新一代人工智能交通信号控制器架构研究
2019-11-14 05:04:26张立立
重庆交通大学学报(自然科学版) 2019年11期
张立立,王 力
(北方工业大学 城市道路交通智能控制技术北京重点实验室,北京 100144)
0 引 言
作为理论与技术创新应用的重要领域,城市智能交通长期得到国内外学者的重点关注,人工智能、云计算、大数据、网联交通、自动驾驶、智慧感知、边缘计算等一大批理论与技术得以快速发展,尤其是人工智能已经在交通状态识别、交通流预测、交通数据分析、车牌识别、自动驾驶与网联交通中被广泛使用,但关于人工智能在交通控制方面的研究进展缓慢。因此,笔者就人工智能在城市智能交通领域的研究情况以表1中的条件对智能交通领域内重要期刊近5年的研究成果进行了检索,共检索文章316篇。
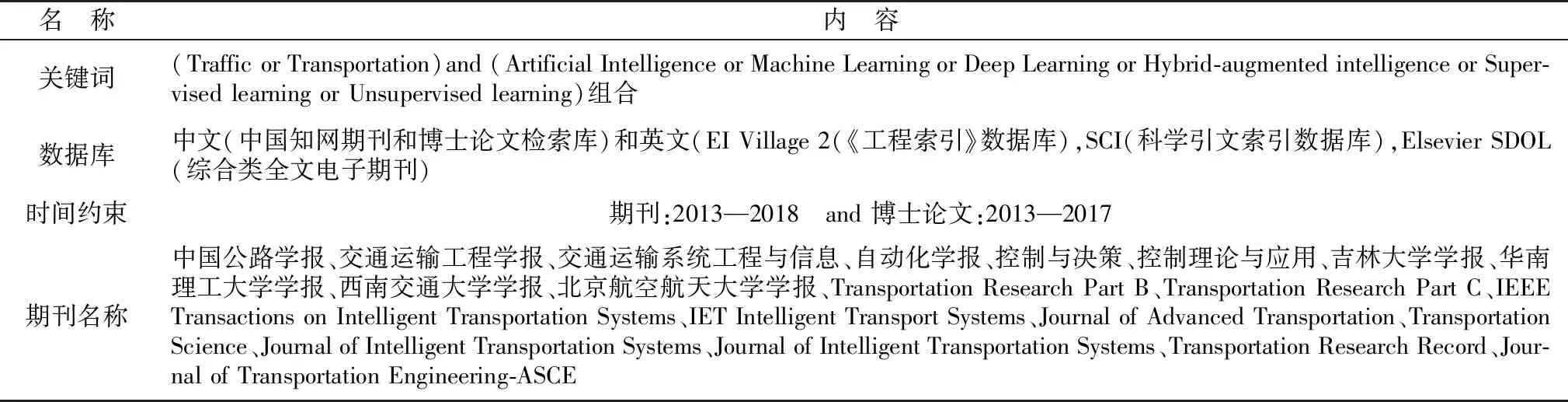
表1 国内外期刊检索条件Table 1 Search conditions of journals at home and abroad
