铝锭输送装置悬挂系统的性能分析
2019-12-04 04:12王莉静
价值工程 2019年32期
关键词:铝锭
Performance Analysis of Suspension System of Aluminum Ingot Conveying Device
WANG Li-jing
摘要:本研究利用自动控制原理的时域分析方法,对完成铝锭打包的整垛铝锭输送装置内的悬挂系统输入阶跃信号,通过设计三组弹簧常数k和阻尼系数b,得出三组不同的自由振荡频率ωn和阻尼比ξ,并仿真得出响应曲线,依据响应曲线对该输送装置的性能指标进行分析,确定一种快速、稳定的输送方案。
Abstract: In this study, using the time-domain analysis method of the automatic control principle, the step signals of the suspension system in the whole stack of aluminum ingot conveying device are input. Through the design of three groups of spring constant k and damping coefficient b, three groups of different free oscillation frequency ωn and damping ratio ξ are obtained, and the response curve is obtained through simulation. According to the response curve, the performance index of the conveying device is analyzed, and a fast and stable conveying scheme is determined.
关键词:铝锭;时域分析;超调量;欠阻尼系统
Key words: aluminum ingot;time domain analysis;overshoot;underdamped system
中图分类号:TP2 文献标识码:A 文章编号:1006-4311(2019)32-0180-02
0 引言
近年来,随着我国工业水平的快速发展,铝生产和铝深加工行业取得了长足的进步。目前铝锭行业主要采用铝锭铸造机来完成批量生产,它是通过大型混合炉及流槽将熔融电解铝液铸造成为规定重量熔用的普通铝锭。依据铝锭生产的行业标准,铝锭每垛重量为1080kg,误差为±50kg。[1]传统铝锭生产车间的铝锭垛运输靠人工完成,费时费力,工作效率低,劳动强度大且人工成本较高。[2]另外,当铝锭运输中道路颠簸倾斜较大,铝锭垛层间很容易滑移产生扭曲倾斜,严重的导致绑带断裂散落,而且扭曲倾斜的铝锭难以再次扶正,很容易发生散落事故,产生安全隐患。
针对上述缺点,部分生产企业引入智能化制造车间,将打包好的整垛铝锭通过铝锭输送装置进行运输,设定好目标点位置,无人工参与便可全自动化的实现码垛、打包、运输、输送、信息反馈等功能。该铝锭输送装置结构简单、操作简便、工作状态稳定、效率高,与其他生产线上的设备在运行时协调性良好,完全满足实际的生产需求。
1 铝锭输送装置悬挂系统的结构与原理
