基于Hu 矩的无人直升机着舰标志识别方法*
2019-11-19 09:05:28闫鹏浩石章松吴鹏飞
火力与指挥控制 2019年10期
闫鹏浩,石章松,吴鹏飞
(海军工程大学,武汉 430000)
0 引言
无人机具有重量小,机动性强,环境感知能力好,能够减轻人员损耗等优点,具有广泛应用。在军事方面,无人机具有多种用途,能够实现目标定位、战斗等目的,无人直升机整体架构复杂性较低,价格较低廉,能垂直起降,无需建设专门的起降跑道,并且振颤比较微弱,噪声达到相对较小的水平,可靠性比较高,相对固定翼无人机更具有布置在舰艇上的优势,实现舰载无人直升机的布置是未来的重要发展方向,其必然显著优化其执行任务的能力,而实现该目标的关键技术就是通过传感器实时对着舰标志进行识别与定位。在无人直升机平台上,摄像装置在大多数情况下都装配于直升机上。因为飞行器不断运动,所以摄像装置的高度和拍摄的角度一直在发生改变,因此,通过这种拍摄方式获得的照片,在某个地标中体现的形态不相一致。这些变化造成识别难度大大增加。除此之外,野外的飞行环境通常会让识别系统遭受一定的负面干扰,如此就进一步提升了地标识别难度。
在标志识别领域,现有的识别方法主要分为3类。第1 类是文献[1-2]提出的通过颜色特征对着舰标志进行分割后选取几何不变矩对着舰标志识别;在特征矩的选取上,还可利用仿射不变矩进行识别[3-4]。第2 类方法主要是利用了角点提取与匹配的方式完成对着舰标志的识别[6-7]。第3 类方法是通过滤波器的设计,在对着舰标志进行边缘检测时滤除环境因素的影响[5]。本文对现有的识别方法进行了实验验证,结果表明通过颜色特征对着舰标志进行分割只能在简单无干扰环境下进行,难以适应复杂的背景环境;采用角点提取与匹配的方法仅能实现对单一着舰标志的识别,图像背景变复杂时会对其检测识别效果产生强烈的干扰而使算法失效;而采用滤波器的方法虽然对复杂环境背景的适应性较好并能完成对着舰标志背景的滤除,但其识别效果严重依赖于阈值的选取,鲁棒性较差。
1 基于Hu 不变矩的着舰标志分块匹配识别
1.1 着舰标志几何不变矩的计算
Hu 不变矩运算主要用于灰度图像特征的获取,假定存在连续图像二维函数f(x,y),其(p+q)阶矩界定为:

