
有航速纵向连接多联浮体频域特性分析
2019-12-03 10:50:32陈徐均苗玉基
舰船科学技术 2019年11期
魏 枭,陈徐均,苗玉基,2,黄 恒
(1.陆军工程大学 野战工程学院,江苏 南京 210007;2.中国船舶科学研究中心,江苏 无锡 214082)
0 引 言
海上浮式栈桥桥节(桥段)在从深水到浅水浮运过程中会遭遇不同方向的来浪,为提高拖航效率可能会把几个浮体单元纵向串联在一起拖航,串联在一起的多个浮体在多大的航速可以安全通行就显得尤为重要。对不同水深、不同浪向以及不同航速下纵向连接多联浮体的水动力特性研究是上述安全性分析的基础,是一种特殊连接方式的多浮体水动力分析,国内外相关研究包括多体动力学分析、多浮体水动力分析和航行浮体的水动力特性分析等。多体动力学分析方面,Michel G.和Daniel J.R.[1]提出了一种将弹性体变形的自由度公式与线性振动的脉冲基描述相结合的柔性多体动力学方法;Marcel E.和Jurnan S.[2]提出了一种新的柔性多体系统动力学方程;Lee H.W.等[3]提出了基于有限元的适用于多体系统的系泊线模型。多浮体水动力分析方面,Zhao H.等[4]采用随机波频域法对两模块浮式平台进行了动力分析;Yang S.H.等[5]提出了一种浮动多体的波能转换器,求解浮式多体系统的幅频响应;韦斯俊等[6]对浮体间相互作用对水动力性能的影响进行了研究;张周康和洪亮[7]对浮体系统进行了不同海况的预测和设计优化。航行浮体的水动力特性方面,苗玉基等[8]分析了带航速三体渡驳在波浪中航行时的水动力特性,以及航速和环境因素对其幅值响应算子的影响;陈振纬等[9]应用三维势流理论的水动力软件AQWA分析了一种新型工程船舶在波浪中的运动响应;李鸿等[10]利用AQWA软件对不同海洋环境下的系泊多浮体耦合系统进行了全耦合时域分析,得到浮体的运动响应和缆绳受力情况。
本文基于三维势流理论,利用水动力商业软件Ansys-Aqwa对有航速纵向连接多联浮体的水动力特性进行数值计算,主要对纵向连接多联浮体在不同水深条件、不同浪向角和不同航速下的运动幅值响应算子RAOs(Response amplitude operators, RAOs)随波浪频率的关系进行分析。本研究可为浮体的拖航、运输提供一定的借鉴和指导,并为后续的时域分析奠定基础。
1 计算原理及方法
假定有航速的纵向连接多联浮体所处的流场为无黏无旋不可压缩的理想流体。因此,流场的运动可以采用三维势流理论来描述。流场的边界由物面边界,流体自由表面,海底边界面和无穷远处柱面构成,有航速的多联浮式结构周围流场的速度势由定常速度势和非定常速度势组成,可表示为[11]:



