基于单片机的变电站智能巡检机器人的设计
2019-12-04 09:22孙浩张晋莱李姿
卫星电视与宽带多媒体 2019年13期
孙浩 张晋莱 李姿
【摘要】随着时代的发展,人工智能产品的使用越来越普及。此次设计的基于STC89C52RC单片机的变电站智能巡检机器人就可以通过检测变压器温度的数据检测来实现对变电站设备的检测。视频模块可以控制机器人的行动。红外循迹及避障模块使机器人按照规划路线行驶。
【关键词】变电站;视频传输;智能控制;温度传感器
1. 設计背景
由于无人值班变电站增多,许多变电站地处偏远的地方,人工巡检人员多有不便,而且,人工巡检人员心理上,生理上,外部工作环境,工作经验等原因,可能会存在对设备漏巡,漏检等现象。所以变电站智能巡检机器人的设计就可以极大的解决这些问题,比如设备特殊部位发热等缺陷,将大大减少人员工作量,并产生经济效益。
2. 设计原理
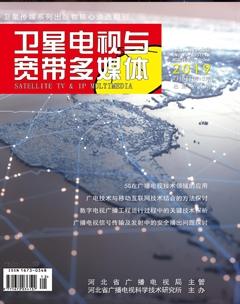
本次设计是以STC89C52单片机为核心的变电站智能巡检机器人设计,该设计利用了视频传输模块、声音传感器和温度传感器,各个模块和传感器电路通过单片机的编程和上位机来实现对变电站智能巡检机器人的智能控制,此次设计中将变压器工作状态作为检测量,由单片机分析采集到的数字温度信号来对机器人进行控制。从而达到无须人为控制便可自动巡检的效果。变电站智能巡检机器人系统框图如图1所示。
此次设计的控制部分采用了STC单片机作为系统的控制核心。STC89C52RC是STC公司生产的一种低功耗、高性能CMOS8位微控制器,STC89C52RC可以为本设计提供良好的控制效果,和使功耗达到最低所以选择此单片机作为控制核心。
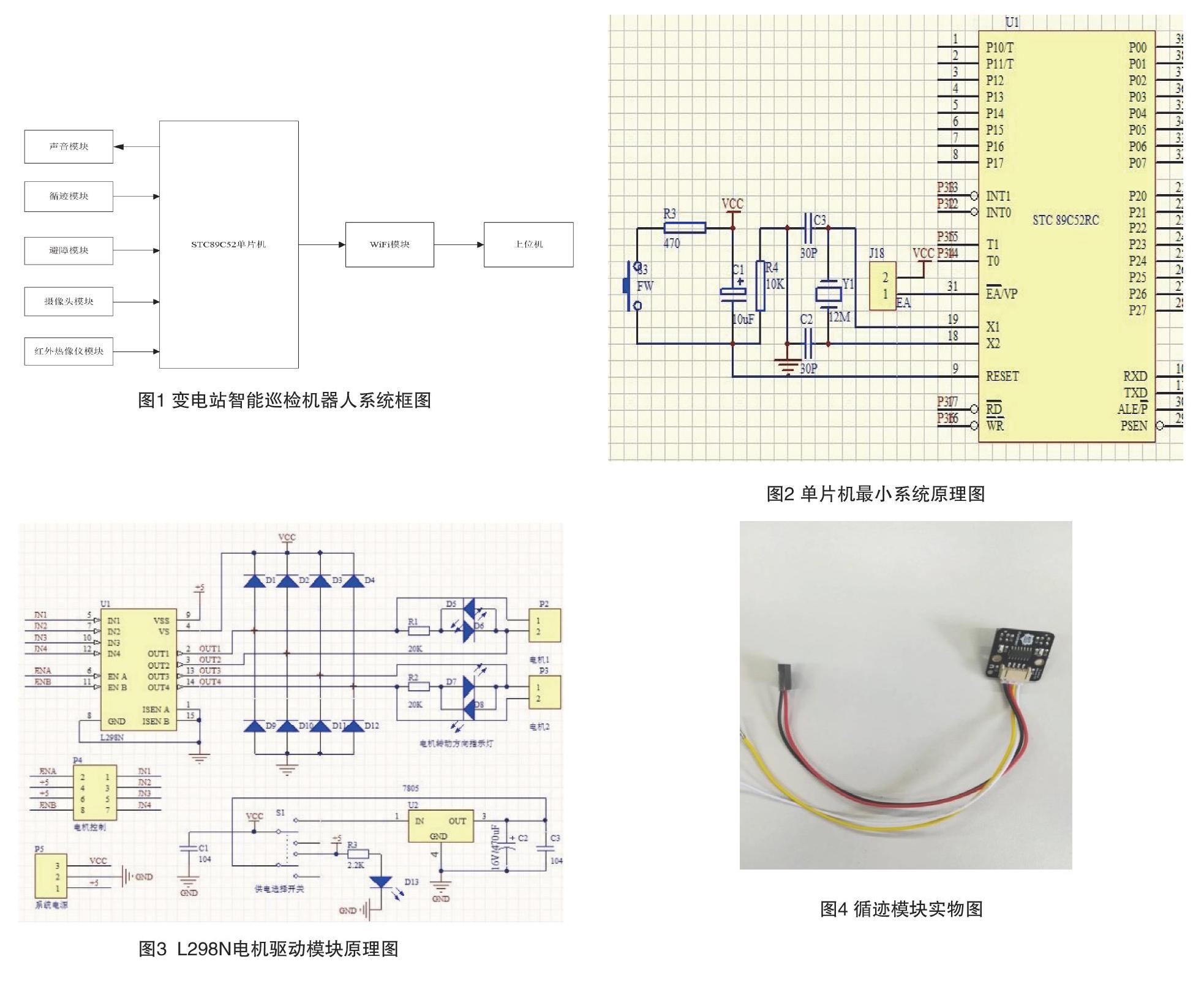
STC89C52RC单片机最小系统是由复位电路、时钟电路和电源电路组成。只有这三部分基础电路完善,单片机才能良好的运行和使用。单片机最小系统原理图如图2所示。