其中:p 指代的是x 方向对应的阶数,q 指代的是y方向对应的阶数。集合{mpq}由f(x,y)进行明确,对其完成位置归一化,从而获取中心矩μpq,对其定义为:

中心矩μpq指代的是图像平移的不变量,(x0,y0)指代的是图像所对应的重心坐标,其公式为:

其中:m10、m01是图像的1 阶几何矩;m00指代的是图像对应的0 阶几何矩。再对中心矩展开大小归一化,从而获取的中心矩如下:
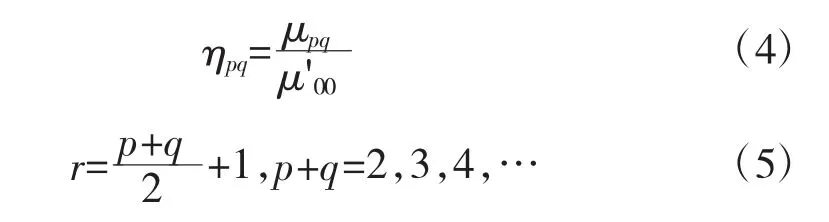
归一化中心矩ηpq指的是平移与缩放的不变量。通过代数不变矩理论,可获取所需的不变矩,包括图像平移、旋转等,这就是著名的不变矩公式:
不变矩的作用是对图像的性质进行描述,在图像处理的过程中,不变矩由于不会受到目标几何变化的影响,因此,其应用范围较广。
1.2 着舰标志分块匹配识别算法流程
Step1:图像预处理,对图像展开一系列的操作,其中比较主要的包括灰度化、二值化、边缘提取、开运算、中值滤波等,从而获取更为理想的特征信息;
Step2:视觉图像分块,将视觉传感器收集的信息按照一定的步长进行分块,从而使整体的图像能够以合理的大小进行匹配;
Step3:根据Hu 矩的计算公式对分块的图像进行Hu 矩计算;
Step4:逐块处理,计算分块图像与着舰标志模板Hu 矩的差值,不断迭代以当前最小差值的图像分块作为匹配的最优位置;
Step5:Hu 矩最小距离模块即为目标所在位置,用方框将目标所在模块框出,完成着舰标志定位。
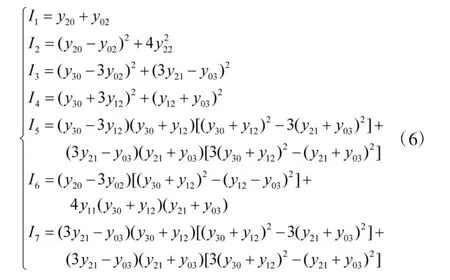
视觉信息处理的具体流程如下页图1 所示。
2 实验与分析
2.1 视觉信息预处理
为了提高图像质量、压缩图像大小,便于之后有更快的处理速度,需要对图像进行预处理操作,我们选取以下几种方法依次对图像进行处理。
1)灰度化
它是指将彩色图像转变为灰度图像,且图像的色度、亮度等特性仍然保持。对于一个像素点来说,它总共包含1 600 多万的颜色变化区间,与此同时,灰度图像是这几个分量完全一致的彩色图像,所有像素点的变化区间一般涵盖255 种,因此,在对其处理的过程中,把测试图像进行灰度化处理,从而图像的整体计算量大幅度降低。
图1 视觉目标匹配流程
2)二值化