分析并总结文献检索信息,结果表明:人工智能在城市智能交通领域中的研究主要集中在交通状态估计、交通参数预测、图像识别、车联网与自动驾驶、交通数据处理、交通系统与控制等6个方向,其中交通系统与控制的研究成果主要集中在英文期刊,如图1~图3。
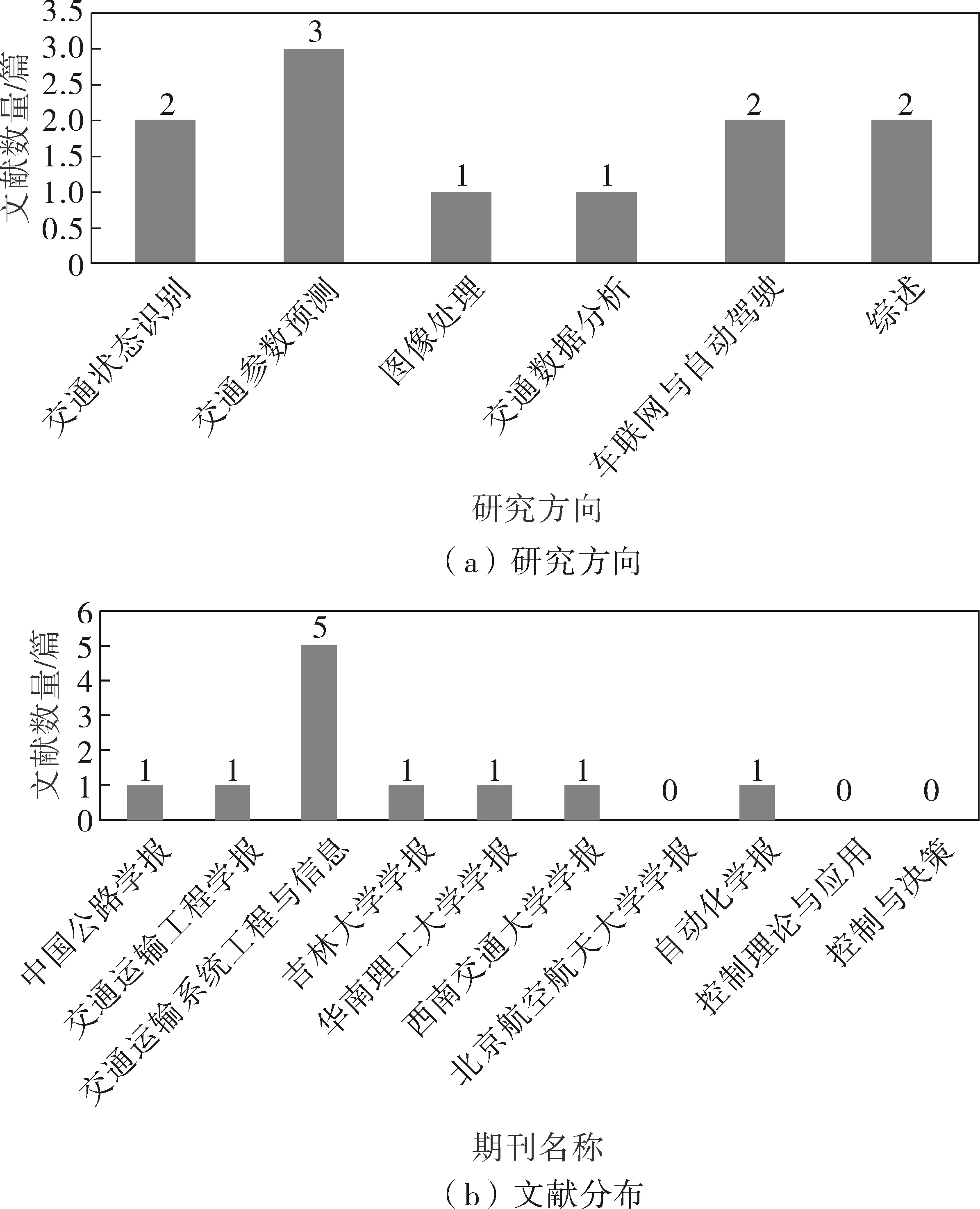
图1 国内期刊检索结果Fig. 1 Domestic journal search results
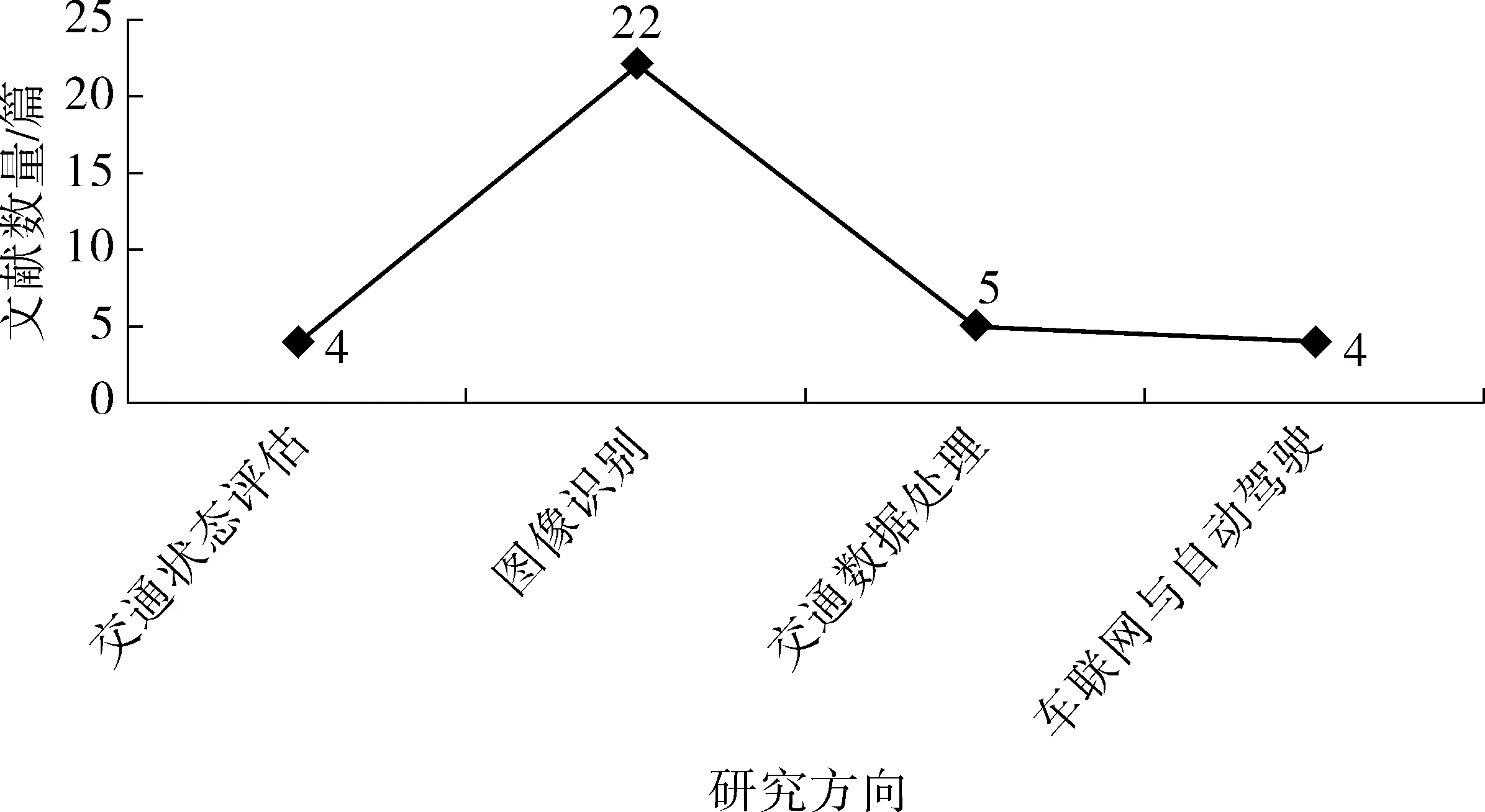
图2 国内博士论文检索结果Fig. 2 Domestic doctoral thesis search results
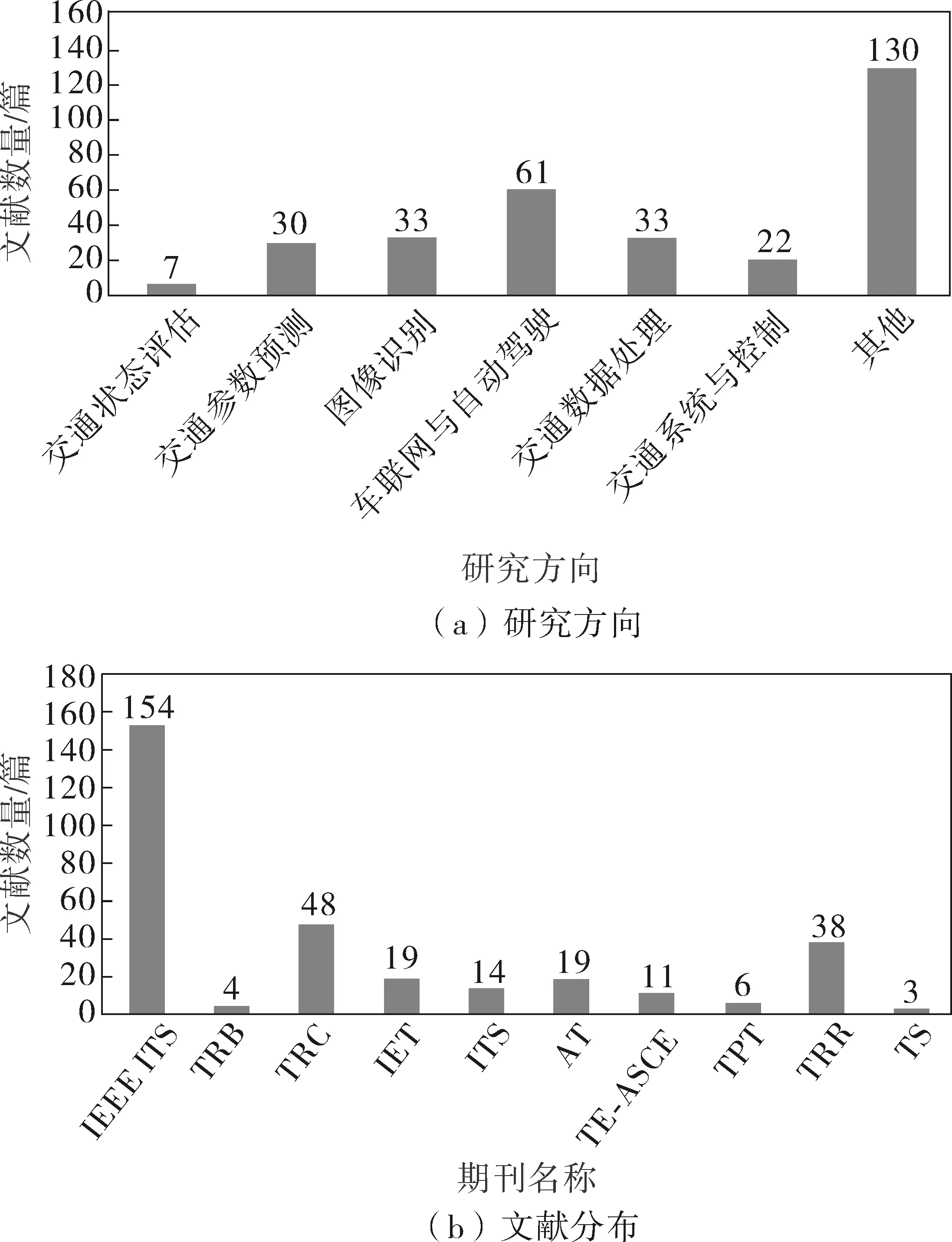
图3 国外期刊检索结果Fig. 3 Foreign journal search results
针对检索到的22篇有关人工智能在交通系统与控制研究方向应用的文章进一步分析,发现其中60%的文章关注于人工智能在宏观交通系统管理方面的应用,其余40%的文章则是在传统交通理论和模型基础上,利用人工智能算法实现信号控制决策,但该领域内的持续性研究较少,究其原因可能包括以下4个基本问题:
1)传统交通信号控制理论存在制约性
