
抑制超低频振荡的调速器PID参数多机协调优化
2019-12-06 08:24张建新黄磊周挺辉杨欢欢刘蔚
广东电力 2019年11期
张建新,黄磊,周挺辉,杨欢欢,刘蔚
(1. 中国南方电网电力调度控制中心,广东 广州 510623;2.直流输电技术国家重点实验室(南方电网科学研究院有限责任公司),广东 广州 510663)
2016年,南方电网主网与云南电网实施异步运行方式,云南电网通过多回直流输电系统与主网进行连接。该方案的实施有效地解决了多回直流换相失败后引发的主网功角失稳问题,但造成云南电网的频率失稳风险大增。尤其在进行直流功率提升等相关试验项目时,发现云南电网出现了振荡频率约为0.05 Hz的超低频振荡现象。近30 a鲜有出现类似问题,研究也相对缺乏[1-4]。
此前研究主要关注水轮机调节的动态特性[5-6],还未能揭示超低频振荡的机理。文献[7-8]将调速器模型升级为更加详细的控制系统模型后,可成功复现超低频振荡现象。文献[9]也明确了超低频振荡与调速器产生的负阻尼密切相关。文献[10]基于单机单负荷系统对超低频振荡的关键特征和振荡表现进行了研究,初步厘清了超低频频率振荡的机理和特征。文献[11]采用频域法对影响调速器稳定的因素作出分析研究。文献[12]分析了调速系统频率模态对电网低频振荡的影响。文献[13]提出了利用直流频率限制控制承担调频作用或重新整定机组调速器PID参数2种抑制超低频振荡的控制措施,并得出整定PID参数的措施更合理的结论。文献[14]在9节点系统中利用时域仿真验证了机理分析的结果,并采用临界参数法和极点配置法优化水轮机调速器参数。目前用于抑制超低频振荡主流的方案是对水电机组调速器的PID参数进行优化整定,如文献[15-16]提出的改进粒子群优化方法,文献[17]提出的遗传算法优化等。
然而,已有的研究存在一定的不足。文献[10-12,15-17]均基于单机系统对PID参数优化进行研究,但云南电网异步后大网系统已经没有足够的阻尼使得频率能够迅速稳定,各台机组通过频率特征量强相关地耦合在一起,整定某一台水电机组的PID参数将直接影响其余所有机组,单机系统的分析方法已经无法适应。此外,文献[15-17]所提及的粒子群算法、遗传算法复杂度随着机组台数的增加呈指数级上升,且单一的目标函数难以揭示已有参数的改进方向。文献[13]所提及的整定方法和优化方案略显简单。
综上所述,目前并没有很好的方案能够从整体上对云南电网水电机组的PID参数进行多机协调优化。本文将分析水电机组PID各参数对超低频振荡现象的影响,提出了一种能对全网水电机组调速器PID参数进行多机协调优化的策略。该策略的计算复杂度不超于O(n2),综合考虑了机组间的相互影响,平衡了各台机组的调频能力,同时提升了大网系统的频率响应阻尼比。
1 PID参数敏感性分析
引发系统超低频振荡的机理可参考文献[7]和文献[10],在保留水电机组调速系统主要特性的前提下,对水电机组调速系统的模型进行适当简化[17-18],可以得到单机的调速系统模型。水轮机组原动机及其调速系统的传递函数
(1)
式中:ΔPm为机械功率增量;Δω为频率改变量;Gpid(s)、Gy(s)、Gw(s)分别为调速器、伺服系统、原动机的传递函数;Kd、Kp、Ki分别为PID环节微分、比例、积分系数;bp为调差系数;Ty、Tf分别为伺服系统、水流惯性时间常数;s为拉氏变量。衡量该开环系数阻尼特性的阻尼系数[18]
D=Re(GGOV(jω)).
(2)
式中ω=2πf为角速度,f为系统频率。D越大,表明正阻尼越强,反之亦然,D为负则表明调速系统提供负阻尼。利用云南某机组实测参数:Kp=1.7,Kd=2,Ki=0.6,Tf=3,bp=4%,Ty=1.7;改变Kp、Kd、Ki其中1个参数,观察不同频率下的D的变化,如图1—图6所示。
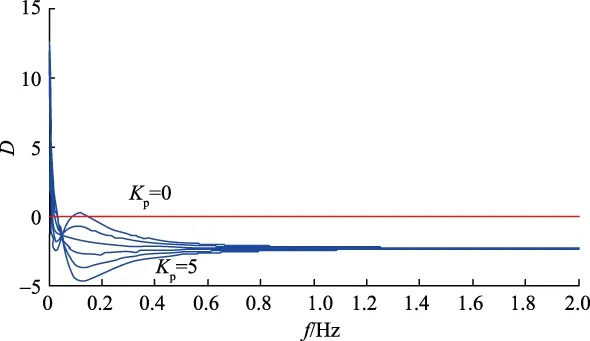
图2 Kp变化时阻尼特性变化曲线(f=0~2 Hz)Fig.2 Damping ratio curve when Kp changes(f=0~2 Hz)