图像二值化就是指把像素点所对应的灰度值进行标准化的设置,使其为0 或255,如此就能够将图像转变为黑白效果,将图像涵盖的数据量进一步降低,进而表征目标的整体轮廓。把灰度图像利用特定的阈值进行选取,从而得到体现目标特征的二值化图像。
3)边缘提取
边缘提取具体而言是指在对数字图像展开分析和处理的过程中,对其具有的轮廓展开特定的处理。通常将其视为存留灰度变化非常突出的区域,针对此类图像而言,其一般选择差分运算的方式。边缘信息包含像素的坐标和边缘的方向两个方面。边缘检测的核心理念是应用边缘增强算子,从而着重体现图像所涵盖的局部边缘,在这之后界定“边缘强度”,通过对阈值的设定可获取边缘点集。因为涵盖一定的噪声,获取的边界在某些情况下会在某些位置出现间断。所以,通常会消除填补边界间断点,并将这些边缘连接成完整的线。
4)开运算
数学形态学客观上通过形态学的代数运算子构成,腐蚀能够去除相对较小的噪声区域,膨胀能够很大程度上对空洞部分进行填补。对某个图像先展开腐蚀运算,然后进行膨胀,这个过程命名为开运算。一般而言,在包含噪声的图像通过阈值展开二值化处理之后,其获取的边界平滑性较低,通过开运算可以提高边界的平滑性。
5)中值滤波
滤波去噪是一类图像预处理中比较实用的技术手段,而其中比较具有代表性的是中值滤波方法,对噪声点能够体现非常理想的处理效果。这种方法的核心原理是将数字图像中的值通过邻域所涵盖的中值进行替换,从而将附近的像素值靠近真实值,以此有效地减少一部分孤立的噪声点,另外,它能够把像素按照像素值根据一定的规则进行排序,从而获得单调变化的二维数据序列。
针对提出的基于计算机视觉的无人直升机着舰标志识别技术,由于目前难以得到舰艇环境的视觉图像,在不同背景条件下对着舰标志进行拍摄来模拟不同环境以验证算法的效果,图片样式如图2 所示。

图2 拥有不同背景与变换的着舰标志
先对其展开标准化的预处理,利用采集到的图片作为分析的实例,利用matlab 依次进行灰度化、二值化、边缘提取、剔除和边缘相连像素、开运算、填充运算、中值滤波、噪声滤除等相关操作进行预处理,每一步操作后的图片输出得到如下页图3 所示的预处理结果。