传统交通信号控制体系的形成与当时技术形态密不可分,包括电子计算机、控制器等的周期性运行,其目标为保障车辆通行安全[1],其形成了以周期、绿信比、相位差的时间参数和相位、相序的空间参数为特征的交通控制理论。尤其是在欧美国家所制定的标准体系中,如NEMA-TS2等,已将其作为标准化定义运用于交通控制软、硬件逻辑设计中。虽然我国也制定了包括GB25280—2016等国家标准,但是目前行业内的遵从度并不高。交通信号控制理论自建立至今,其基础体系变化不大,其主要创新集中在优化算法或控制方法上。然而,传统交通信号控制理论体系未能匹配上人工智能在该领域的发展要求,其中最为关键的传统交通控制理论中的相位相序的不变性成为最大的瓶颈。可以说人工智能算法或其应用领域的局限性与传统交通信号控制的局限性的碰撞,在备受束缚的交通信号控制体系中,无法发挥其真正的能力。
2)支撑人工智能算法的计算能力、存储能力和网络能力的智能交通信号控制器有待研发
传统交通信号控制器的研发和设计基于传统的交通信号控制理论,目标定位于执行器,其并未考虑人工智能算法应用时所需的计算能力、存储能力和网络能力等,因此限制了人工智能在交通控制领域的实际应用。