
基于PI-QPR控制的双向变流器并网研究*
2019-11-26 07:55王继虎
重庆工商大学学报(自然科学版) 2019年6期
王继虎, 梁 喆
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引 言
三相电压型双向变流器因其主电路拓扑及控制系统简单,且具备单位功率因数校正和功率双向流动等优点在以新能源为基础的微电网得到广泛应用。目前,三相电压型双向变流器的控制策略主要有PI控制、无差拍控制、滞环控制等技术[1-2],PI控制具有算法简单和可靠性高的特点,被广泛应用于工业控制,但常规的PI控制对正弦参考指令却难以达到理想的控制效果[3]。滞环控制具有动态响应快和实现简单的特点,但是控制精度、损耗及开关频率会随着滞环宽度的变化而变化。无差拍控制虽然控制效果较好,但是对系统传感器的精度要求较高,控制过程中运算量较大,结构复杂不易实现[3]。
PR控制是在PI控制基础上提出来的,其具有无静差跟踪交流指令的优点,但是它对基波频率的精确度要求较高,不易于物理实现,在其基础上改进的QPR控制能够很好地弥补PR控制的不足,而且实现起来更加方便[4]。为了获得更好的控制效果,将PI控制与QPR控制相结合对双向变流器进行控制,控制环路中,电流内环采用QPR控制器,目的是实现对输入电流的无静差跟踪,电压外环采用PI控制器,实现负载突变时对直流侧电压控制的快速性,减小对电流内环控制的影响。
1 拓扑结构及数学模型
所研究的双向变流器采用三相电压型半桥电路结构,主电路拓扑如图1所示。ea、eb、ec为网侧相电压;ua、ub、uc为交流侧电压;ia、ib、ic为网侧相电流;La、Lb、Lc为网侧电感;Ra、Rb、Rc为网侧等效电阻;C为直流侧电容;udc为直流侧电压;idc为直流侧电流;RL为直流侧等效电阻;iL为直流侧等效负载电流,V1~V6为功率开关管。
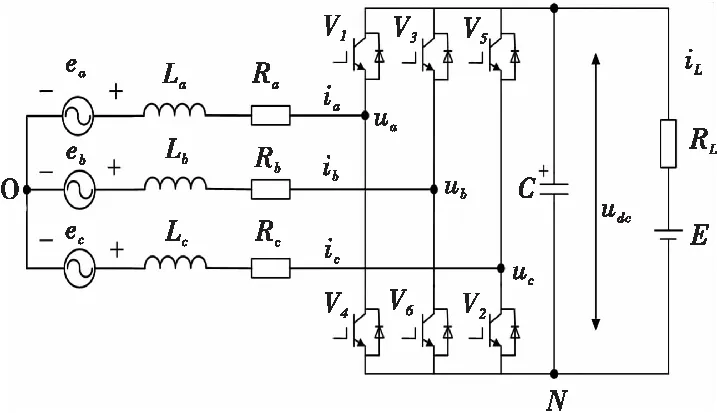
图1 三相电压型双向变流器主电路拓扑图Fig.1 Main circuit topology diagram of three-phase voltage type bidirectional converter
为了简化控制系统设计,针对三相电压型双向变流器,通过Clark变换和基尔霍夫定律,得到在αβ坐标系下的数学模型为
(1)
其中,βα、ββ为开关管的开关函数在两相静止坐标系下的分量;uα、uβ、iα、iβ,则分别为交流侧电压和电流的α、β分量。
2 准比例谐振控制策略
2.1 基于QPR的电流内环控制
QPR控制器是在PR控制器的基础上提出来的,QPR控制器具备PR控制器无静差跟踪交流指令的优点,同时又克服了PR控制器因频率偏移而增益衰减的问题[5-6]。QPR控制器传递函数:
(2)
其中,ω0为基波角频率,Kp为比例增益,Kr为振荡项增益。相对于PI控制器[7-8]传递函数来说,它在关于实轴对称的复平面内引入2个固定频率的开环极点,使其在基波频率处增益很大,因此在该频率下系统可实现零稳态误差跟踪,能够直接控制交流量。

(3)
将式(3)两边同时进行拉氏变换有:
(4)
根据泰勒公式并结合近似处理条件,得:
G(s)=1/(1+Tss)
(5)
由式(4)和式(5),并进行化简可得:
(6)
将式(6)等号两边同时进行拉氏反变换,可得:
(7)
式(7)两边同乘上L,并进一步处理,得到:
(8)
根据(8)式可知,M可以作为调节器用来调节电流误差,为了实现电流无静差控制,采用QPR控制器。由式(1)和式(8),在忽略网侧电感阻值后,可得uα、uβ的控制方程为
(9)
2.2 QPR控制器参数设计
引入QPR控制器后,双向变流器系统电流内环α轴的控制框图如图2所示。

