
感应电机弱磁控制研究
2019-12-02 01:11:00吴昭玄李启东童乔凌
微电机 2019年10期
吴昭玄,刘 涛,李启东,童乔凌
(华中科技大学 光学与电子信息学院,武汉 430074)
0 引 言
弱磁控制通过一定的控制策略,合理分配转矩电流和励磁电流,进而尽可能地提升电机的速度,是目前适用范围最广的感应电机提速方法[1],目前常见方式有:①1/ωr法,此方法是一种开环的弱磁算法,很难在控制过程中非常准确地分配励磁电流的大小,所以无法使电机的转矩性能和速度性能发挥到最佳[2]。②基于电压闭环的弱磁控制算法[3],该方法能有效地降低对电机参数的依赖,鲁棒性较好,且在整个运行过程中电机可以获得最大的转矩输出,但是这种策略增加了两个PI环,工程实践上调试复杂,不方便实施。本文提出了基于漏磁系数的改进型电压闭环的弱磁控制算法,只需要电机的漏磁系数,结合电压闭环的弱磁算法就能很好地分配转矩电流与励磁电流,可以在带载下使电机有较高的速度,这种算法能在传统的电压闭环弱磁算法的基础上减少一个PI环,易于整定,方便工程实践应用。
1 基本感应电机控制原理
感应电机矢量控制中,转子磁场定向方式比较易于实现,因而比较常用,本文也是采用这种控制方法。
由于直流电压侧给的数值是一定的电机转动的转速越大,由此产生的反电动势越大,使得可用于产生转矩的电压余量就会变少。在转矩分量位于可接受的范围内,如果想要获得更加宽范围的调速,即在额定转速以上还维持恒功率运行,需要保证电机在弱磁时,保持一定的转矩,不让其下降很快。需要对电机进行弱磁,并对控制理论进行分析研究。
感应电机的转矩方程[4]可由以下的方程决定:
(1)
(2)
稳态的时候,电机电压的方程如下:
usd=Rsisd-ωsσLsisq
usq=Rsisq-ωsLsisd
(3)




(4)


图1 电流电压圆示意图
2 电机在不同速度情况下的理论分析
随着电机速度上升,电机运行在不同的状态,具有不同的特点,可以划分为3种状态:恒转矩、恒功率、恒电压,如图2所示。

图2 运行状态示意图
(1)恒转矩状态(低于基速时):当电机的速度低于额定转速时,由于用到的矢量幅值低于Usmax,所以,可以提供最大的驱动器所允许的Isqmax,在此种状态下,电机的运行只受到电流圆约束的影响。
(2)恒功率状态(高于基速低于ω1时):此时所需的电压为Usmax,若想继续增大电机速度,所需的电压幅值将超过Usmax。此时若不利用一定的方法,那么电机的转速,将由于作用在定子端的电压无法支撑当前的反电动势,而不能继续增加。这种情况下,能达到的最大转矩受到两个圆限制条件的影响。
假设当电机到达基速时,此时在X点上,现在希望以X-Y-Z这个趋势运行,来保证产生最大的转矩。此时由于励磁电流减小,转速也在不断提高。在这个状态,电机运行在电压圆和电流圆的交点,都是最大的情况,所以功率不变,因此又将这个状态称之为恒功率区。
(3)恒电压状态(高于ω1时):随着速度继续上升,电机运行只受电压圆方程的约束,沿着X-Y-Z方向运行。此时的励磁电流分量和转矩电流分量都是处于减小的趋势,而转矩正比于这两个分量的乘积,因此转矩一直下降,此时已经无法按照恒功率运行,由于电压一直处于最大值且固定,所以这种情况称之为恒电压状态。
三种运行状态的电压电流圆示意图如图3所示。

