双LCL谐振型无线充电系统设计*
2019-11-22 08:29景玉军
汽车实用技术 2019年21期
景玉军
双LCL谐振型无线充电系统设计*
景玉军
(中山职业技术学院,广东 中山 528400)
针对传统无线充电系统在充电阶段因原副边线圈偏离移动,对整个电能传输系统运行效率、稳定性造成较大影响的问题,分析了一种双LCL复合谐振网络无线充电系统的优势,设计了双LCL谐振型无线充电网络结构,并通过仿真验证了其在无线充电中应用的可行性。
无线充电系统;双LCL复合谐振;充电;网络结构
前言
新能源汽车产业成为国家汽车工业的战略方向,不仅可以系统地解决能源安全问题,还可以实现中国汽车产业“弯道超车”,同时还能带动材料、电池、电机、控制系统、充电设备等产业的共同发展,促进中国经济战略转型。《中国制造2025重点领域技术路线图》中提出,到2020年自主新能源汽车年销量突破100万辆,市场份额达到70%以上;到2025年形成自主可控完整的产业链,与国际先进水平同步的新能源汽车年销量300万辆,自主新能源汽车市场份额达到80 %以上。但是当前新能源汽车在充电的方便性、快捷性等方面都较严重的阻碍了纯电动汽车的快速发展。因此,无线充电方式无需直接进行电气连接可实现纯电动汽车移动式在线充电,不仅解决了续航里程短、充电频繁的问题,而且整体电源输送较方便,且稳定性较高。因此,对电动汽车的无线充电系统进行研究非常必要。
1 LCL谐振型无线电能传输补偿网络特性

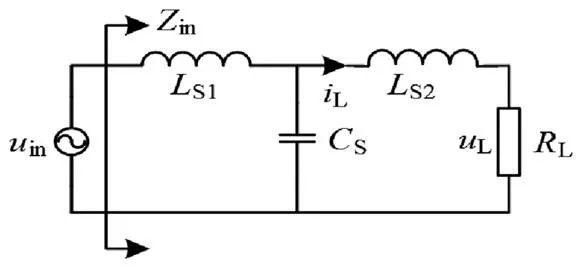
图1 LCL电路拓扑
由于线圈电流仅与对应侧激励电压存在联系,因此,在互感下降,或另一侧为零互感的情况下,线圈电流均可维持标准水平[3],且变换器输出电流可随着互感的变化而变化,保证互感降低工况下正常运行;另外在LCL谐振型电路副边出现短路情况时,一侧变换器输出电流会稳定不变,同时促使另外一侧输出电流归零,呈现突出的鲁棒性,保证系统参数一定时传输功率最大。
2 双LCL谐振型无线充电系统谐振补偿方案设计
当前无线充电传输网络谐振补偿可以利用串联-串联、串联-并联、并联-并联、并联-串联等电路连接方式,在发射端、接收端两侧同时进行伏安容量补偿[4]。其中,串联-串联补偿方式主要是发射端线圈直接与电压源连接,同时接收端线圈直接与电压源连接;并联-并联补偿方式需要电压后端串联电感,将电压源转换为电流源后与发射端线圈连接,此时由于发射端线圈电路输出处于恒定状态,接收端并联补偿输出可假定为电压源;并联-串联补偿方式,接收端串联补偿输出可假定为电流源[5]。在上述传输模式中,串联-串联结构所获得最大传输功率远高于其他结构。因此,为保证双LCL谐振型无线充电传输网络谐振补偿后最大传输功率与串联串联结构最大传输功率相同,综合利用耦合系数增加、直流电压增加、谐振频率更改等方式,促使相同参数下LCL结构最大传输功率有效提升。耦合系数增加主要是在假定双LCL谐振型无线电能输送网络中逆变器开关频率与对应补偿结构中接收端、谐振频率相同的情况下,促使LCL结构谐振拓扑参数与串联-串联结构谐振拓扑阐述一致,以保证LCL结构最大传输功率与串联-串联最大传输功率相同,会导致LCL耦合系数超出标准1,实现难度较大。直流电压增加主要是在假设原副边处于完全对称状态情况下,将原副边电压同时增加一定倍数,以增加原副边电压等级,即器件耐压等级;谐振频率更改主要是在无线电力能源输送阶段,在相关标准限度内适当改动系统工作频率。另外,依据到相关标准限制,还可在控制耦合系数一定的基础上,考虑发射端线圈、输出端线圈完全对称因素,降低线圈电感。
3 双LCL谐振型无线充电系统实现
高效、稳定的无线电力能源传输理论上应完全与马斯曲线贴合,但由于各种因素的影响,即使采用了无线充电补偿方法,也难以获得理想的效果。借鉴三阶段恒流恒压充电优势,设置一种恒流恒压可切换式的无线电能传输方式,即假定初级LCL补偿网络、次级LCL补偿网络两电感数值一致,则在归一化角频率为1时,次级工作状态与初级工作状态相同,且负载电流不会次级工作状态、初级工作状态中电阻造成影响。此时,在双LCL谐振型无线电能传输系统实际运行过程中,可固定磁路结构位置、系统参数,促使无线电力传输动力蓄电池恒流充电阶段负载电流大小恒定。通过对负载电压大小进行检测,可促使电压上升至蓄电池电压,结束恒流电力能源输送过程。在恒流电力能源输送结束之后,可以恒定电压小电流的形式,在初级补偿电容两端并联一个与其容量相同的无感电容,以开关为控制枢纽,调整并联后无感电容切入、切除,提高电池传输饱和程度。
如图2所示,u1、u2分别为网侧经AC/DC变换获得的直流母线电压、副边全控桥输出直流母线电压;i1、i2分别为网侧经AC/DC变换获得的直流母线电流、副边全控桥输出直流母线电流;C1、C1'为并联的无感电阻;L1、L2、L1'、L2'是LCL网络中的电感;R1、R2、R1'、R2'为负载电阻;i、i1、i2、i1'、i2'为LCL网络负载电流。