经过逐步输出可以看出,由于着舰标志本身存在比较强烈的黑白对比,经过灰度化和二值化可以将不同光照条件下颜色有所不同的着舰标志转换为对比分明的黑白标志,经过边缘提取、边缘平滑、开运算等步骤之后,能够将大多数环境因素滤除掉,经过填充运算可以将标志中间圆环和四周的方块边框进行填充,此时着舰标志中间的H 已经被掩盖但着舰标志仍旧能够明显地表现出来,最后经过中值滤波等操作再次将杂波滤除,完成预处理。经过对不同背景照片的仿真,可以发现通过以上步骤能够得到比较显著的着舰标志,为下一步几何不变矩的分块对比打下良好的基础。
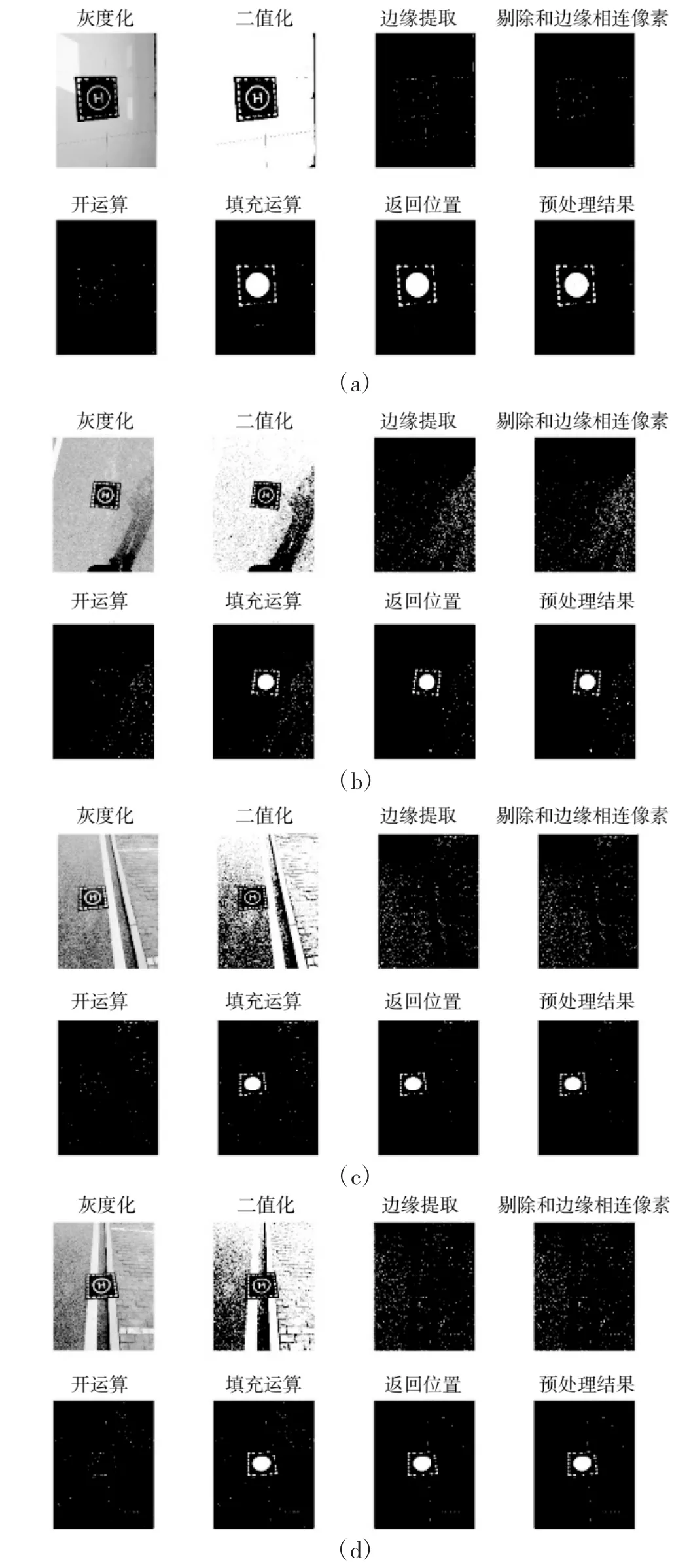
图3 测试图片预处理逐步结果输出
2.2 对比实验
完成预处理后,即对着舰标志进行匹配,选取合适的步长,对测试图像进行分块对比,每个模块与着舰标志模板的七阶Hu 矩计算距离并比较得出距离最小的模块,以此模块作为最终匹配得到的模块,并最终将匹配的模块以蓝色方框圈出,可得如图4 所示仿真输出。

图4 基于Hu 矩分块匹配的着舰标志识别效果
与此同时,采用文献[1-2]中所提出的先通过颜色特征对图片进行分割而后进行基于Hu 不变矩的匹配,采用文献[6-7]所提出的基于角点匹配的方法,仿真结果如图5 所示。
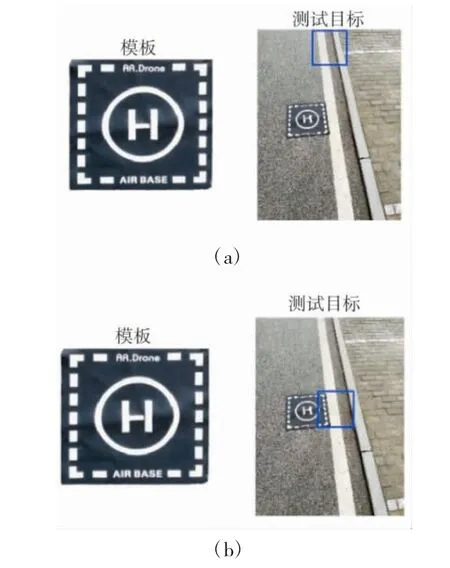
图5 基于参考文献[1-2]与文献[6-7]所提算法的识别
图5(a)为基于颜色特征对图片进行分割而后采用Hu 不变矩对图片进行识别,图5(b)为基于角点提取与匹配的识别。
分别对不同背景下的着舰标志进行识别,得到的结果如图6 所示:

图6 3 种方法识别效果对比
2.3 结果分析
针对使用不同方法进行的仿真,通过计算匹配框与标志中心的距离作为识别准确率的判别标准进行效果对比,对具有不同背景特征的10 幅图片进行了仿真实验,数据如表1 所示。
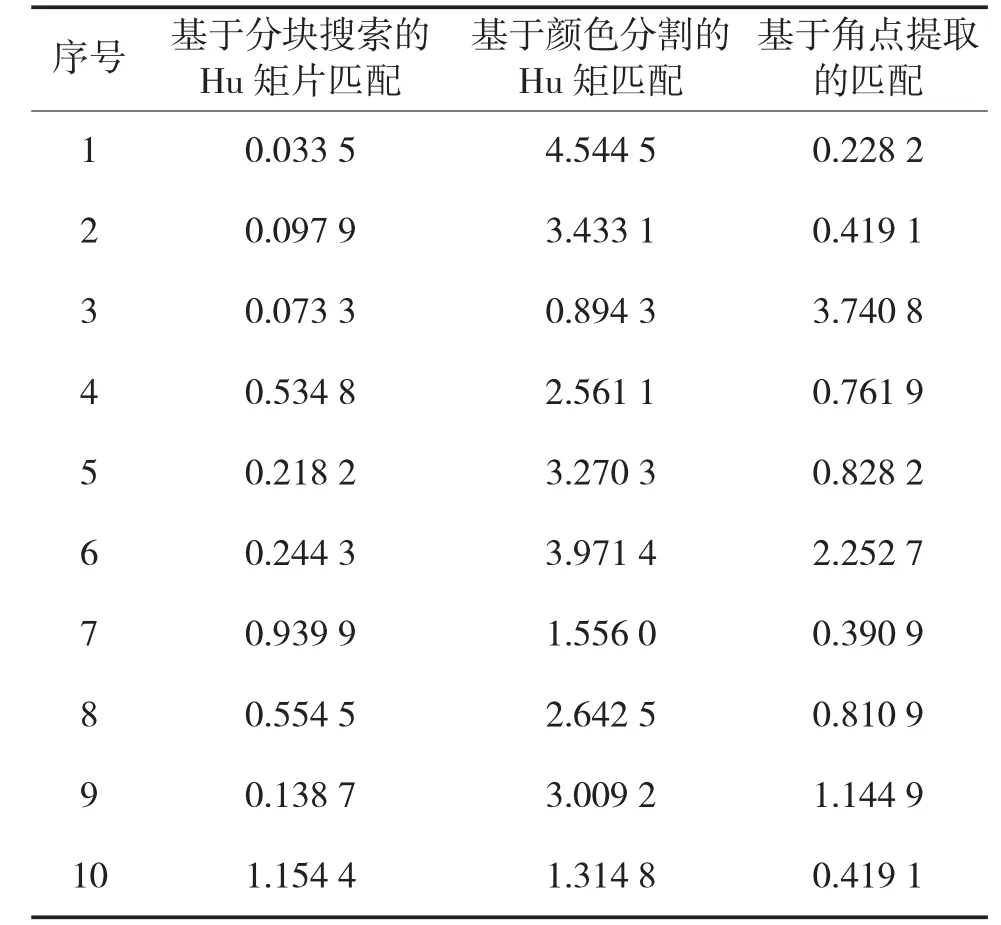
表1 3 种方法识别误差对比
绘制折线对比图如图7 所示。
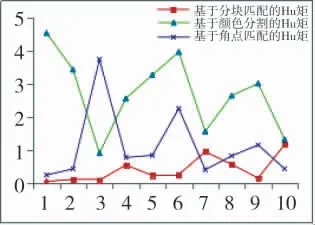
图7 方法误差对比图