绕射势与辐射势均满足拉普拉斯方程可在相应的边界条件下采用格林函数法[12]求解。



浮体的频域运动方程为[11]:

利用式(10)求得纵向连接多联浮体结构的附加质量和附加阻尼,与波浪激励力一起代入运动方程(11),即可求出纵向连接多联浮体结构的运动响应。
2 数值模型
本文研究的纵向连接多联浮体结构是由2个浮运高架结构单元通过铰接接头连接而成的,分别将2个浮体命名为S1与S2,其计算模型及坐标系定义如图1所示。通过改变不同的水深、浪向角与航速分别对浮体结构进行水动力计算。设水深分别为10 m,8 m,5 m,3 m 和 2 m,浪向角分别为 0°,30°,45°,60°,90°和 180°,航速分别为 0 m/s,1.0 m/s,2.0 m/s,2.5 m/s和3.0 m/s时,对多联浮体结构进行频域特性分析。
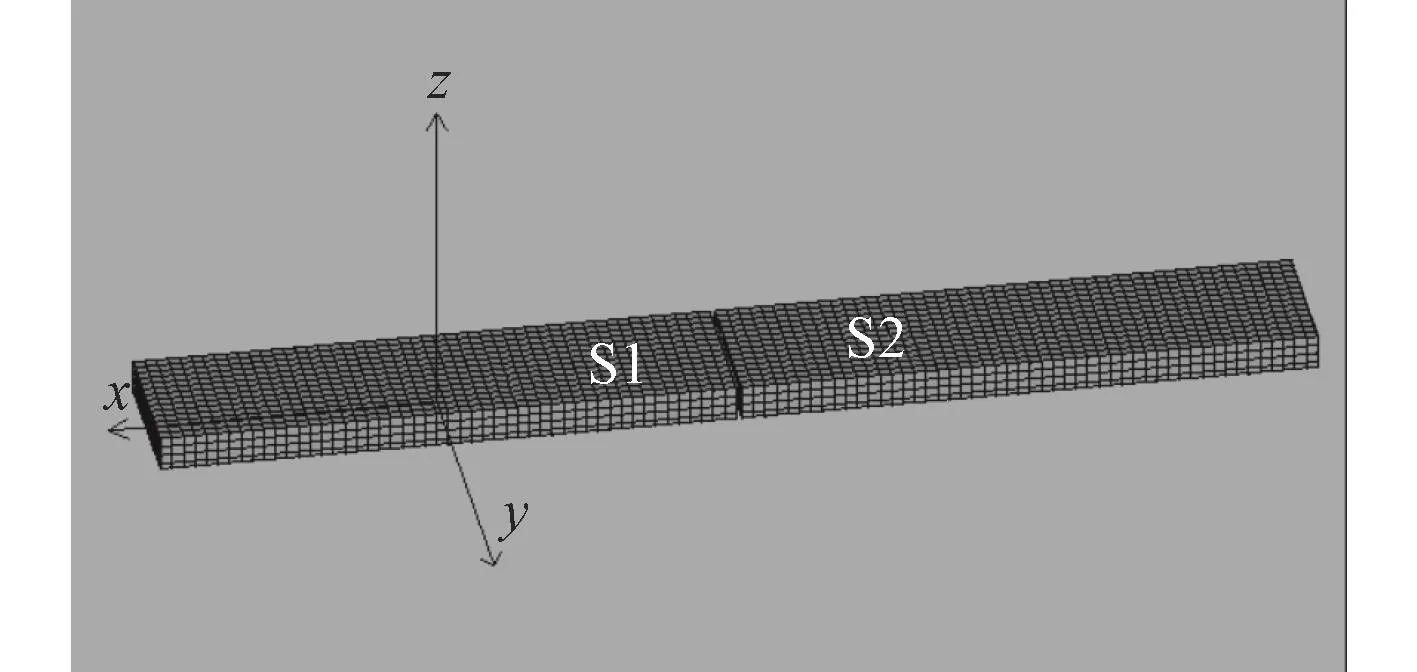
图1 浮式结构网格划分Fig.1 Floating structure meshing
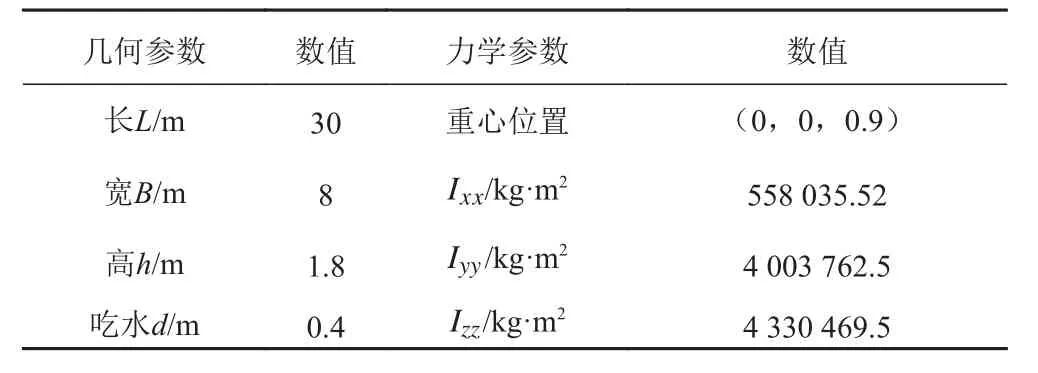
表1 浮式结构几何参数与力学参数Tab.1 Geometric and mechanical parameters of floating structures
3 计算结果与讨论
垂荡、纵荡与首摇对纵向连接多联浮体航行的影响较大,因此本文仅对此3个自由度进行讨论。
3.1 水深对RAOs的影响
在研究水深对RAOs的影响中,本节设定2.5 m/s航速,0°和30°浪向,分别对2 m,3 m,5 m,8 m,10 m和无限水深的情况下进行数值模拟计算。由于0°浪向时对首摇RAOs不会产生影响,因此在本节0°浪向只对垂荡与纵摇进行讨论。
图2和图3分别为0°与30°浪向下浮体S1在不同水深时RAOs随波浪圆频率变化曲线。各浪向的垂荡RAOs在频率趋于0 rad/s时均趋于1,总体上垂荡RAOs随着水深的增加而增大,峰值周期也随之增大。纵摇RAOs在低频段随着水深的增加而减小,在中频段随着水深的增加而增大。30°浪向的首摇RAOs在中低频段随着水深的减小而增大,在高频段趋于稳定。在频率小于0.3 rad/s时会引起较大的首摇RAOs,特别是水深小于5 m时会引起30°~40°的首摇RAOs,应引起重视。

图2 不同水深下垂荡和纵摇RAOs随频率变化曲线(0°浪向,航速u=2.5 m/s)Fig.2 RAOs curves of Heave and Pitch with frequency at different water depths(0 degree wave direction,speed u = 2.5 m/s)