图3 Ki变化时阻尼特性变化曲线(f=0~0.2 Hz)Fig.3 Damping ratio curve when Ki changes(f=0~0.2 Hz)
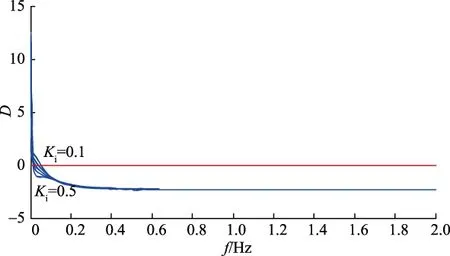
图4 Ki变化时阻尼特性变化曲线(f=0~2 Hz)Fig.4 Damping ratio curve when Ki changes(f=0~2 Hz)

图5 Kd变化时阻尼特性变化曲线(f=0~0.2 Hz)Fig.5 Damping ratio curve when Kd changes(f=0~0.2 Hz)

图6 Kd变化时阻尼特性变化曲线(f=0~2 Hz)Fig.6 Damping ratio curve when Kd changes(f=0~2 Hz)
根据单机系统开环阻尼特性分析,可得到水电机组调速器PID各参数的敏感性,并有以下论断:
a)微分系数Kd不但改变了超低频振荡的系统特性,同时改变了低频段的系统特性,这将与电力系统静态稳定器(power system stabilizer,PSS)的作用叠加;抑制全网超低频振荡需要较大的Kd,但抑制局部地区低频振荡则要求Kd较小,二者相互矛盾。比例系数Kp和积分系数Ki的改变基本只影响超低频段的响应特性,对低频段影响甚微。
b)Ki增大时阻尼将逐渐减少,故Ki应越小越好。
c)在Ki≠0时,Kp增大过程中阻尼将先增大,随后减少,即存在一个使得系统阻尼最大的拐点,这与文献[14]的结论一致。
2 多机协调优化目标
云南电网异步后已经无法按照无穷大系统进行分析,当系统发生故障导致功率不匹配时,系统频率将发生大幅扰动,各机组将通过频率特征量强相关地耦合在一起。在超低频段,调速系统产生的负机械阻尼[19]、机组提供的正电气阻尼以及大网系统提供的正阻尼将共同作用于机组。而大网所提供的正阻尼特性与机组接入的位置、网架的结构、近区的负荷水平及开机状态密切相关,单机系统无法对此进行描述;因此采用传统的单机优化方法,可能会造成不同机组间响应差异巨大。以目前云南电网为例,实际的运行参数中对于某大直流单极闭锁后(功率过剩2 500 MW),主力电厂P的1号机组和主力电厂Q的1号机组的机械功率响应特性分别如图7和图8所示。图7和图8中3条直线从上至下分别为调节量达到理论值0.92倍、1.00倍、1.08倍时的参考线。