由数据对比以及折线图分析得出,先通过颜色特征对图片进行分割而后用Hu 不变矩进行识别的方法,文献[1-2]中采用了大红色的标志,放到简单环境中对其进行提取,可以较好地选择阈值进行滤波、提取与匹配,而当采用黑白相间的标志放到复杂环境下即无法通过颜色特征进行分割,效果较差。基于角点提取与匹配方法的识别率不稳定且识别的准确性多数情况低于基于分块匹配的Hu 矩匹配识别方法。
对于基于分块匹配的Hu 矩匹配识别方法,当距离较远时对着舰标志可以较好地识别,但是仍有轻微的误差,随着距离的逐渐接近,识别的精度也不断增加,当视觉传感器距离着舰标志距离较近时对着舰标志定位的精度可以达到着舰要求。
3 结论
本文针对视觉传感器对着舰标志识别定位的问题,总结了目前比较成熟的方法,综合已有的技术,通过仿真复现的结果分析各自的优缺点,并改进了基于Hu 矩的识别方法。在进行实验的过程中,通过不变矩理论获取着舰标志及测试图像的7 个Hu 不变矩特征向量,并进行比较和迭代,得到最优区域。在这过程中,应用Matlab 对特征图案展开匹配识别并与同类方法进行对比。最终的结果表明,对于复杂环境下一般特征的着舰标志进行识别,基于分块匹配的Hu 不变矩效果优于同类算法。为后续无人直升机自主着舰的研究打下坚实的基础。但是,由于仿真计算机性能的限制还不能满足无人直升机识别着舰标志过程中对实时性的要求,而且在距离比较远的时候偏差相对较大。所以,后续将重点针对时间优化问题以及远距离识别精度的问题展开研究,以获得更好的识别效果。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
体育教学(2022年4期)2022-05-05 21:26:58
高技术通讯(2021年3期)2021-06-09 06:57:48
山东农业工程学院学报(2020年12期)2020-03-19 01:58:44
启蒙(3-7岁)(2019年5期)2019-06-27 07:24:50
漫画月刊·哈版(2019年4期)2019-04-18 16:22:32
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
湖州师范学院学报(2016年2期)2016-08-21 13:50:52
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:19