基于STC89C52单片机的矿山升降机控制系统的设计与实现
2019-11-21 10:26郭俊俊肖楚杰张可儿
世界有色金属 2019年17期
郭俊俊,肖楚杰,张可儿
(1.陇东学院 信息工程学院,甘肃 庆阳 745000;2.陇东学院 电气工程学院,甘肃 庆阳 745000)
随着我国经济的发展,矿山工程的规模在不断扩大,矿山升降机在矿井进出工作中占有举足轻重的位置,对于规模较大的矿山工程,升降机与运输机是保证矿山安全生产的主要运行工具。升降机是机电一体化设备,其控制系统决定了升降机的运行效率[1,2]。目前我国大部分矿山的升降设备采用继电器、可编程逻辑控制器和单片机控制方式。继电器控制方式触点多、连线复杂、速度慢、精度低、灵活性差、可靠性低;可编程逻辑控制器控制方式连线少、速度快、可扩展性好、可靠性高,但成本高;单片机控制方式具有可编程逻辑控制器的优点,同时成本低、效益高[3]。随着物联网和人工智能的发展,单片机控制方式在升降设备的智能化方面具有很大的优势。
本设计以STC89C52单片机为控制器实现了矿山升降机控制系统设计,该系统响应速度快、处理能力强,提高了升降机的使用性能。
1 概述
设计的矿山升降机控制系统由单片机最小系统、按键电路、运动控制电路、显示电路、报警电路和电源电路等模块构成。系统结构图如图1所示,单片机最小系统为控制核心,按键电路产生呼叫信号作为单片机的输入,单片机输出信号到运动控制电路、显示电路和报警电路,控制升降机的运行速度并显示运行状态。
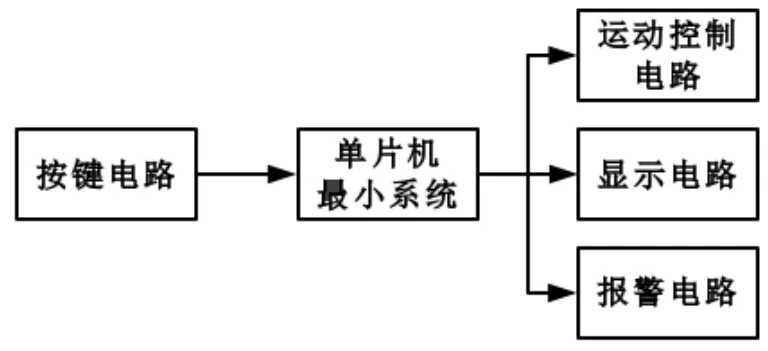
图1 矿山升降设备控制系统结构图
2 硬件设计
2.1 单片机最小系统
单片机最小系统包括STC89C52单片机、时钟电路、复位电路和单片机电源电路。STC89C52具有8位处理器、8KFlash用于存储程序,4KEEPROM用于存储升降机当前停留位置信息,32个双向IO口用于连接输入输出信号。
2.2 运动控制电路
矿山升降机的上下运动以及设备的开关都采用步进电机来实现,它能把电脉冲信号转化为旋转角度位移,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,所以通过控制电脉冲的频率和数量就可以精确控制升降设备电机的转速和角度位移。步进电机结构如图2所示,采用1相励磁法,即按A、B、C、D顺序轮流导通四个线圈可驱动步进电机正转,按D、C、B、A顺序轮流导通四个线圈可驱动步进电机反转。由于单片机IO输出的脉冲信号电流较小,需要加步进电机驱动电路。

图2 步进电机结构图
2.3 显示电路
显示电路主要用于显示升降机当前所在位置、按键状态等信息。当前设备所在位置采用LED数码管显示。每个按键的状态都用LED灯显示,当按键按下时,LED灯亮,等相关功能操作结束后,按键灯将自动熄灭。
2.4 报警电路
报警电路通过蜂鸣器产生特定的提示音表示矿山升降机的运行状态,比如设备到达呼叫位置即将开门或关门以及发生异常等。
3 软件设计
主程序流程图如图3所示,系统上电后,首先进行初始化,获取并显示矿山升降机当前所在位置信息,然后等待按键电路输入信号,当有按键按下时,点亮相应按键灯,控制升降设备向呼叫位置运动,运动过程中LED数码管实时显示当前所在位置信息,当到达呼叫位置时,熄灭相应按键灯,将所在位置信息写入EEPROM,产生提示音,设备门打开并保持30秒,再产生提示音,门关闭,最后返回到等待按键电路输入信号的状态。
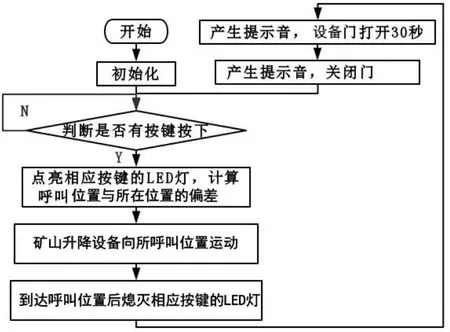
图3 系统流程图
4 系统测试
根据监测节点所上传的数据类型,在矿井处布设系统测试节点,将设计的升降机控制系统应用于井下各个位置并进行测试,升降设备上下行、开关门、所停位置选择和声音提示等功能都可以正常运行,上下行运动时间均小于5秒。
5 结论
基于STC89C52单片机的矿山升降机控制系统具有结构简单、经济实惠、反应速度快的优点。设计实现了升降机上下行、开关门和声音报警等基本功能,具有一定的使用价值。
猜你喜欢
电子制作(2021年3期)2021-06-16
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
中国特种设备安全(2019年4期)2019-05-20
好孩子画报(2019年10期)2019-01-10
中国特种设备安全(2018年10期)2018-12-18
数码世界(2018年7期)2018-08-11
电子制作(2016年1期)2016-11-07