由图2和图3可以发现在8 m水深处各自由度RAOs值与无限水深时相比差别不大,因此对于本文研究的纵向连接多联浮体,8 m以上水深可以看作无限水深进行分析和计算。由于浅水效应的存在,在5 m水深内会导致浮体纵摇RAOs与首摇RAOs偏高,因此在5 m水深内航行时应注意多联浮体的运动响应。
3.2 浪向对RAOs的影响
在研究浪向对RAOs的影响中,本文设定2.5 m/s航速,5 m 水深,对 0°,30°,45°,60°,90°和 180°浪向进行数值模拟计算。图4为浮体S1在不同浪向时RAOs随波浪圆频率变化曲线。
由图4(a)可见,垂荡RAOs各浪向在频率趋于0 rad/s时均趋于1,并在90°浪向范围内随着浪向角的增加而增加。
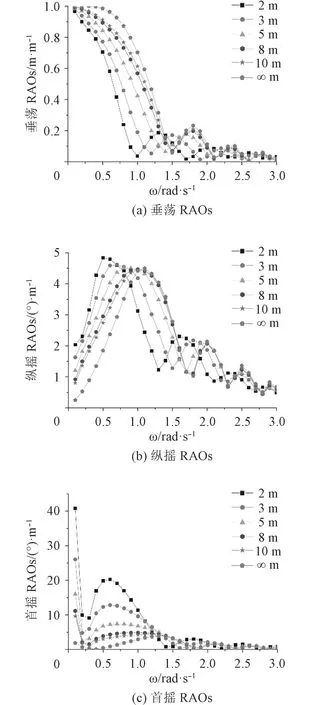
图3 不同水深下垂荡、纵摇和首摇RAOs随频率变化曲线(30°浪向,航速 u=2.5 m/s)Fig.3 RAOs curves of Heave, Pitch and Yaw with frequency at different water depths (30 degree wave direction,speed u = 2.5m/s)
由图4(b)可见,纵摇RAOs在低频段存在一个最大值,此最大值在90°浪向范围内随浪向角的减小而增大。
由图4(c)可见,首摇RAOs主要在斜浪向条件下会产生较大的响应,尤其是在频率小于0.3 rad/s时会产生20°左右的首摇应引起重视,在0.3~2.0 rad/s频率段,斜浪向的最大首摇角也可达6°~8°,首摇响应在频率变大时趋于稳定。
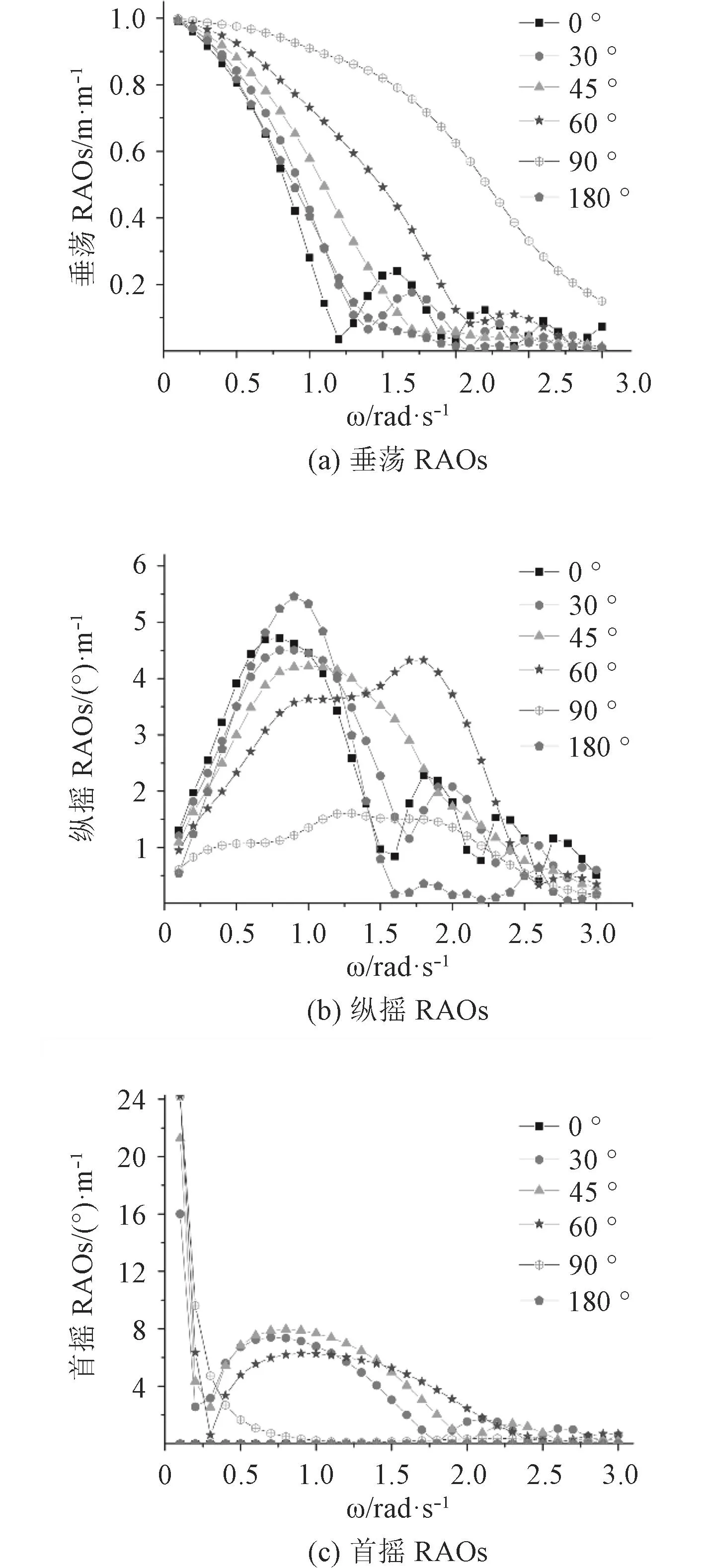
图4 不同浪向下垂荡、纵摇和首摇RAOs随频率变化曲线(水深5 m,航速u=2.5 m/s)Fig.4 RAOs curves of Heave , Pitch and Yaw with frequency in different wave direction (depth 5 m, speed u = 2.5 m/s)
综合图4及相关分析得出如下结论:垂直浪向(即90°浪向)航行时应多注意多联浮体的垂荡;在迎浪(0°浪向)与顶浪(180°浪向)航行时应多注意多联浮体的纵摇,在以其他浪向航行时,应多注意多联浮体的首摇。不同航向对应不同的波向角,因此,在纵向连接多联浮体拖航过程中,可通过适当改变航向来减小某个自由度过大的响应。
