
一种新型馈电形式的四臂螺旋天线
2019-11-25 05:34:52商锋,尚玮
西安邮电大学学报 2019年4期
商 锋, 尚 玮
(西安邮电大学 电子工程学院, 陕西 西安 710121)
在卫星通信、武器制导等领域中,由于通信对象之间相对高速运动,为了保证通信的顺畅,卫星天线应具有圆极化、低仰角、高增益等特点,四臂螺旋天线正是由于具有这些优点而得到了广泛的应用[1-3]。
四臂螺旋天线常用的馈电形式是利用一个独立于天线的馈电网络进行馈电和阻抗匹配。馈电网络印刷在一个具有特定介电常数的电路板上,和天线组合在一起。馈电网络的大小取决于工作频率[4],当工作频率较低时,馈电网络的尺寸会增加,导致馈电网络的尺寸比天线本身大[5]。庞大的体积,限制了四臂螺旋天线的应用。
四臂螺旋天线的小型化是一个重要的研究方向,通常采用螺旋臂折弯[6-7]、加载寄生枝节[8]、改变介质形状[9]、采用高介电常数[10]、改变馈电形式[11]、采用结构紧凑的馈电网络[12]等方法来减小天线尺寸。但是,四臂螺旋天线的馈电方式大多仍采用Wilkinson功率分配器结构,馈电网络的尺寸较大,致使四臂螺旋天线的馈电网络很难小型化。