图7 主力电厂P的1号机组机械功率曲线Fig.7 Mechanical power curve of No.1 unit in power plant P

图8 主力电厂Q的1号机组机械功率曲线Fig.8 Mechanical power curve of No.1 unit in power plant Q
由图7和图8可知:主力电厂P的1号机组扰动巨大,暂态过程中有将近30 MW的超调量,长时间后才进入稳态;主力电厂Q的1号机组扰动微小,暂态过程中超调量少于5 MW,能够迅速进入稳态。上述现象是由于电厂P和电厂Q不协调导致的。
此外,云南电网中主力电厂S不存在PID调速控制器,但其控制系统可以等效为Kp=8.3、Ki=Kd=0的调速系统。由于Kp远大于常规值,在系统频率发生偏差的情况下,该机组能迅速调出较大的功率,但会维持较长时间的振荡;同时由于其承担了系统较大的功率缺额(或过剩),其余机组扰动将显著减少并迅速进入稳态。换言之,若允许某些机组承受较大的波动,令其迅速调出系统所需功率,则可以改善整个电网的阻尼特性及其余机组的调频性能;反之,若需要全网所有机组均达到较好的调频指标,则需要某些调节量较少的机组承担较多的功率波动,以改善调频波动过大的机组。本文的协调优化策略将重点考虑这一特性。
目前南方电网一次调频运行管理规定中主要有如下指标要求:
a)机组响应时间。一般应小于等于3 s,此参数主要由水锤效应Tf决定,PID参数基本不起作用,本文不考虑此指标。
b)一次调频速度要求。要求在15 s内机械功率调节量能达到稳态目标值的90%。
c)机组一次调频稳定时间应少于一定的数值。云南电网异步前,该指标指频率稳定后,在45 s内机组的机械功率平均值与目标值偏差在3%以内。能源局南方监管局[20]则要求在频率稳定后,60 s内达到机组负荷稳定。但异步后上述要求存在明显的问题:①云南电网不能等效为无穷大系统,由于超低频振荡的存在,频率稳定需要1~2 min甚至更长;②如图7上述主力电厂P机械功率所示,其平均值可能与目标值一致,但机械功率持续振荡且无法平息;③监管局的要求对负荷稳定没有明确的指标要求。
基于上述理由,原有的定义已经无法适应实际的需求。参考其他电网相关的规范[21],本文定义一次调频时间为:机组机械功率最后一次进入偏离稳态值8%范围之内,且不再越出此范围。结合目前南方电网的运行状况及运行指标要求,将调速器PID参数多机协调优化目标定义为:在各机组满足一次调频速度要求的前提下,全网所有机组的一次调频稳定时间最小。
3 调速器PID参数优化策略
基于上述分析及规范,本文提出一种启发式的PID优化策略,该策略包括以下步骤:
步骤1,对各机组的微分系数Kd进行优化,使其在保证低频振荡满足要求的情况下尽可能大。低频振荡为电网局部问题,不同机组间的关联性不大,可与PSS优化同时进行。
步骤2,将需要进行优化的水电机组调速器的PID参数Kp和Ki,按照PID传统Ziegler-Nichols整定法(简称“Z-N法”)设定为较小的数值。Z-N法[22]为自动控制领域PID参数整定传统方法之一,在此不做详述。通过此法,单机系统能够较好地处理一次调频及稳态时间的问题。但接入大系统后,考虑到大系统的正阻尼特性,机组将受到强阻尼,致使一次调频速度严重不足。
步骤3,设置一个会导致云南电网功率不匹配的故障,例如将云南电网的某回大直流进行单极闭锁,并对系统进行仿真。此扰动激发云南电网的超低频振荡现象,获取振荡的频率、周期等信息。
步骤4,对于所考察的某台机组(第k台),获得其超调比例Os,k,以及稳态时间ST,k。相关参数的定义如图9所示。图中“第二摆”的定义为:时间为故障发生后的1.5T~2.5T所对应的曲线,T为步骤3中测量的周期。