图2 双LCL谐振型无线电能传输图
4 双LCL谐振型无线充电系统仿真验证分析
4.1 双LCL谐振型无线充电系统仿真验证方案设计
为验证双LCL谐振型无线充电系统运行特性,以Ansoft软件为载体,采用频率较高的圆盘型设计方式,结合电磁安全运行标准,对双LCL谐振型车载接收端进行了优化设计,即选择一个φ580mm的圆盘方案,从Ansoft软件内提取三维模型,同时选择九个不同类型的磁心,所选择磁心采用三层叠加的方式,第一层φ为179.0mm,第二层φ为24.0mm,第三层φ为4.0mm。利用两路11匝φ为3.8mm的高频线进行并联设置。验证实验所采用的高频线为AWG38线路。另外,为促使双LCL谐振型无线电能输送网络运行参数与现有元件技术相适应,可限制发射端线圈电流、开关频率及接收端品质因素分别在38A、28kHz、5.8。同时设定发射端线圈、接收端线圈在纵方向上的距离20.0cm。
4.2 双LCL谐振型无线充电系统仿真结果
表1 线圈位置移动时耦合率及输出功率仿真值(局部)

在双LCL谐振型无线充电系统发射端激励频率为28khz,且激励电流有效值为338A时,最大磁心通过密度为114.0mT<磁心理论最高磁通密度(300.0mT),不会发生磁饱和,可以保证双LCL谐振型无线电能输送网络稳定运行。同时考虑到发射端线圈、接收端线圈在横方向、纵方向位置移动会导致双LCL谐振型无线电能输送网络互感变化。据此,结合实际测量结果,从接收端线圈自感、实测发射端线圈自感、耦合率、两线圈输出功率等方面,对比上述Ansoft有限元仿真数据,可得出两者误差<5.0%,且随着横方向发射端线圈、接收端线圈位置偏离移动程度的增大,双LCL谐振型无线电能输送网络输出功率值在稳步上升,耦合率在稳步下降。同理,在纵方向发射端线圈、接收端线圈位置偏离移动程度增加时,线圈输出功率会上升较小的幅度,且耦合率会稳步下降。在横方向发射端线圈、接收端线圈位置偏离移动程度达到125.0mm,纵方向发射端线圈、接收端线圈位置偏离移动程度达到255.0mm时,输出功率会上升14.9W,耦合率会降低0.125%。
5 结语
综上所述,无线充电系统存在的安全风险问题可应用双LCL谐振型结构调节逆变器输出频率、初级谐振电容切入、切除模式,以实现负载恒定电流、恒定电压输出,即发射端移动式在线电能传输。由于双LCL谐振型结构的无线充电系统没有物理层面直接接触,可以从根本上降低充电阶段出现的接触式火花风险;同时,对于双LCL谐振型结构传输功率偏小的问题,可以结合串联-串联结构运行特点,对谐振参数进行优化调整,以获得更高的最大传输功率,保证双LCL谐振型无线充电系统稳定、高效、安全运行。
[1] 危水根,王斌,刘斌,等. LCL型APF控制新方法[J].山东工业技术, 2017(10):210-210.
[2] 陈凯楠,赵争鸣,刘方,等.双向无线充电系统谐振拓扑分析[J].电力系统自动化, 2017, 41(2):66-72.
[3] 景玉军,张冰战.双LCL谐振型无线充电系统研究[J].电力电子技术, 2017(7):89-92.
[4] 焦来磊,荆蕾.无线充电系统设计方法研究[J].电子产品世界, 2017, 24(7):51-54.
[5] 张献,王朝晖,魏斌,等.无线充电系统中电屏蔽对空间磁场的影响分析[J].电工技术学报, 2019, 34(8):100-100.
Design of a Double LCL Resonant Wireless Charging System*
Jing Yujun
(Zhongshan Polytechnic, Guangdong Zhongshan 528400)
Aiming at the problem that the traditional wireless charging system has a great influence on the efficiency and stability of the whole power transmission system because of the deviation and movement of the original secondary coil in the charging stage, this paper analyses the advantages of a dual LCL composite resonant network wireless charging system, designs a dual LCL resonant wireless charging network structure, and passes the simulation test. The feasibility of its application in wireless charging is proved.
Wireless power transfer system;Double LCL composite resonant;Charging;Network structure
A
1671-7988(2019)21-09-03
景玉军(1979-),男,四川三台人,硕士,讲师,就职于中山职业技术学院,研究方向为汽车电子控制、智能交通控制。
TM910.6
A
1671-7988(2019)21-09-03
中山职业技术学院校级科研项目(2017KQ15);中山职业技术学院校级教研教改项目(YJB1718)。
10.16638/j.cnki.1671-7988.2019.21.003
CLC NO.: TM910.6
猜你喜欢
电工技术学报(2022年20期)2022-10-29
北京航空航天大学学报(2022年7期)2022-08-06
北京航空航天大学学报(2022年6期)2022-07-02
上海航天(2022年2期)2022-04-28
汽车实用技术(2022年5期)2022-04-02
科技与创新(2019年11期)2019-09-05
卷宗(2017年1期)2017-03-17
中学物理·高中(2016年4期)2016-05-11
电子产品世界(2016年2期)2016-03-29