为了减小四臂螺旋天线的尺寸,本文拟提出一种新型馈电形式的四臂螺旋天线。不依靠底部较大的馈电网络实现馈电,而是采用单同轴电缆经天线轴心在顶部实现平衡馈电,以期减小天线的尺寸。
1 四臂螺旋天线设计结构
常见的四臂螺旋天线包含四臂螺旋天线和底部馈电网络两部分,其结构如图1所示。
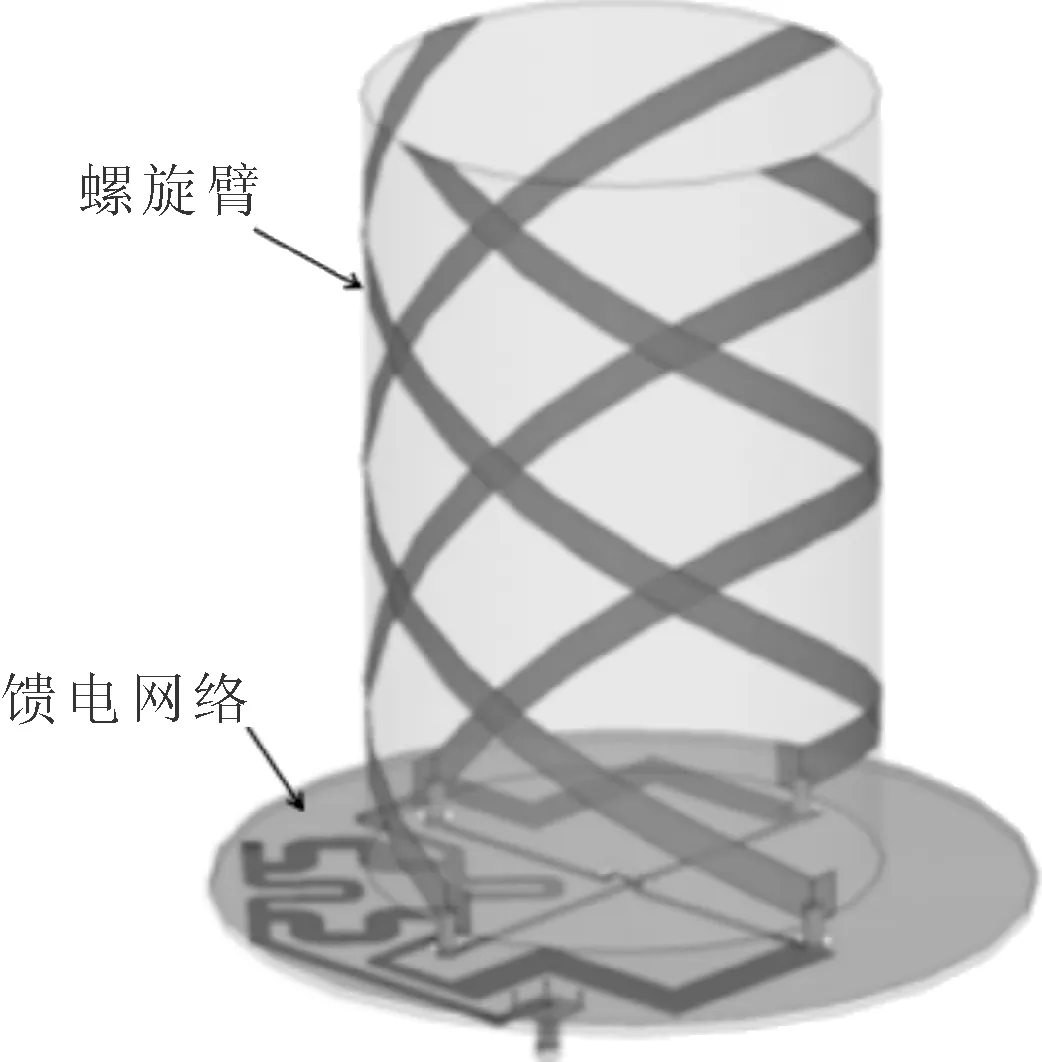
图1 四臂螺旋天线结构
上部的四臂螺旋天线由4根螺旋臂组成,采用顶部开路的结构。每根螺旋臂的臂长为四分之一波长的整数倍,螺旋臂的馈电电流大小相等,相位分别为0°、90°、180°、270°,依次相差90°,以实现天线的圆极化性能。
下部为馈电网络部分。为了实现四个臂两两相差90°的相位特性,通常利用一分四的Wilkinson功率分配器结构实现[13]。一分四的功分器馈电网络原理如图2所示。
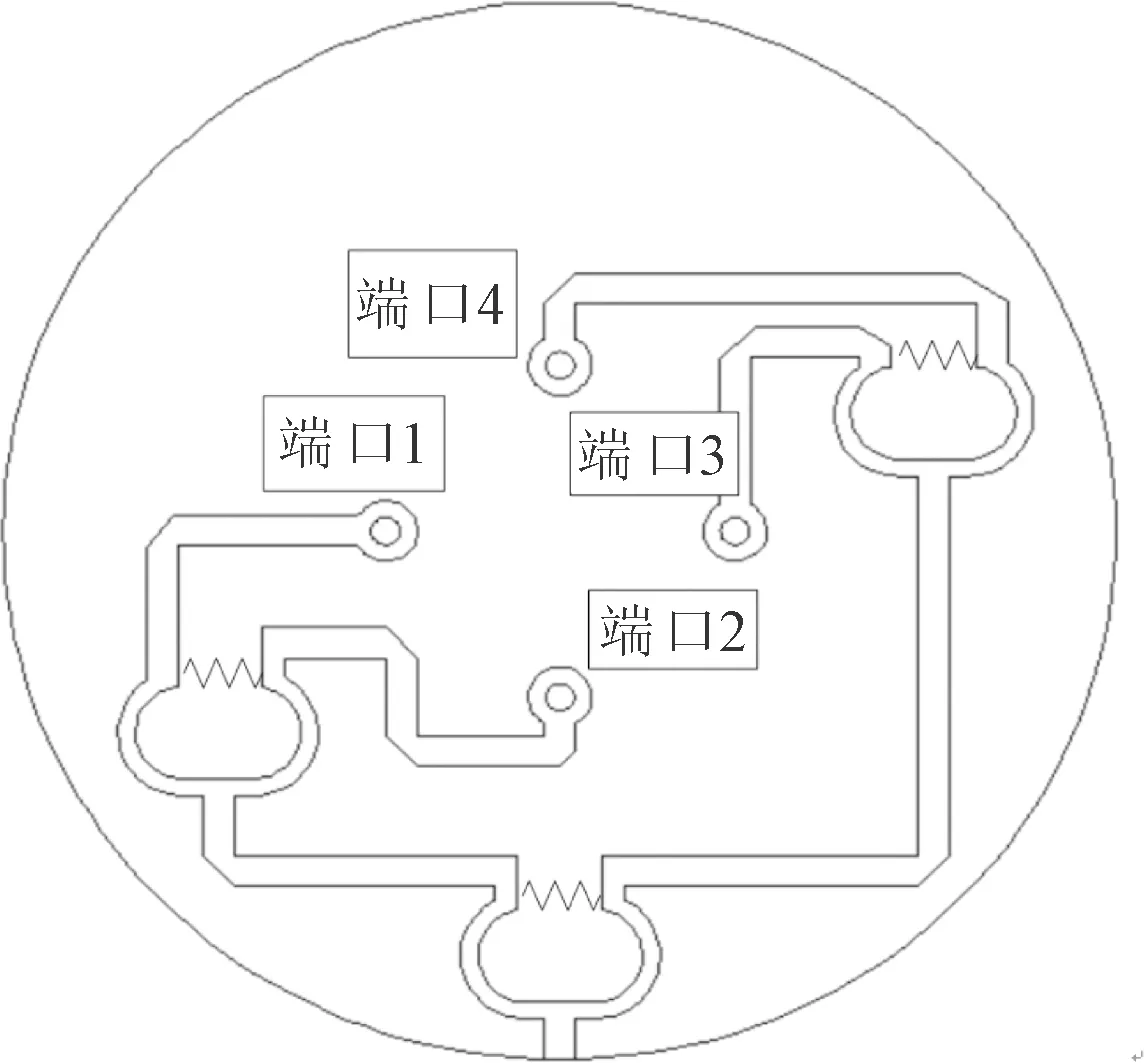
图2 一分四的功分器馈电网络
端口1、端口2、端口3、端口4分别接四臂螺旋天线的四个臂,每个端口两两相差90°,从而实现圆极化特性。
2 四臂螺旋天线结构设计
四臂螺旋天线的设计分为天线设计和馈电网络的设计两个部分。
2.1 螺旋天线的设计