铝锭铸造机生产出的重熔用铝锭,往往还需要转运到其他工厂进行下一步加工,为了实现平稳运输和转运时便于装卸,一般都是将铝锭交叉层层叠摞码垛,然后进行打包,运送出库。铝锭输送装置将打包好的铝锭垛放置到输送装置的铝锭承重板上,便可以实现平稳快速的输送出库。其中,悬挂系统的性能会影响整垛铝锭运输的稳定性、快速性和灵敏性。[3][4]铝锭输送装置的悬挂系统是在输送车架与轮胎之间传递力的连接装置。使用弹簧将车架轮胎与运输车身连接在一起,当路面颠簸时,起到减震的效果,在不同的地形条件下具有快速机动性和良好舒适性是悬挂系统性能优越的重要体现。
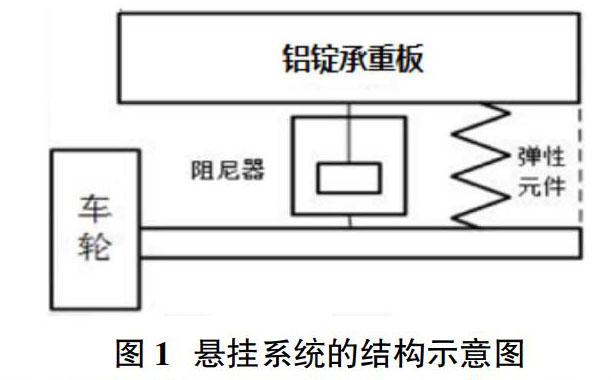
1.1 铝锭传输装置的悬挂系统的结构
铝锭传输装置的悬挂系统由弹性元件、阻尼器和车轮三部分组成,共同来完成缓冲、减震和导向作用,悬挂系统的结构如图1所示。
依据铝锭输送装置悬挂系统的工作原理,通过测试不同路面的减震数据,从系统响应的角度出发,分析悬挂系统快速机动性,合理选择悬挂系统参数。
1.2 动力学分析
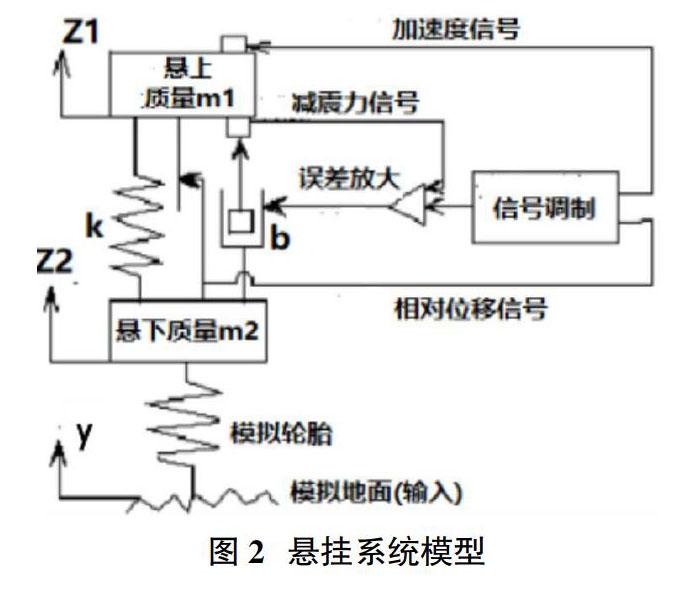
由于铝锭输送装置是四轮结构,我们选用1/4悬挂模型的机械装置来进行分析,它与激励、振动为一体,由磁流变减震器来执行控制阻尼,用位移传感器和加速度传感器采集信号,将采集到的数据用计算机进行处理和计算,针对铝锭垛自重合理选择弹簧、位移傳感器、加速度传感器和磁流变减震器的型号,解决其动力学方面的关键技术。
2 悬挂系统的模型建立与参数分析
2.1 悬挂系统数学模型建立
依据悬架1/4的模型,如图2所示。假设选定模拟一个车轮而忽略其他车轮响应的单自由度系统,根据动力学方程列出等量关系式,从而确定系统的数学模型。[3][4]
其微分方程(1)
其模型为二阶系统。铝锭整垛重量约为1080kg,误差为±50kg,其中fext(t)是地面张力,b为阻尼器的阻尼系数;y为垂直位移量;m表示输送装置的质量;因为输送装置由4个轮子来承载,所以m应为1/4的输送装置的总重量(此模型中不包括车轮质量和轮胎的动态特性)。
为了模拟输送装置在运输铝锭过程中所要行走不同道路的情况,我们选择阶跃信号来表示颠簸路面的情况,地面张力用输入阶跃信号X0来代替。对微分方程进行拉氏变化,可以得到二阶系统的传递函数,其特征方程见式
ms2+bs+k=0 (2)
由特征方程可以得到特征根S1、S2值,其取值与质量m,阻尼系数b,弹簧常数K有关。
对应系统非阻尼振荡运动的角频率为:
2.2 悬挂系统模型的参数分析
由于铝锭输送装置悬挂系统是二阶系统,下面用特征方程的根来
进行系统分析,根据悬挂系统模型的特征根的阻尼情况,对以下四种情况进行讨论:
①无阻尼系统:相对于阻尼器的阻尼系数b=0,输出是正弦与余弦叠加的等幅振荡。
②临界阻尼系统:系统中存在阻尼(b≠0),阻尼比ξ=1。由临界阻尼系数为1,可以得到阻尼器b的阻尼值为:
得到 (5)
用该式可以推到临近阻尼系统的阻尼比
③欠阻尼系统(0<ξ<1):其存在的阻尼小于1,用式(5)可以确定阻尼系数b,推导的位移量的输出为
它与系统的阻尼固有角频率和位移量A、B有关。
④过阻尼系统(ξ>1):同样用式(5)确定阻尼系数b,推导的位移输出与系统的阻尼振荡频率和位移量都有关系。
3 悬挂系统的参数优化
铝锭输送装置悬挂系统的性能,直接影响减震效果。能否对变化的道路提供舒适平稳的要求是评价动态指标的依据。我们选择阶跃响应时域法来分析系统性能,根据阶跃响应的快速性和稳定性进行评价。
3.1 方案设计
方案设计的关键在于设计合理的弹簧常数k和阻尼系数b。设计方案一:k=500 b=10;方案二:k=200 b=20;方案三:k=100 b=10;结合公式(4)和(6)即可计算自由振荡频率和阻尼比的值,方案一:ωn=19.6 ξ=0.2;方案二:ωn=12.4 ξ=0.62;方案三:ωn=9.4 ξ=0.4。