3.3 航速对RAOs的影响
在研究航速对RAOs的影响中,本文设定30°浪向,5 m水深,分别对0 m/s,1.0 m/s,2.0 m/s,2.5 m/s和3.0 m/s航速进行数值模拟计算。图5为浮体S1在不同航速时RAOs随波浪圆频率变化曲线。可见,垂荡和纵摇RAOs受航速的影响较小,首摇RAOs随航速的增加而增加,因此应尽量避免高航速拖航。
4 结 语

图5 30°浪向、5 m水深不同航速下各自由度RAOs变化曲线Fig.5 RAOs curves of degree of freedom under different velocities of 30 degree wave direction and 5 m water depth
本文研究了有航速纵向连接多联浮体的水动力特性,对比分析了水深、浪向及不同航速对浮体运动幅值响应算子的影响。通过对计算结果的分析得到以下结论:
1)水深对有航速纵向连接多联浮体的运动响应影响较大,水深越浅,浮体的垂荡RAOs越小,但在一定的频率下会导致浮体纵摇与首摇产生较大的RAOs值。总体上,若在浅水中频浪中航行,纵摇会随着水深的减小而减小,而首摇不会产生过的RAOs值,是比较有利的。
2)垂直浪向(即90°浪向)航行时应多注意多联浮体的垂荡;在迎浪(0°浪向)与顶浪(180°浪向)航行时应多注意多联浮体的纵摇,在以其他浪向航行时,应多注意多联浮体的首摇。在纵向连接多联浮体拖航过程中,可通过适当改变航向来减小某个自由度过大的响应。
3)航速对纵向连接多联浮体垂荡和纵摇RAOs影响较小,但对首摇RAOs的影响较为明显。总体上航速越低,运动响应越小,所以拖航时的航速不宜过高。考虑到高频段运动响应明显小于中频段,在波频较高,即波长不大时可适当提高航速。
猜你喜欢
人民长江(2023年6期)2023-07-25 12:24:14
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
云南化工(2021年5期)2021-12-21 07:41:52
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
建材发展导向(2019年10期)2019-08-24 06:24:52
水利与建筑工程学报(2018年4期)2018-08-21 07:47:54
舰船科学技术(2018年7期)2018-07-25 06:30:18
石油化工建设(2018年2期)2018-07-11 01:24:58