采用印刷的方式制作螺旋天线,将螺旋臂印刷在相对介电常数为5.1的圆柱体上。四臂螺旋天线每根螺旋臂的长度为四分之一波长的整数倍,调节螺旋臂的轴长或者螺旋的圈数可以实现圆极化特性。利用HFSS ANSOFT仿真软件进行仿真和参数优化,得到四臂螺旋天线的仿真模型,如图3所示。天线中间有一根同轴线从圆柱的中心底部穿过,在天线的顶部进行馈电。同轴线的内导体连接天线的两个螺旋臂上,外导体连接两外两个臂。

图3 设计天线的仿真模型
设计的天线结构尺寸参数如图4所示。天线直径D为18.5 mm,高度H为32.3 mm,螺距S为37 mm,螺旋直径A为3.3 mm,螺旋圈数n为0.85。
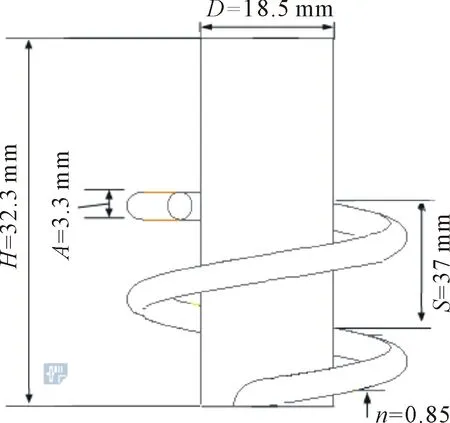
图4 设计天线的结构尺寸
2.2 馈电网络的设计
设计的馈电网络采用单同轴电缆顶部馈电网络形式,以实现90°的相位差和阻抗匹配功能。设计的馈电网络附着在螺旋天线的顶部,其尺寸和螺旋天线顶部的尺寸相同,采用单同轴电缆从底部经轴心到达顶部进行馈电。设计的顶部馈电网络结构如图5所示。
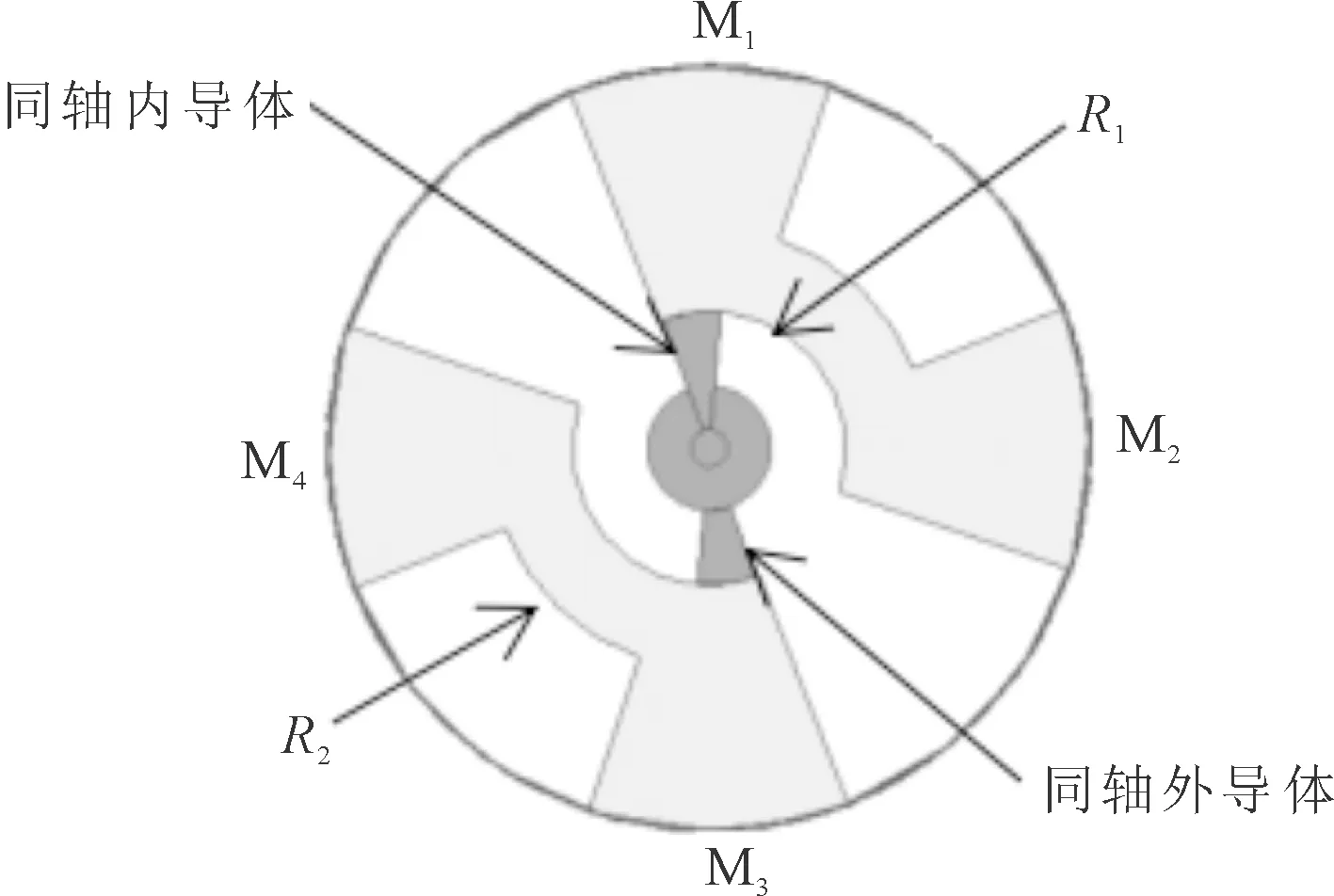
图5 顶部馈电网络结构