图3 电流电压示意圆
3 弱磁算法分析
根据对常用的弱磁控制策略的分析,1/ωr法是一种开环的弱磁算法,适用于对动态响应要求不高以及调速范围不宽的情况;电压闭环的弱磁控制算法首先由Sang-HoonKin提出,但是这种方法有5个PI环需要整定,给实际应用增加了难度,调试有困难,现在提出一种基于电机参数的方法[6-7],既可以利用电压闭环的弱磁控制算法的优点,又能通过准确测得的电机参数使得系统减少一个PI环,从而简化系统的复杂度。
在电压闭环弱磁算法的基础上,电压圆的方程可以改写为
(5)
在恒电压状态,电机的运行只受到电机的电压圆方程的约束,则力矩方程为
(6)
求力矩方程的最大值的问题可以归结为采用拉格朗日乘数法求解含有不等式约束的最优化问题,以力矩方程为目标函数,电压源方程为约束条件,令:
上式表明,恒电压状态下,当满足上式关系时,力矩可以取得最大值。漏磁系数起到了分配励磁电流isd与转矩电流isq的桥梁的作用。只要得到漏磁系数的值,就能基于其实现电压闭环弱磁控制。


图4 基于漏磁系数的电压闭环弱磁算法原理框图
下面通过3个常用的感应电机的参数测量方法[6,8-9],来得到这些数值,分别是直流实验、无载实验及堵转实验,直流实验可以测得定子电阻rs,无载实验可以测量定子电感Ls,堵转实验可以测量定子电阻与转子电阻之和(rs+rr)以及定子漏感与转子漏电感的和(Lls+Llr),通过无载实验可以求出互感值Lm。
只要得到漏磁系数的值,就能基于漏磁系数实现电压闭环弱磁控制.在不同的状态下,分析运用本方案电机运行的理论情况[10]:
(1)在恒转矩状态下,由于只有电流圆的约束,励磁电流可以给到允许的额定值,且力矩电流也能根据实际的带载情况增加到最大转矩点对应的电流。则励磁电流与转矩电流的情况分别如下:
(7)
(2)在恒功率状态下,由于此时电机的速度已经达到或者超过额定速度,这时合成的电压矢量已经超过最大的电压矢量的幅值Usmax,为了退出这个饱和的状态,系统根据PI_1来使得isd逐渐降低,从而维持合成的电压矢量不会一直超过Usmax,在这个区域,usd会变化以调节励磁电流,由于isd的减小,isq将会增加。在这个状态下,isd通过PI_1来自动适应整个系统,isq如下:
(8)