同时,面向未来的城市交通中物联网、人联网、车联网等场景在算力、仿真、存储、网络、优化等方方面的需求,交通信号控制器将以全新的形态成为边缘计算、数据汇聚、网络结合的城市关键节点。
3)传统检测数据无法全面有效表征受控交叉口交通状态并作为人工智能算法训练输入
传统交通检测数据(流量、占有率、排队长度等)能够在单一方面有效刻画当前受控交叉口的交通状态,但同时也忽略了交叉口其他方面的特征,其主要因为目前的数据多为加工后数据(第二、三手数据),已经在本质上忽略了原始数据的丰富性和扩展性。受控交叉口交通状态的辨识应满足两个条件:①当前交通状态应包含控制策略做出最优决策所需的全部信息,其为做出最优决策的基础;②没有或仅存在少量冗余、非必须的信息,其主要影响人工智能算法的学习、训练和计算的时间。
4)基于实时数据驱动的边缘仿真系统有待研发
传统交通仿真系统基于静态、后验证性的设计理念,无法应用于需要实时性演化验证的在线交通信号控制中。传统仿真软件如VISSIM,PARAMICS等仿真不够真实,主要原因是参数标定、模型标定带来的误差过大且无法根本消除。由于仿真软件产生的历史时期和当时技术条件的限制,无法获得实时、高质量的检测数据,因此需要研究和设计跟驰模型、交通流模型等,模型的假设和约束进一步削弱了仿真的真实性,但其确实促进了城市交通领域研究的进步,成为交通理论研究中重要的验证工具。未来需要利用实时检测数据和历史检测数据自动标定参数,设计无模型的仿真驱动内核,才可能从根本上解决目前交通仿真的困境。
上述4个基本问题是构建人工智能在城市智能交通控制领域理论与技术体系所需要着力解决的问题,笔者主要从边缘计算、场景驱动和交通控制资源化3个方面研究和设计新一代人工智能交通信号控制器的总体架构。
1 新一代人工智能交通信号控制器总体架构
2017年国务院发布《“十三五”国家科技创新规划》,其中专栏9针对现代交通技术与装备提出:“以提供高效、便捷、可持续交通为目标,突破交通信息精准感知与可靠交互、交通系统控制优化、城市交通控制功能提升与设计问题,促进交通运输业与相关产业的融合发展。”
未来城市交通控制应主要历经全人工驾驶交通控制、混合驾驶交通控制、全自动驾驶交通控制3个阶段。为此,在进行智能交通信号控制器研究时,既要考虑面向全自动驾驶交通控制中交通要素全连接情况,又要兼顾当前全人工驾驶交通控制的传统控制形态。