图5中,R1、R2分别为图中所指圆弧的内、外半径,作为馈电网络的设置参数。M1、M2、M3和M4为4个金属的辐射贴片,分别接螺旋天线的四个臂。螺旋臂之间的相位两两分别相差90°,即0°、90°、180°和270°。整体馈电网络分为两部分,分别接同轴体的内、外导体。内、外导体的电流方向相反,有180°的相位差,分布在螺旋臂上。M1与M2之间、M3与M4之间通过微带线连接,使得M1与M2之间、M3与M4之间产生相位差,实现了螺旋臂之间90°的相位差关系。可以通过调节连接M1与M2之间、M3与M4之间的微带线长度获得良好的圆极化特性,微带线的长度和宽度的调整通过设置参数R1、R2进行控制。
参照天线的螺距S参数,通过调节顶部馈电网络的电容电感值实现天线的阻抗匹配[13]。顶部馈电网络的匹配网络如图6所示。

图6 顶部馈电网络的匹配网络
利用ADS(advanced design system)软件在顶端馈电网络处加载电感电容进行匹配[16]。把ANSOF HFSS的S参数导入到ADS软件中,进行阻抗匹配。经设计后的匹配网络中分别加入了串联的两个电感和并联的两个电容。电感值为12 nH,电容值分别为1.3 pF和2.6 pF。
3 仿真及结果分析
采用HFSS ANSOFT软件仿真所设计天线的辐射方向图,应用ADS软件仿真所设计天线的阻抗匹配。
3.1 方向图的仿真