图2 基于QPR控制的电流环控制框图Fig.2 Current loop control block diagram based on QPR control
由图2可得变流器输出的并网电流:
(10)
在谐振频率处GQPR(s)GPWM(s)G0(s)的增益一般远大于1,可知式(10)右侧第一项近似为0,第二项系数近似为1。由于GPWM(s)和G0(s)中参数由系统给定,则可通过给GQPR(s)设置合适的参数使实际的输出电流与指令电流相同。

(11)
由式(11)得电流环闭环传递函数的特征方程为

(12)
由式(12)并结合劳斯稳定判据,可求得Kp和Kr的取值范围。QPR控制器的带宽为ωc/π,因此截止频率ωc直接影响QPR控制器的带宽。对于系统容量较小的电力系统,其频率偏差限值通常可放宽到±0.5 Hz。因此带宽ωc/π=1Hz即ωc/π=3.14 rad/s,为保留一定的裕度,取ωc=10 rad/s。
为进一步明确QPR控制器各个参数对控制性能的影响,通过改变各个控制器参数并画出波特图,如图3所示。

图3 Kp,Kr,ωc取不同值时控制器的波特图Fig.3 Bode diagram of the controller when Kp,Kr,ωc take different values
由图3可以看出,QPR控制器参数Kr决定谐振频率处的幅值增益,增大Kr,谐振频率处的增益随之增大;Kp对控制器的整个频带内的幅值增益和相位裕度都有影响,增大Kp,整个频带内的幅值增益随之增大,但相位裕度减小,Kp过大,系统稳定性下降;可以通过调节ωc改变控制器的带宽,消除Kp过大带来的影响[9-11]。
由上述分析结合本系统实际的需要,选择的QPR控制参数如下:Kp=10,Kr=100,ωc=10 rad/s,选择主电路网侧电阻R=0.1 Ω,网侧电感L=2 mH,采样频率5 kHz,得其根轨迹如图4所示。

图4 基于QPR控制的电流环根轨迹Fig.4 Current loop root trajectory based on QPR control
由图4可知,该系统为4阶系统有4个极点,2个零点,根轨迹主要位于复平面纵坐标的左侧,系统稳定性较好。
2.3 双向变流器PI-QPR控制整体结构
本文设计的双向变流器,采用电压电流双闭环控制方式,其内环电流采用式(9)的控制形式。外环采用恒功率控制,其方程为

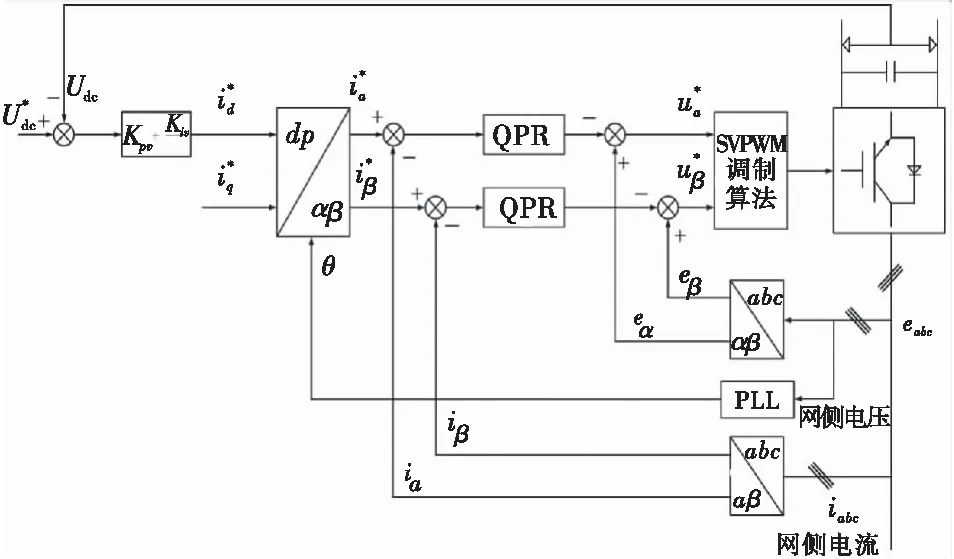
图5 基于PI-QPR控制的双向变流器原理框图Fig.5 Block diagram of bidirectional converter principle based on PI-QPR control
3 仿真及结果分析
为了验证所提PI-QPR控制策略的可行性与优越性,在MATLAB/Simulink中分别搭建了PI-QPR控制和双PI控制的双向变流器系统仿真模型,并将两种控制策略的仿真结果进行比较。
仿真模型的主要参数如下:三相对称交流电源380 V/50 Hz,网侧电感为2 mH,网侧等效电阻为0.1 Ω,开关频率为5 kHz,直流侧电压给定值为600 V,并网指令电流6.3 A,电压外环控制器参数为Kp=0.5,Ki=30;电流内环:PI控制器参数为Kp=10,Ki=100;准PR控制器参数为Kp=10,Kr=100,ωc=10 rad/s。
图6为两种控制策略下的双向变流器a相输出电流和指令电流仿真波形。由图6(a)可以看出,传统PI双闭环控制下的输出电流与指令电流之间存在一定的控制静差,PI控制有限的增益无法完全消除跟踪过程的相位延迟,控制效果一般;而采用PI-QPR控制时,双向变流器输出电流与基准电流的波形基本吻合,可以实现无静差跟踪,控制效果较好。
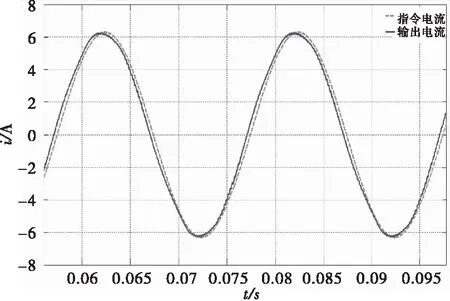
(a) PI双闭环控制下仿真波形
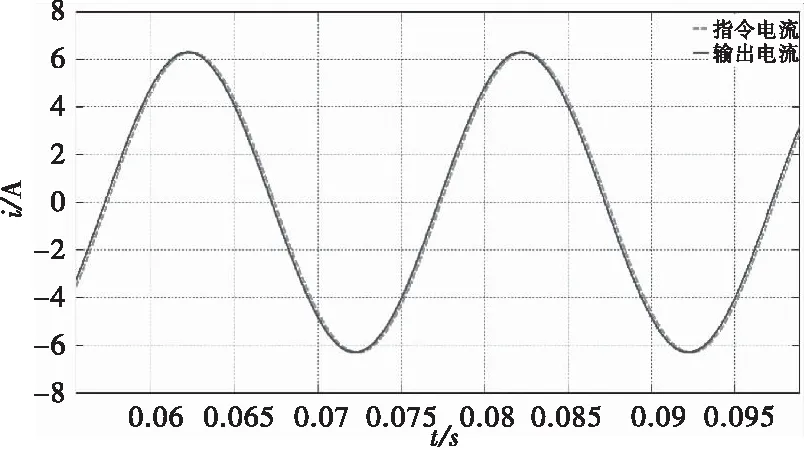
(b) PI-QPR双闭环控制下仿真波形
根据图7双向变流器输出电流的FFT分析可知,双PI控制下的输出电流THD为3.92%,PI-QPR控制下输出电流THD减小到了1.05%,谐波明显降低。