避障部分中,是使用了红外线检测模块,该模块是通过发射红外线光来使感应传感器检测机器人与障碍物的距离。当传感器接收到红外线反射信号的距离过短时。就会生成低电平发送信号给单片机。单片机接受信号并控制机器人进行停车,误差范围为±2cm。L298N电机驱动模块原理图如图3所示。
当在机器人在运行过程中避障模块检测到有障碍物位于机器人前进方向,机器人会根据程序的指令执行避障操作:机器人停止运行直到障碍物挪开。模拟如果有人员挡在机器人前机器人暂时停止。
在循迹部分中,我们使用了两路循迹传感器,当发射出的红外线出现在检测范围内时,红外线被反射回来且强度足够大使红外接收管饱和,此时模块的输出端为低电平,开始循迹。循迹模块实物图如图4所示。
当红外光检测到黑线,传感器采用施密特触发方式执行循迹操作:使机器人在规划路线里自动执行检测操作。
3. 结论
在此机器人设计中。在实际测试使用的过程中,机器人经过了多次的调整相应位置和改进,使反馈信号更加完美,它可以完成操作人员发送给机器人的各种控制指令,并能控制机器人进行良好的检测状态。此次设计的变电站智能巡检机器人是一套完好的控制系统,可以使机器人进行独自运行,并可以通过上位机来控制机器人进行下一步运转,具有良好的操作空间。
参考文献:
[1]冯成龙,刘洪恩.传感器应用技术[M].北京:清华大学出版社,2009:22.
[2]谭永宏,张辉. 智能寻迹小车的研究与设计[J]. 微计算机信息. 2008(08).
作者简介:孙浩(1999—),男,黑龙江双鸭山人,学生,现学习电气工程及其自动化专业。张晋莱(1998—),男,辽宁铁岭人,学生,现学习电气工程及其自动化专业。李姿(通讯作者),女,辽宁省沈阳人,沈阳工学院信息与控制学院教师,主要讲授电类基础课和电气专业课程,研究方向电子技术与电力系统自动化。
猜你喜欢
科学与财富(2021年33期)2021-05-10
科学家(2021年24期)2021-04-25
现代职业教育·中职中专(2018年12期)2018-06-11
科技创新导报(2017年14期)2017-08-24
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14