利用ANSOFT HFSS软件对天线进行建模仿真及参数优化后得到天线的远场辐射方向图,如图7所示。从图中可以看出,所设计的天线在仰角的余度为30°即仰角60°时,增益为-0.1 dBc;仰角的余度为330°即仰角240°时,增益为-0.2 dBc;仰角的余度为60°即仰角30°时,增益为2.23 dBc;仰角的余度为300°即仰角210°时,增益为2.27 dBc,仰角的余度为0°即正前方增益为3.01 dBc。
所设计螺旋天线的中心频率为1 568 MHz,涵盖了北斗B1频点1 561.098 MHz,带宽2.046MHZ以及GPS L1频点1 575.42 MHz、1 561 MHz和1 575 MHz的频率。
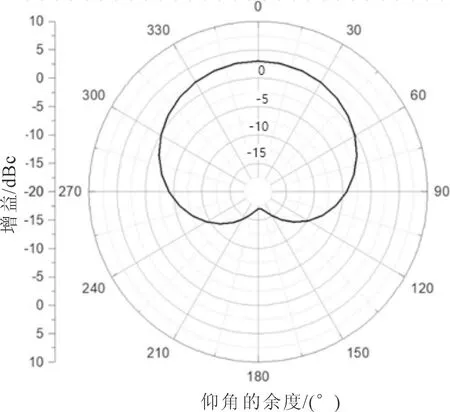
图7 天线的辐射方向图
所设计天线的增益随频率变化情况如图8所示。可以看出,随着频率的增大,天线的增益也逐渐增大。B1频点的边频1 559 MHz的增益为-0.8 dBc,GPS L1的边频1 576 MHz的增益为3.23 dBc。

图8 增益随频率的变化
3.2 轴比的仿真
调节连接M1与M2之间、M3与M4之间的微带线长度获得良好的圆极化特性。通过设置不同参数R1、R2调整微带线的长度和宽度。