从以上数据可以看出,ξ均小于1,故三个备选方案都属于欠阻尼的状态。
3.2 性能指标分析
现将三组值带入标准的二阶系统传递函数
进行分析:
第一种备选方案将ωn=19.6,ξ=0.2带入式(8),并进行仿真,得到时域的阶跃响应曲线。从响应曲线可知超调量为52%,上升时间为0.09s,最大时间为0.168s,稳态时间为1s(Δ=2%)。词组数据超调量是大于50%的,减震的效果是比较差的。[5][6]
第二种备选方案备选方案将ωn=12.4,ξ=0.62带入式(8),并进行仿真,得到时域的阶跃响应曲线。从曲线上看到动态指标,超调量为8%、上升时间0.23s、最大时间为0.29s和稳态时间0.485s(Δ=2%)。这组数据超调量是小于10%的,有较好的减震效果,响应的快速性也比较好。[5][6]
第三种备选方案将ωn=9.4,ξ=0.4带入式(8),并进行仿真,得到时域的阶跃响应曲线。从曲线上看到动态指标,超调量为25%、上升时间0.23s、最大时间为0.226s和稳态时间0.887s(Δ=2%)。该组值超调量在20%以上,响应的快速性接近于第二种方案。[5][6]
3.3 结论
通过以上参数指标的性能分析,得知第一种方案:阶跃响应1S后就可以达到稳态值,且幅度有交大振荡,超调量大,悬挂系统未能良好的抑制地面的颠簸情况。方案二:阶跃响应在0.5S后就达到了稳态值,超调量小,悬挂系统能够有效的抑制地面的颠簸情况,确保了铝锭输送的快速平稳。方案三:阶跃响应在0.9S后就达到了稳态情况,超调量比方案二要大,比方案一要小,平稳效果介于两种方案之间。
通过三种方案比较,可以看到方案二响应速度快,到达稳定的时间比较短,超调量小,使系统的阶跃响应能够快速稳定,抗震的效果也比较好,它应该是一种最佳的方案选择。
4 结束语
通过对上述铝锭输送装置悬挂系统的性能分析可知,超调量过大,会造成振荡次数增加,铝锭输送装置运动不平稳,系统会花更多的时间调整才能达到稳定。如果想要较小的超调量,则会使输送装置反应迟钝。因此,通过自动控制理论中的时域分析法对该系统输入阶跃响应进行性能分析,选择合适的和,就可以保证铝锭快速、稳定的运输出库。
参考文献:
[1]王莉静.基于PLC控制的铝锭在线计量系统的设计[J].济源职业技术学院学报,2018(03):34-40.
[2]王莉静.西门子PLC模块化设计在铝锭打码系统中的应用[J].三门峡职业技术学院学报,20198(02):68-72.
[3]王朝晖.机械控制工程基础[M].西安:西安交通大学出版社,2018.
[4]杨叔子,杨克冲,吴波,熊良才.机械控制工程基礎[M].武汉:华中科技大学出版社,2017.
[5]姜增如.自动控制理论创新实验案例教程[M].北京:机械工业出版社,2015.
[6]姜增如.自动控制理实验[M].北京:北京理工大学出版社,2010.
作者简介:王莉静(1983-),女,河南三门峡人,三门峡职业技术学院机电工程学院讲师,研究方向为机械制造及自动化。
猜你喜欢
轻合金加工技术(2022年4期)2022-12-28
云南科技管理(2022年5期)2022-11-23
轻合金加工技术(2021年9期)2022-01-01
中国有色金属(2021年5期)2021-03-30
商品与质量(2020年23期)2020-11-26
安徽电子信息职业技术学院学报(2020年2期)2020-05-13
化工管理(2020年15期)2020-01-13
中国金属通报(2019年8期)2019-09-12
世界有色金属(2019年14期)2019-02-10
机电工程技术(2018年4期)2018-02-17