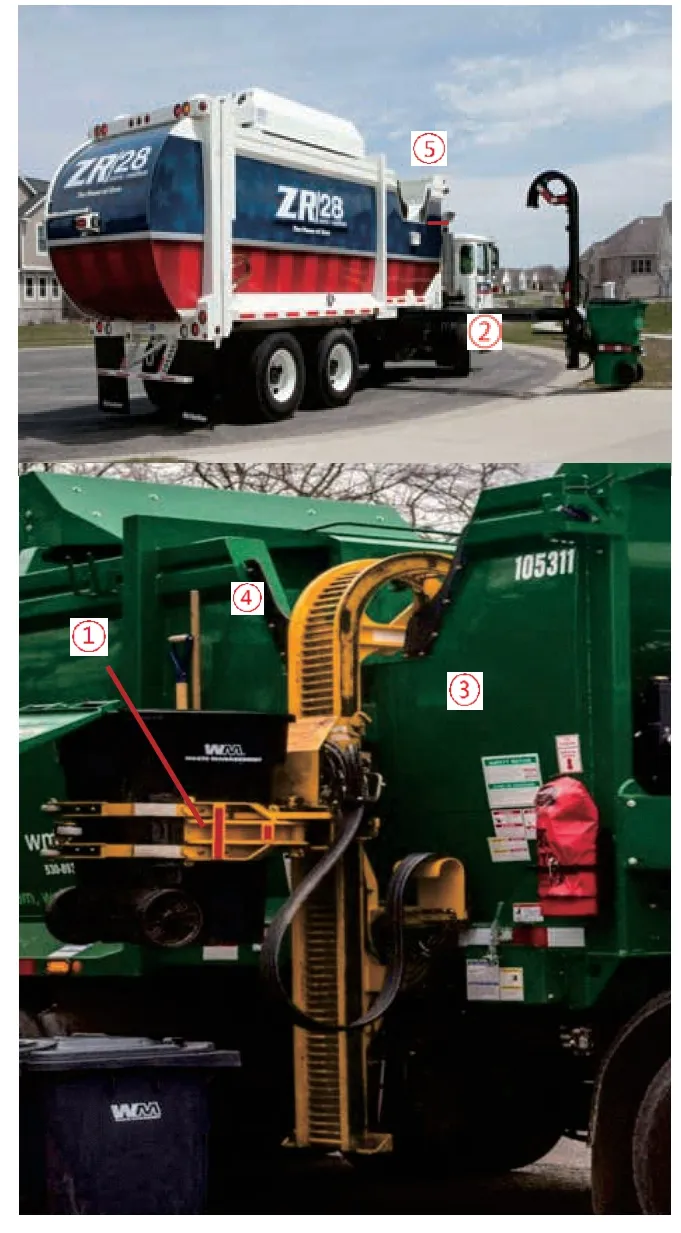
图7 Zero-Radius 型机械臂
2. 运动过程分析
2.1 机械臂抓桶过程
伸展油缸伸出带动伸展臂展开,抱桶手爪(包括导轨)远离车体运动,抱桶手爪到达垃圾桶位置, 抱桶油缸伸出带动抱桶手爪抓住垃圾桶。机械臂伸出抓桶如图8所示。
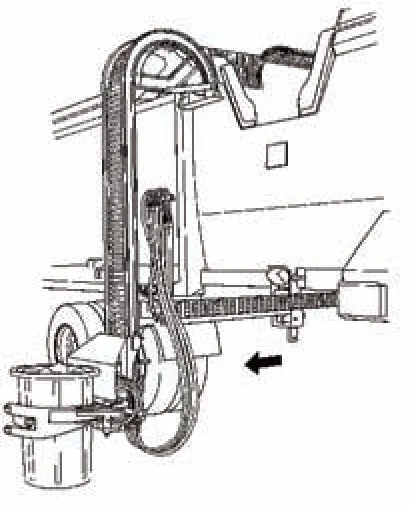
图8 机械臂伸出抓桶
2.2 机械臂提桶卸料过程
伸展油缸缩回时带动伸展臂收回,抱桶手爪(包括导轨)靠近车体;液压马达带动抱桶手爪沿着轨道运动,抱桶手爪带着垃圾桶沿着导轨向上运动并倾翻,垃圾桶垃圾倒入垃圾箱中。机械臂提桶卸料如图9所示。
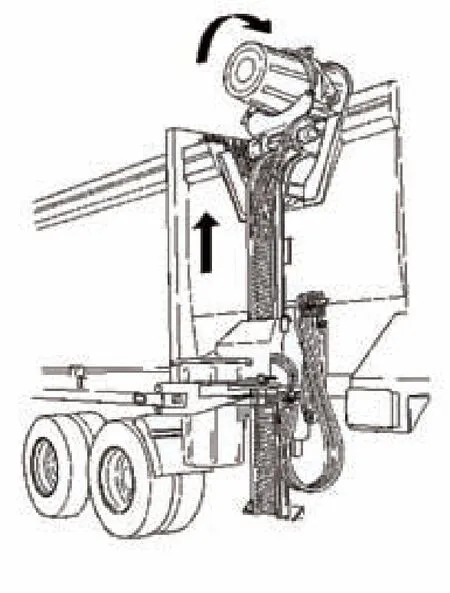
图9 机械臂提桶卸料
2.3 机械臂放桶过程
液压马达带动抱桶手爪沿着导轨翻转并向下运动,伸展油缸伸出时带动抱桶手爪(包括轨道)远离车箱, 抱桶手爪到达垃圾桶放置位置,抱桶油缸缩回带动抱桶手爪松开垃圾桶。
2.4 机械臂收回原点位置
伸展油缸缩回时带动伸展臂(包括轨道)收回,机械臂收回原点位置。
3.性能分析
3.1 性能优势
McNeilus 公司Zero-Radius 型机械臂伸出-缩回为简单的直线运动,上料时抱桶手爪在液压马达的推动下沿着导轨运动,整个运动过程控制比较简单,运动平稳性较好,驾驶员也容易操作。同时由于采用了导轨式结构,机械臂上料高度更高。
3.2 性能劣势
由于采用导轨的框架结构,整个机械臂占用空间比较大,直线运动的伸展臂的伸出距离较短。由于导轨随着伸展臂一起运动,其结构强度要求更高。
结语
国外垃圾机械臂上料机构有很多种,不同的结构都有其设计特点,本文仅仅选取了三种比较有代表性的进行了技术分析。机械臂上料机构最大的特点就是无人化,大大减轻了环卫工人的劳动强度,大大降低了垃圾收运的成本,是未来垃圾收运的发展方向。国内的垃圾机械臂设计人员在参考国外机械臂上料机构设计时,一定要考虑到不同结构性能上的优缺点,并且一定要结合国内垃圾成分特点以及国内垃圾收运模式进行综合考虑,才能设计出适合国内垃圾收运特点的机械臂。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26 13:41:28
橡塑技术与装备(2021年24期)2021-12-30 07:07:16
橡塑技术与装备(2021年12期)2021-06-24 09:30:34
橡塑技术与装备(2021年1期)2021-01-05 04:00:56
河北省科学院学报(2020年4期)2020-03-19 02:02:38
中国特种设备安全(2019年7期)2019-09-10 07:30:42
电子制作(2018年24期)2019-01-03 02:30:30
新能源科技(2018年10期)2018-02-15 20:23:20
荣誉杂志(2017年7期)2017-08-23 08:05:59
制造技术与机床(2015年10期)2015-04-09 07:05:58