不同R1对轴比影响的仿真结果如图9所示。可以看出,R1的不同对轴比宽度有影响,R1值的不同引起M1、M2、M3、M4之间的微带线的变化。当R1为3.3 mm时,轴比宽度最好。
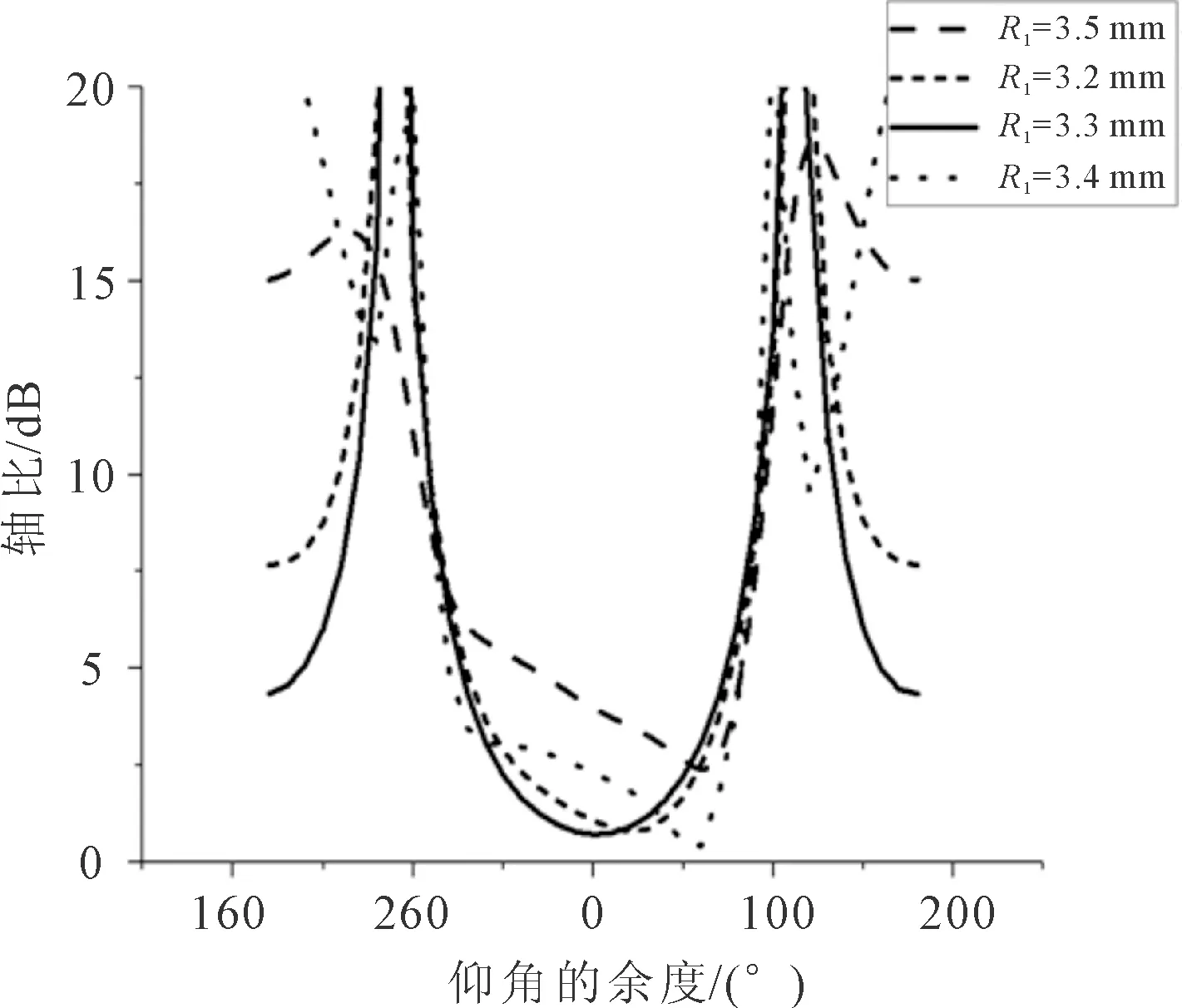
图9 不同R1对轴比的影响
不同的R2对轴比的仿真结果如图10所示。可以看出,当R2为5.9 mm时轴比最宽。
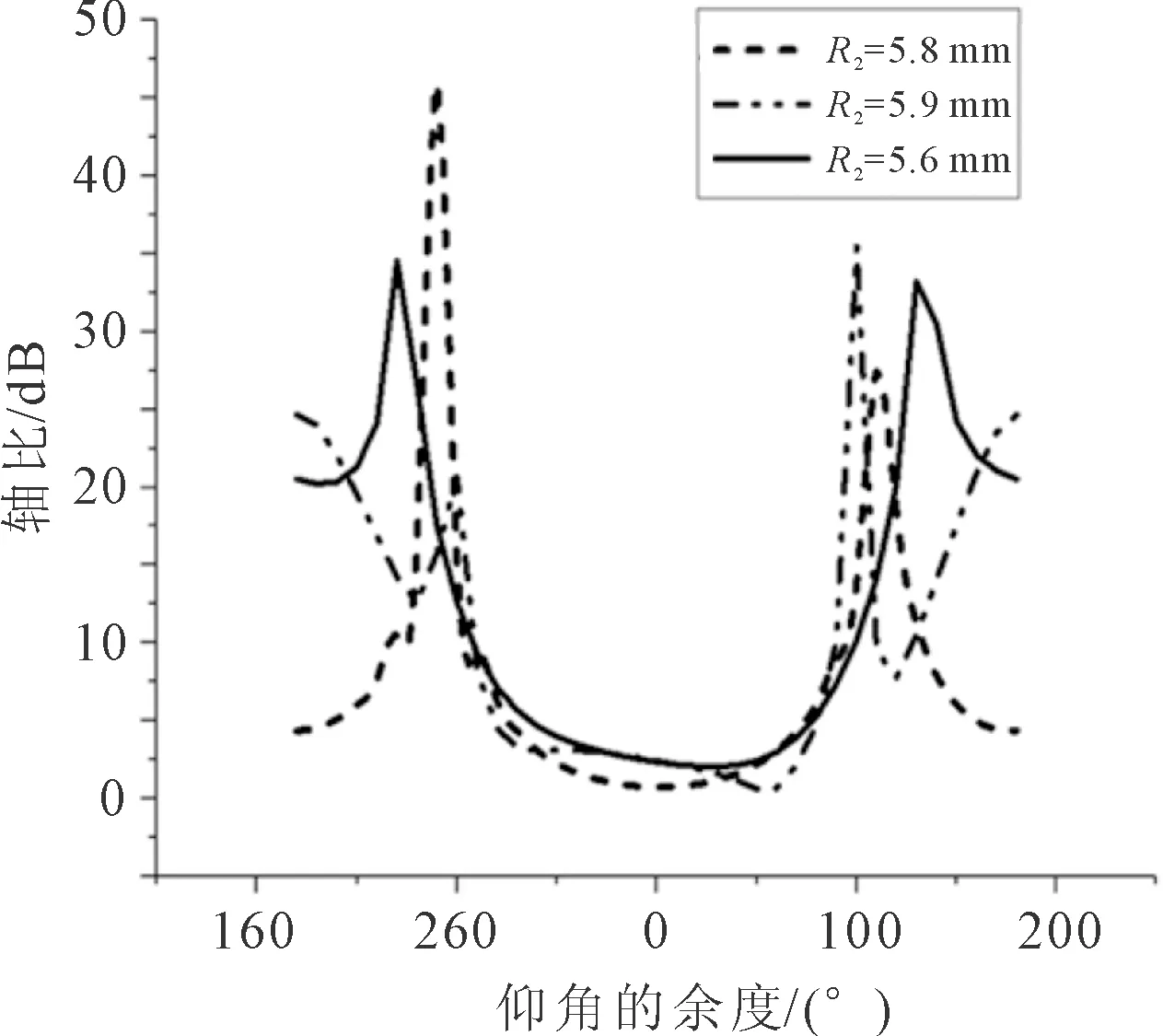
图10 不同R2对轴比的影响
当R1为3.3 mm,R2为5.9 mm时的轴比结果如图11所示。可以看出,轴比在3 dB以下的仰角的余度是从300°到60°,宽度为120°。即此时的轴比满足3 dB以下宽度为120°。
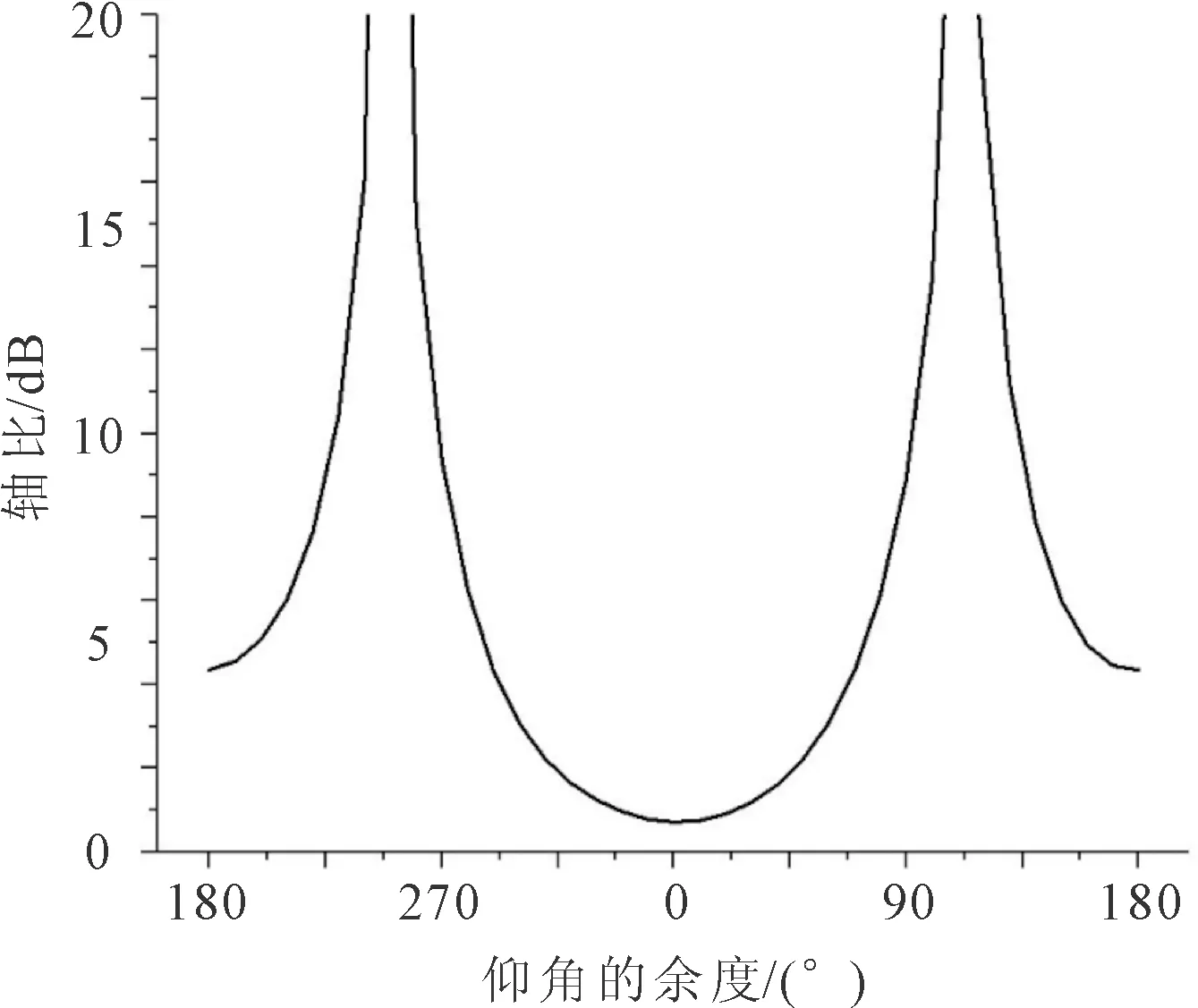
图11 螺旋天线的轴比
所设计天线的轴比随着不同频率变化的仿真结果如图12所示。可以看出,在B1频点1 561.098 MHz、边频1559 MHz的轴比为3.3 dB;在GPS L1频点1 575.42 MHz、边频1576 MHz的轴比为2.13 dB。只在1 559 MHz处的圆极化轴比大于3 dB。