4 系统仿真与分析
为了验证前几节提出的理论的正确性,接下来在Matlab仿真工具Simulink中进行对系统进行理论仿真[11].首先对SVPWM的理论进行验证[13],再对感应电机的矢量控制和弱磁控制进行仿真。
在Simulink中,搭建了基于感应电机的带有弱磁控制的仿真模型,仿真用到的电机与实际一致,从铭牌得到如下参数:额定功率为3 kW,母线电压为60 V,额定电流为65 A,额定转速为6000 r/min。另外通过离线参数辨识,确定电机的转子电阻为0.01107Ω,定子电阻为0.04415Ω,漏感为0.02 mH,定子电感约等于转子电感为 0.155 mH。
空间矢量脉宽调制技术(SVPWM)是PWM调制的一种,是基于逆变器的三对互补的功率开关器件,通过一定规律的开关模式产生的脉宽调制波,最终使输出电流波形达到标准的正弦波形。
13.1 采收标准:菌盖边缘白色生长圈(点)完全消失;菌盖表面完全呈赤红色,不再增大;菌盖表面色泽一致。
为了对比,我们首先搭建不含弱磁的仿真模型,如图5所示。
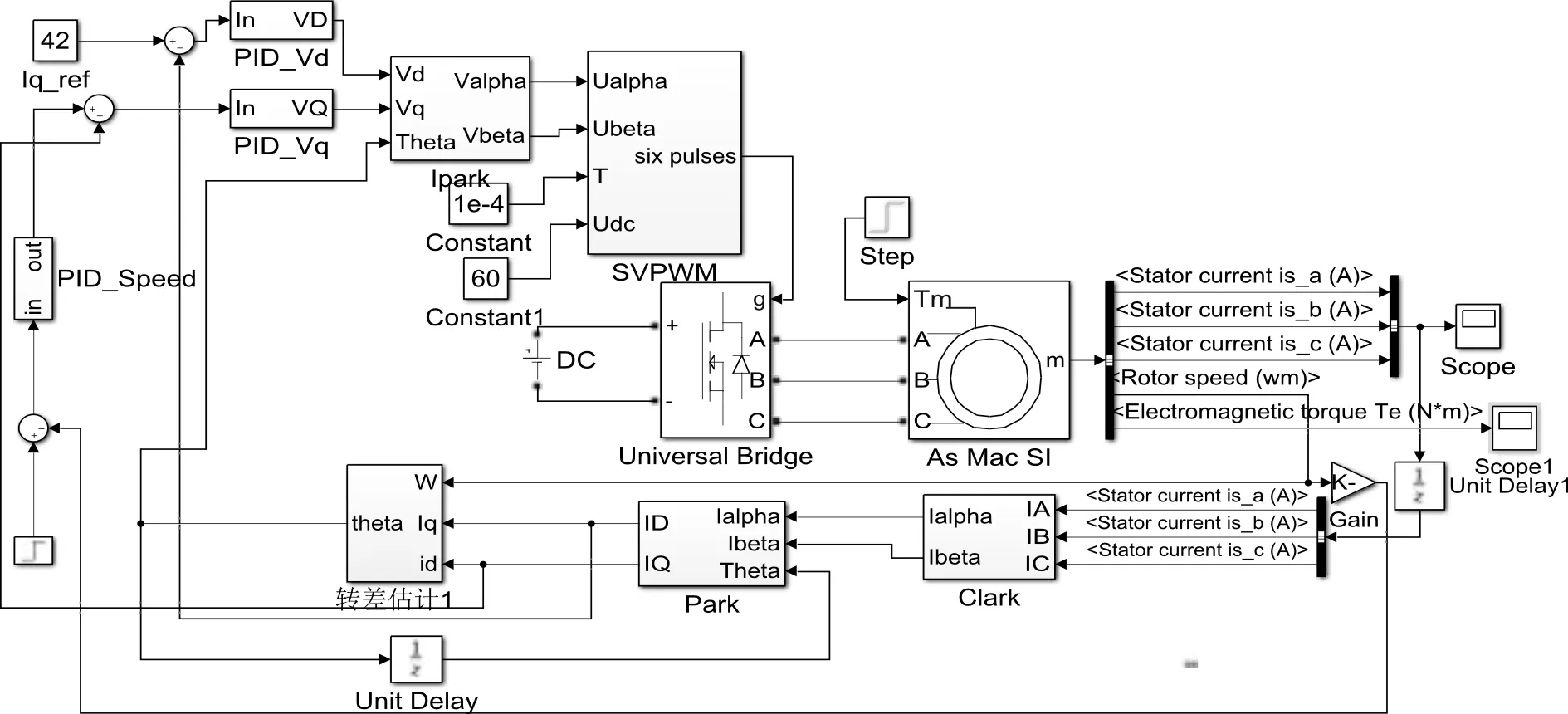
图5 不含弱磁的仿真模型
给定速度为5900 r/min,负载阶跃,初始值5 Nm,1 s时变为15 Nm。仿真波形的记录如图6、图7所示。从速度的波形图可以看出,当未加弱磁控制策略时,电机的速度一开始从0一直上升至5900 r/min,后由于d轴电压和q轴电压提前饱和,使得力矩电流无法一直维持较大的值,最后速度达到极值维持一段时候后急剧下降,如图6所示,证明此时实际带载能力已经不够。速度无法到达给定的5900 r/min。

图6 转速图像

图7 三相电流图像
为了测出电机在何时需要弱磁,将给定转速逐步下降进行测试,发现当给定转速2900 r/min时,电机跟得上给定速度,且具备一定的带载能力。此时电流波形如图7,仿真可以发现感应电机的起动电流要比平稳运行时的电流大的多,在实际测试中也是同样的情况,这是因为感应电机运行时存在转差,而电机刚起动时转差是最大的情况,即转差率为1,所以此时会产生很大的起动电流。