(a) 双PI控制下输出电流的FFT分析
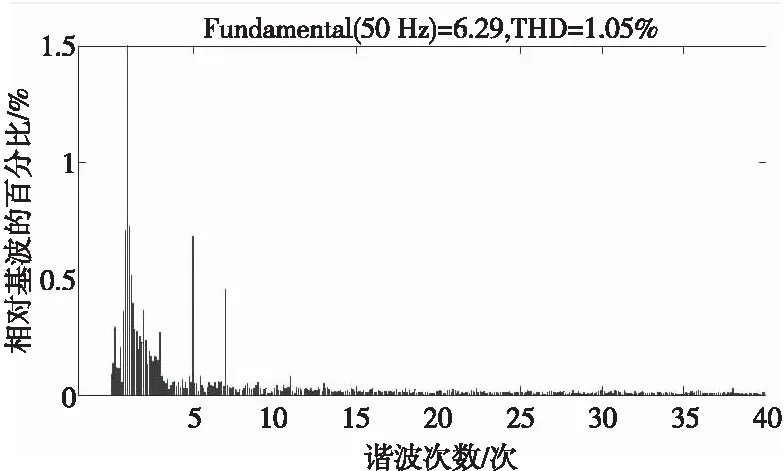
(b) PI-QPR控制下输出电流的FFT分析
4 结束语
针对三相电压型双向变流器提出了一种新型的PI-QPR控制策略,设计出PI-QPR控制下的双向变流器控制结构,将准比例谐振控制引入电流内环,实现在两相静止坐标系下的电流无静差控制,提升系统的整体控制精度,电压外环采用PI控制,提高系统的动态响应速度及抗干扰性,通过MATLAB/Simulink仿真对比,结果表明,PI-QPR控制可以克服传统PI控制在跟踪过程中存在的稳态误差问题,降低电流谐波含量,使系统具备更好的动态响应速度和抗干扰能力,为微电网双向变流器的可靠运行提供了一种可行方案。
猜你喜欢
出版人(2022年11期)2022-11-15
今日农业(2021年19期)2021-11-27
数学小灵通(1-2年级)(2021年10期)2021-11-05
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
电子制作(2019年10期)2019-06-17
电子制作(2018年19期)2018-11-14
通信电源技术(2018年5期)2018-08-23
电子制作(2016年1期)2016-11-07
通信电源技术(2016年4期)2016-04-04