图9 策略中的各参数定义Fig.9 Definition of parameters in the strategy
计算获得其理论上应该需要输出的稳态调节量
(3)
式中:Ff为扰动结束后系统的稳态频率;Fref为系统的标准频率;Sq,k为第k台发电机的PID调节死区;bp,k为第k台发电机的调差系数;Pk为第k发电机的额定功率。将Os,k定义为机械功率曲线第二摆极值所对应的调节量除以AD,k所得的商。稳态时间ST,k定义为:机械功率首次落入到理论稳态调节量AD,k误差8%以内(即调节量在0.92AD,k~1.08AD,k),并且机械功率不再越出此范围所对应的时间。若在仿真时间内找不到符合上述条件的时刻,则令ST,k=180 s。
步骤5,若其Os,k<1.0,则增大其积分系数Ki,k,令Ki,k在原来的基础上增大0.05。若存在任一发电机具有上述情况,则返回步骤3,否则进入步骤7。
步骤6,第奇数次进入此步骤,对各台机组的ST,k进行排序,对于ST,k最小的2m台机组,令其比例系数Kp增大0.1,进入步骤7;第偶数次进入此步骤,对各台机组的Os,k进行排序,对于Os,k最大的m台机组,令其比例系数Kp减少0.1,进入步骤7。一般地,m越大,PID优化的速度越快,但精度会相应降低,m的典型值取5。
步骤7,若所有机组的ST,k均少于一定的阈值ST,则结束,否则回到步骤3。一般地,阈值ST可以由用户指定,ST越大,大电网振荡越厉害,但PID优化的速度会越快,云南电网ST典型值取90 s。
本策略的特点在于:
a)步骤4考察第二摆的调节量,该时间主要由PID调速器决定,排除了其余时间常数较短的控制器(如PSS等)的影响;
b)步骤7考察稳态时间,将调频速度及调频稳定2个相对矛盾的指标统一起来。调频速度不达标,将导致长时间后才能达到理论稳态值;超调过大振荡较严重,则无法满足不再越出8%误差范围的要求。较小的稳态时间则意味着二者均在较好的范围内。
c)步骤6实际包含了2个策略:①寻找调频速度不足的机组,通过增加Kp改善其速度;②寻找调频性能超调最严重的机组,通过减少Kp削弱其超调幅度。通过这2个策略的交替计算,实现了多机间的调频性能平衡,达到全网机组调频性能协调优化的目标。
d)该策略计算复杂度略高于O(n),小于O(n2),这是传统的粒子群算法、遗传算法难以比拟的。
4 仿真验证
以南方电网2018年“迎峰度夏”方式为基础数据,选取云南电网62台主力电厂机组作为测试机组,利用本文策略进行验证。为减少篇幅,表1仅展示其中10台机组优化前后PID参数及性能。
基于表1参数,优化前后的某5 000 MW直流单极闭锁下(功率过剩2 500 MW)电网频率响应如图10所示。

表1 机组优化前后PID参数及性能对照表Tab.1 Comparisons of PID parameters and performance before and after optimization

图10 优化前后系统频率响应对比Fig.10 Comparison of system frequency response before and after optimization
暂态过程中系统最高频率无明显差异,优化前阻尼比为0.056,优化后为0.126,阻尼比大幅提升。优化前后部分机组的机械功率曲线分别如图11—图14所示,从上至下3根直线分别为调节量为理论值0.92倍、1.00倍、1.08倍的参考线。机械功率落入上、下参考线之间且不再越出认为系统进入了稳态。
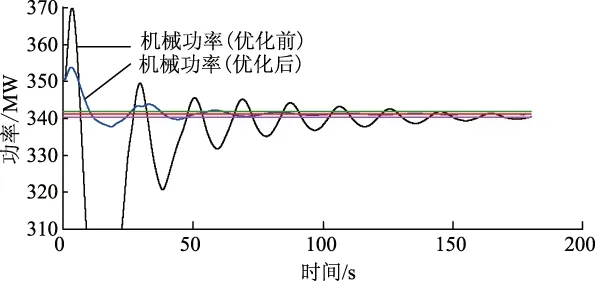
图11 优化前后主力电厂A机械功率对比Fig.11 Comparison of mechanical power of power plant A before and after optimization
由图11可知:优化前主力电厂A的Kp及Ki明显过大,造成了严重的超调;通过减小Kp及Ki,优化后的系统能够较快地进入稳态。