图8 励磁电流给定仿真搭建图
之前已经分析过,当d轴电压与q轴电压的平方和开根号大于Usmax,则认为进入了弱磁控制的区域,图9(a)为确定励磁电流的仿真搭建图。可以看出,励磁电流的给定等于没有弱磁情况下的励磁电流加上经过比较以及PI环后产生调节值。其中PI环输出的最大限幅值为0,最小限幅值为-35。

图9 仿真搭建图
按照之前的理论分析,比较基于漏磁系数给出的转矩电流,与基于反馈的励磁电流和最大电流限制得到的转矩电流,将较小的一方赋给最终的转矩电流限定值,电路仿真搭建如图9(b)所示。
在同一个示波器上观察不同算法情况下的速度仿真波形,如图10所示,给定速度5900 r/min,对于未加弱磁控制,电机的平衡时的速度达不到给定值(一开始达到了,一方面是因为初始给的负载较小,另一方面是PI参数给的比较大);对于传统的基于速度的弱磁控制算法,可以达到最大给定速度,且后面的速度可以一直维持给定速度,证明了传统的弱磁算法的可行性。但是因为其对电机转矩电流和励磁电流的分配相当于是一种开环控制方式,在2.5 s至2.75 s之间电机的转速存在细微抖动,如图11;本文提出的弱磁控制方式是基于电压闭环的,对转矩电流和励磁电流的分配相对合理,所以不会出现抖动的情况。

图10 三种方案转速仿真波形对比
另一方面从图11可以清楚地看到,传统的弱磁控制算法的提速效果没有本文提出的弱磁控制算法好,本文提出的弱磁控制算法,在电机运行至1.6 s左右达到最大速度,比传统的弱磁控制算法快了0.6 s左右,提升效果达到28%。

图11 速度抖动情况对比
5 驱动器软硬件平台的实验与验证
在完成理论仿真之后,搭建了实际的电动汽车驱动器的软硬件平台,对于硬件平台,着重叙述了硬件平台的总体架构和重要模块的电路组成。对于软件平台,着重叙述了电动汽车的软件流程,以及各个模块的功能。
驱动器硬件平台的总体结构可以概括为图12,实际应用中,将以下模块分成两块电路板。一块是控制板,主要包括CPU,开关电源电路,采样电路,通信电路等模块,另外一块是(驱动板)铝基板,主要是驱动电路,逆变电路等模块,其中驱动板的材质采用铝基板的主要原因在于,对于驱动板上的MOS管,在电机正常运行或者带载时,会通过很大的电流,采用铝基板可以较快地散热。

图12 驱动器硬件系统示意图
软件的编写基于CCSv6.0软件平台,利用电机控制理论的相关知识,并结合TI的官方例程[15-16],软件框架如图13所示,工程栏界面可以清晰地看到软件架构的树形图。图14为实际电路板,图中的柱子,上面两个用来走母线电流,下面三个用来走相电流.图15为测试的连线图,图16为实际带车测试环境,所用的电动汽车采用后驱驱动。

图13 软件框架

图14 电路板

图15 测试连线图

图16 实际带车测试环境
首先验证调制方式以及磁通估计器的正确性,与理论和方针相符。接着通过测功机来测试电机的速度和转矩情况,由于所用的电流探头以及连接线的限制,测功到17 Nm的电流转速转矩对应关系,测功机的带载曲线如图17所示。

图17 测功机的带载曲线
从图17可以看出:随着加载的上升,母线电流逐渐平缓上升。在很小的负载时,电机的速度达到了5400 r/min以上,说明弱磁算法已经奏效,并且随着加载的进行,速度没有出现陡降的情况,而是随着加载转速缓慢下降,并且没有出现毛刺等不应该出现的现象,证明了本文的弱磁算法在实际运行时的可行性,且电机的最大效率有92%,对于感应电机效率已经满足要求,试验的结果与上文的理论分析相符。
猜你喜欢
河北电力技术(2021年2期)2021-07-29 09:16:30
电子制作(2018年1期)2018-04-04 01:48:34
制造技术与机床(2017年6期)2018-01-19 02:41:07
大电机技术(2017年3期)2017-06-05 09:36:02
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
电源技术(2015年9期)2015-06-05 09:36:06
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12
水电站机电技术(2014年4期)2014-10-13 08:30:07