笔者给出以边缘计算为基础、以场景驱动为要求、以交通控制资源化为支撑、以人工智能为核心的新一代智能交通信号控制器总体架构:首先,利用检测资源实现场景驱动并以此为系统感知;其次,以信号资源作为空间方案库,以计算资源作为支撑实现基于人工智能的信号控制策略作为系统决策;最后,通过道路资源完成决策目标作为系统的执行,如图4。
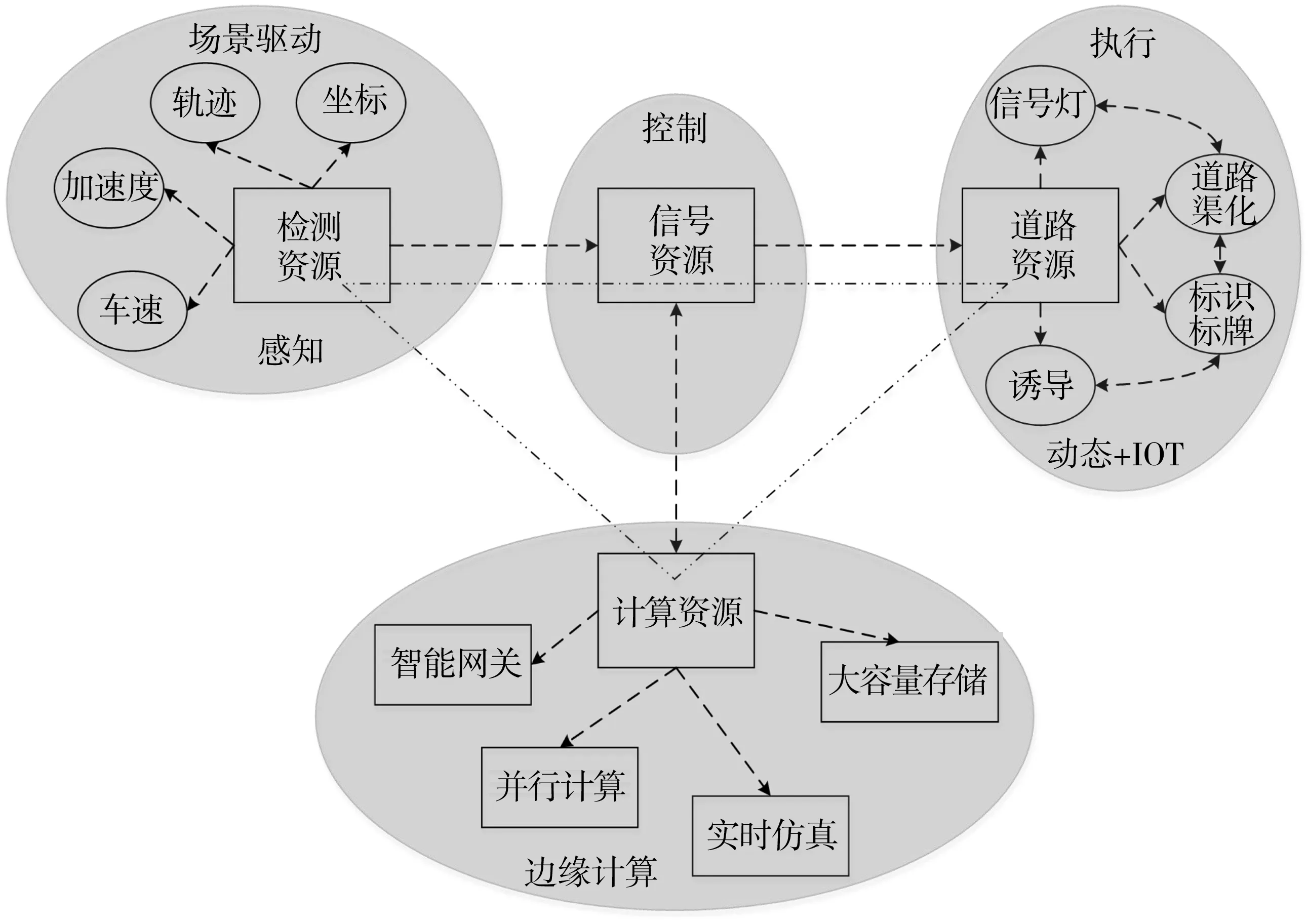
图4 新一代人工智能交通信号控制器总体架构Fig. 4 Overall architecture of a new generation of artificial intelligence traffic signal controller
1.1 边缘计算架构
边缘计算定义为在靠近物或数据源头的网络边缘侧,融合网络、计算、存储、应用核心功能的开发平台,就近提供边缘智能服务,满足行业数字化在敏捷联接、实时业务、数据优化、应用智能、安全与隐私保护等方面的关键需求[2-3]。边缘计算是近年来伴随着IOT(internet of