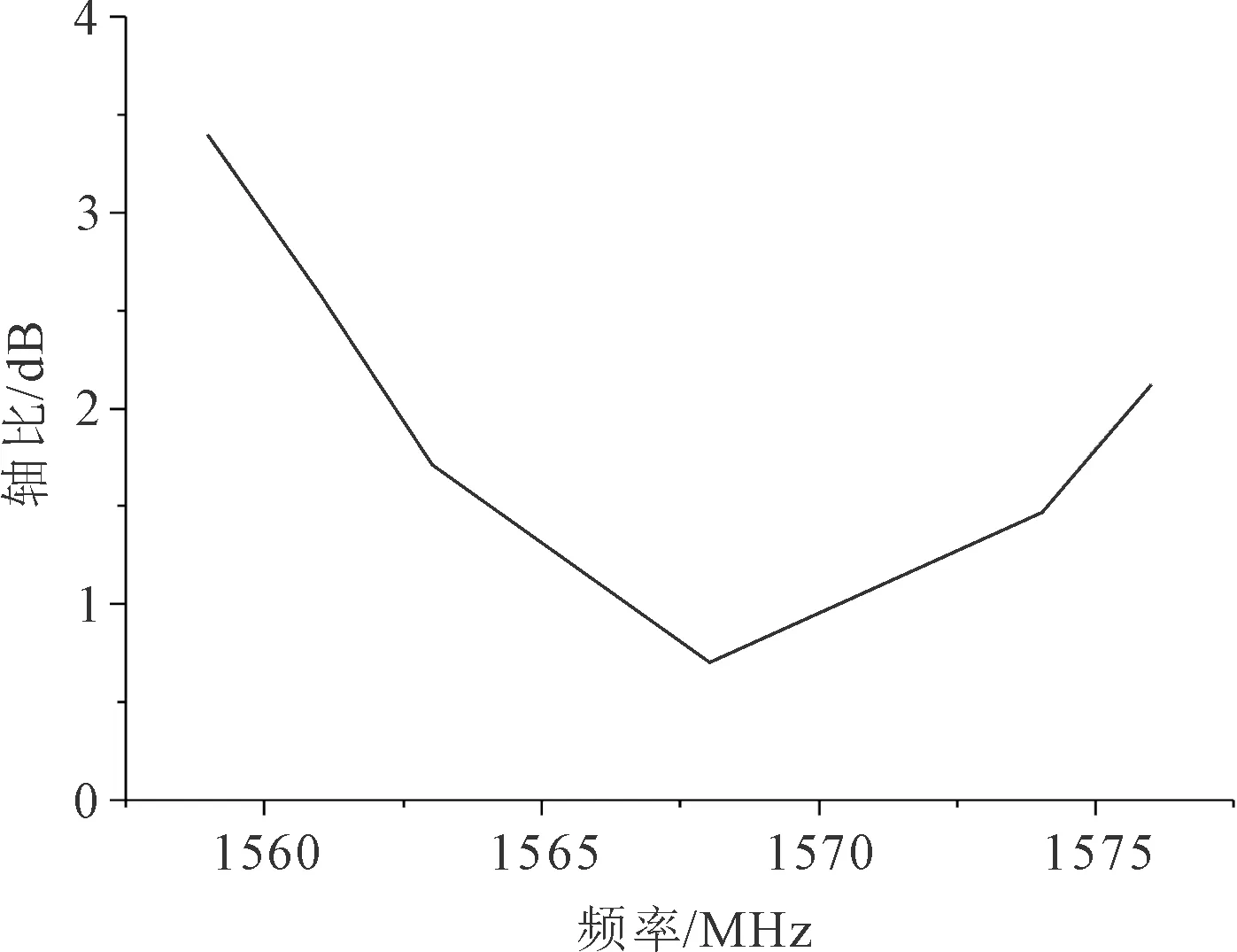
图12 轴比随频率的变化
3.3 阻抗匹配
所设计天线的回波损耗仿真结果如图13所示。可以看出,所设计天线在1.568 GHz处的回波损耗为-19.85 dB,1.576 GHz的回波损耗结果为-17.93 dB,1.559 GHz的回波损耗结果为-13.7 dB。满足带宽内频率的回波损耗小于-10 dB的要求。
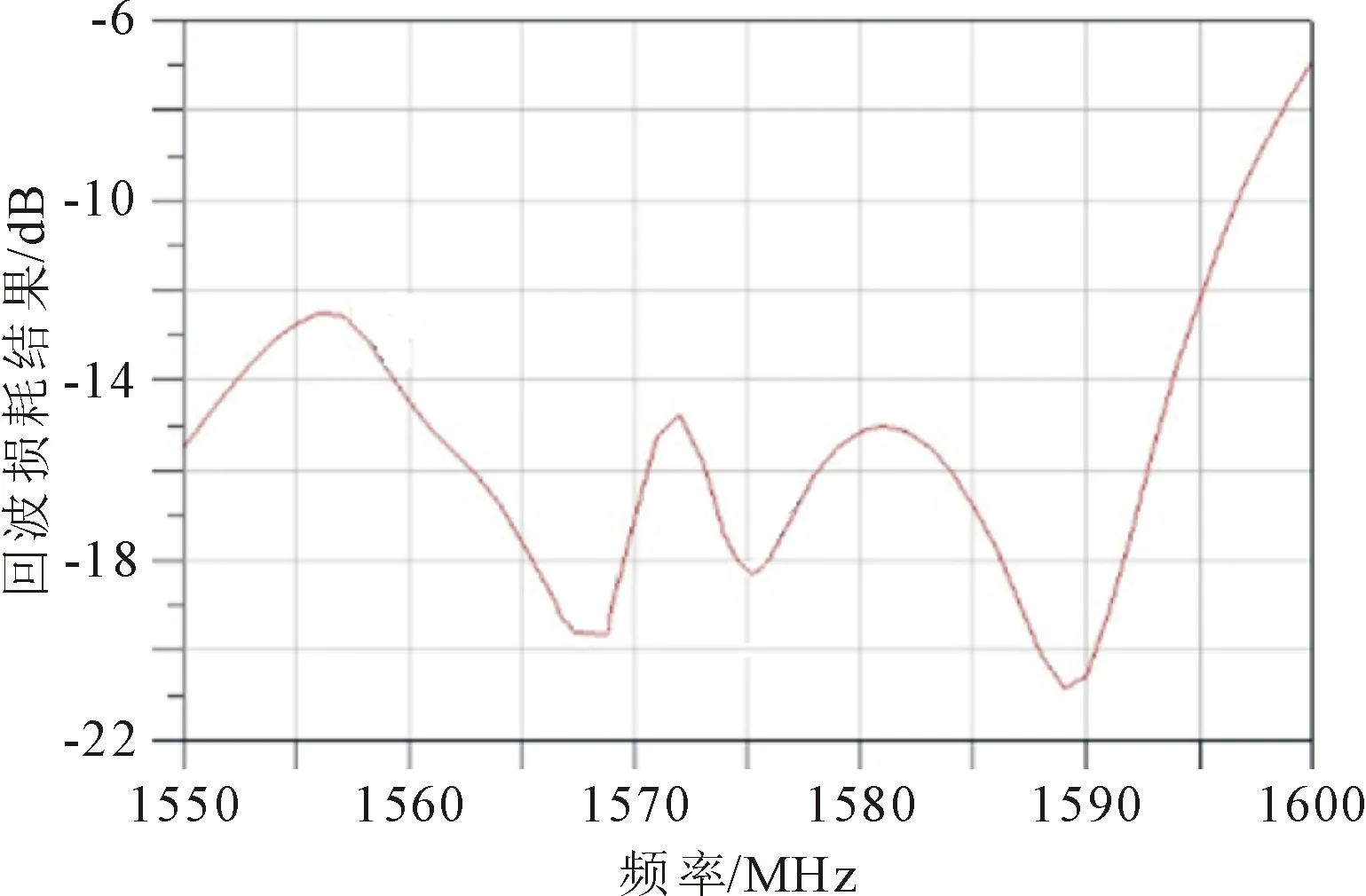
图13 天线的回波损耗
文献[13]的四臂螺旋天线和本文所设计螺旋天线的结构如图14所示。
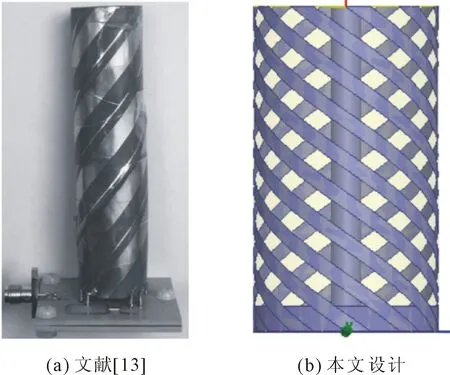
图14 四臂螺旋天线对比
两种螺旋天线相比较,文献[13]四臂螺旋天线馈电依靠底部大型的馈电网络,其尺寸为40 mm×40 mm,高为105.82 mm,轴比宽度为150°,正前方增益为3.2 dBc。
本文设计的四臂螺旋天线不采用底部大型的馈电网络,馈电网络位于四臂天线的顶部,直径大小和四臂天线直径一致。直径为18.5 mm,高为32.3 mm,轴比宽度为120°,正前方增益为3 dBc。虽然设计天线的轴比宽度小于文献[13]天线的轴比宽度,但尺寸小,易于集成。且正前方增益大,方向性强。
4 结语
为了实现四臂螺旋天线的小型化,采用单同轴电缆馈电模式,利用顶部馈电网络进行馈电,在馈电处利用电容、电感进行阻抗匹配。仿真结果表明,设计的天线能够同时涵盖北斗B1频点1以及GPS L1频点。天线的右旋圆极化性能良好,驻波比小于1.5。与采用底部馈电网络实现四臂螺旋天线圆极化性能的方式相比,设计天线的结构更加简单,尺寸较小。所提出的方法为天线的小型化提出了一种思路。
猜你喜欢
测试技术学报(2022年1期)2022-02-17 06:02:16
现代信息科技(2020年23期)2020-07-09 21:26:25
河北省科学院学报(2020年1期)2020-05-25 06:57:20
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
电子测试(2018年1期)2018-04-18 11:51:59
科技视界(2017年5期)2017-06-30 00:15:19
科技视界(2016年15期)2016-06-30 12:48:10
西部广播电视(2015年6期)2016-01-16 03:45:12
山东工业技术(2015年2期)2015-07-26 09:03:09