图12 优化前后主力电厂B机械功率对比Fig.12 Comparison of of power plant B before and after optimization

图13 优化前后主力电厂C机械功率对比Fig.13 Comparison of of power plant C before and after optimization
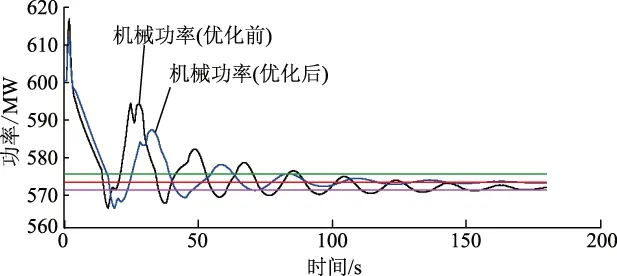
图14 优化前后主力电厂H机械功率对比Fig.14 Comparison of power plant H before and after optimization
由图12可知:优化前主力电厂B的阻尼过大,调频速度不足;优化后在基本不改变参数的情况下,由于系统整体性能的改善,其调频速度得到显著提升。
由图13可知:优化前主力电厂C由于Kp过大,Ki过小,超调严重但稳态调节量不足;优化后超调显著减少且稳态调节量满足要求。
由图14可知:优化前主力电厂H超调比较合适,但振荡过程太长;通过减小Kp,结合系统整体的性能改善,优化后系统调频性能得到改善。
表中其余6台以及未列于表中的其他52台机组,基本为上述4种情况之一。
考察上述参数在不同工况下的适应性,结果见表2。

表2 优化参数在不同工况下适应性Tab.2 Adaptability of optimized parameters under different conditions
表2的结果表明:本文所提策略适用于不同位置的直流闭锁、不同功率水平的直流闭锁、不同负荷水平的运行方式及不同开机台数的运行方式。本例中所有工况下机组的调频性能以及大网系统的频率阻尼比均得到显著的改善,验证了本文优化策略的有效性;同时表明更大的Kd能够在一定程度上提升机组的调频特性。此外,表2及更多的测试反映了以下现象,可进行进一步的研究:①在同样的负荷水平及功率不匹配工况下,开机越多系统的阻尼特性越差;②更大的Kd能稍微改善调频性能,但实际运行中需考虑与抑制低频振荡效果权衡。
5 结论
本文分析水电机组PID各参数对超低频振荡现象的影响,提出了一种能对全网水电机组PID参数进行多机协调优化的策略,并在云南电网实际系统中进行仿真验证。主要结论如下:
a)比例系数Kp、积分系数Ki基本只影响超低频段的系统响应,而微分系数Kd则同时对低频段造成较大影响。应保证低频振荡能够满足要求的前提下,Kd越大越好;但更大的Kd对超低频振荡的抑制效果有限,实际运行中需权衡Kd的取值。
b)若允许某些机组承受较大的波动,则可以改善整个电网的阻尼特性及其余机组的调频性能;反义亦然,若需要全网所有机组均达到较好的调频指标,则需要某些调节量较少的机组承担较多的功率波动,从而实现对波动过大的机组的调频改善。
c)利用本文的优化策略,可以实现云南电网的所有机组扰动后,能够在短时间内进入稳态,系统频率能够迅速恢复稳态,避免存在有些机组波动过大而一些机组基本不调频的现象。本例中各种工况下的调频性能均得到有效的优化。
d)应用本文的搜索策略,计算次数与机组台数基本成线性关系,计算复杂度略高于O(n)而远小于O(n2),因此本文所提的优化策略具有现实可用性。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
能源工程(2021年5期)2021-11-20
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
消费导刊(2017年24期)2018-01-31
山东工业技术(2016年15期)2016-12-01
魅力中国(2016年7期)2016-05-14
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18