things)技术成熟及智能设备大规模部署而产生的,其作用在于弥补以云计算模型为核心的集中式大数据处理关键技术不能满足对边缘设备所产生数据的高效处理,重点解决4个关键问题:①线性增长的集中式云计算能力无法匹配爆炸式增长的海量边缘数据;②从网络边缘设备传输海量数据到云中心致使网络传输带宽的负载量急剧增加,造成较长的网络延迟;③网络边缘数据涉及个人隐私,使得隐私安全问题变得尤为突出;④有限电能的网络边缘设备传输数据到云中心消耗较大电能[4-7]。
智能交通控制器作为城市道路交通控制的关键节点设备,为交通控制提供检测数据接入与处理、控制策略计算与执行、网络传输与协议转换和数据存储与数据安全等功能。但目前国内外学者和企业在智能交通控制器研究和开发上的滞后,导致其难以满足城市交通控制在实时性、计算力、网络吞吐等方面日趋提高的要求。同时,人工智能在城市交通的关键节点控制中的应用,也同样面临算力不足、存储不够等问题。边缘计算在架构设计上的优势正好契合当前及未来城市交通控制与人工智能对智能控制器的要求。为此,笔者采用边缘计算架构设计新一代人工智能交通信号控制器。
如图5,在烟花模型(firework)[8]的通用架构上设计了交通烟花模型(T-firework)架构,其主要包括烟模型管理器(firework manager)和烟花模型节点(firework node)两部分。烟花节点将检测数据、道路数据、执行端数据、决策与算法、仿真等纳入其中,可实现大数据实时分布式共享和处理,并使私有数据可在数据利益相关者的设备上处理以保障数据安全性。烟花模型通过创建虚拟的共享数据视图,融合了物理分布上的各类数据源,而数据利益相关者(烟花模型节点)为终端用户提供一组预定义的功能接口以便用户访问[6]。
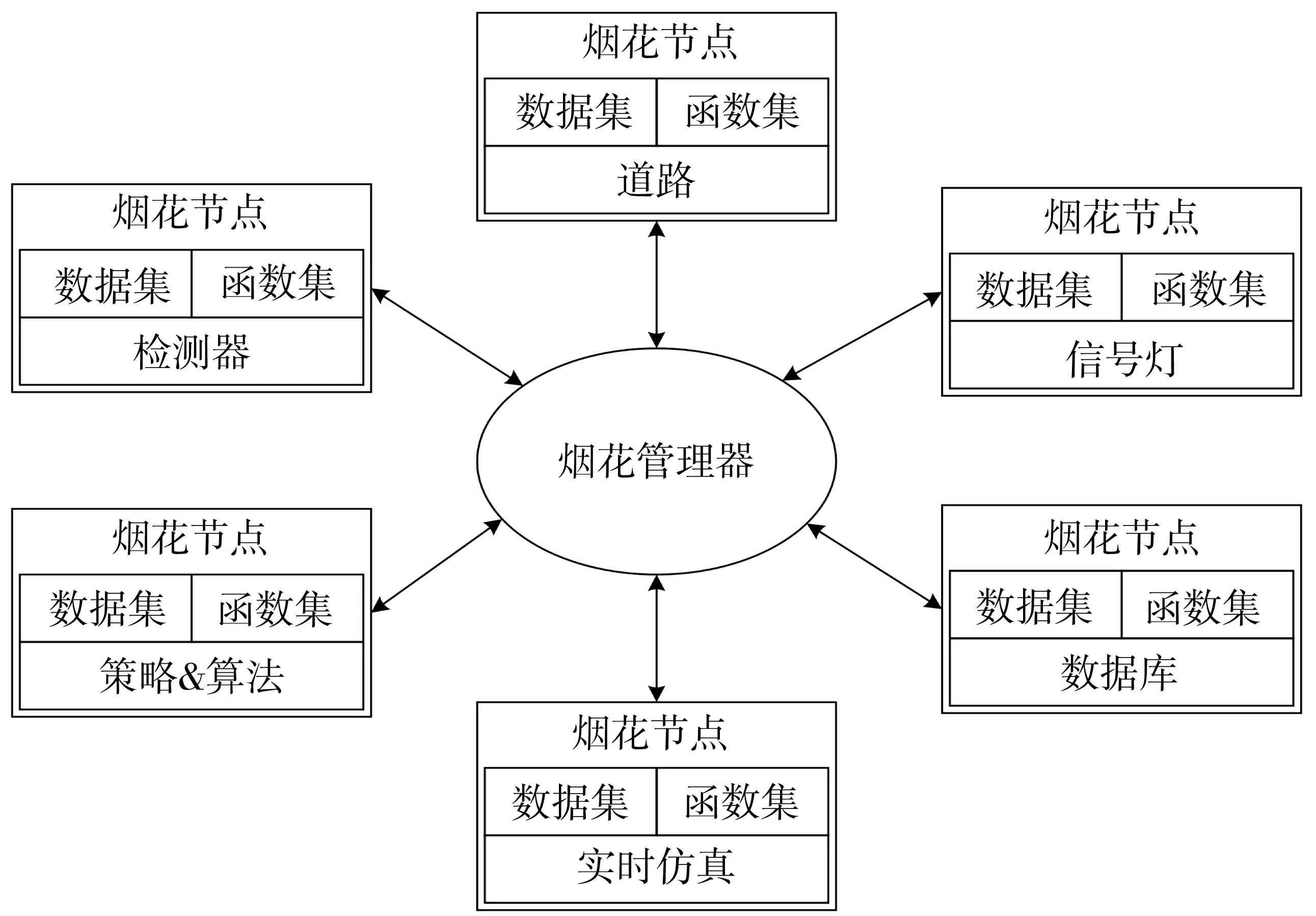
图5 T-烟花模型Fig. 5 T-Firework model
1.2 场景驱动架构
传统交叉口控制策略的实施一般将普通控制(欠饱和、饱和)与特殊控制(公交优先、有轨电车、应急救援等)分开考虑。针对普通控制利用交通状态判别可以实施饱和控制或欠饱和控制;特殊控制基于部署的特殊检测手段实施有针对性的检测和控制。但在同一时空下分割的控制方法,未能充分考虑具有关联性的实际交通需求的构成,难以反映受控交叉口的多层次交通状态。因此,有必要提出一种能够统一表征多维度交通需求与控制策略之间映射关系的方法。
交通场景定义为交通需求到交通控制策略的映射,是实施经精准控制策略的先决条件,如图6。
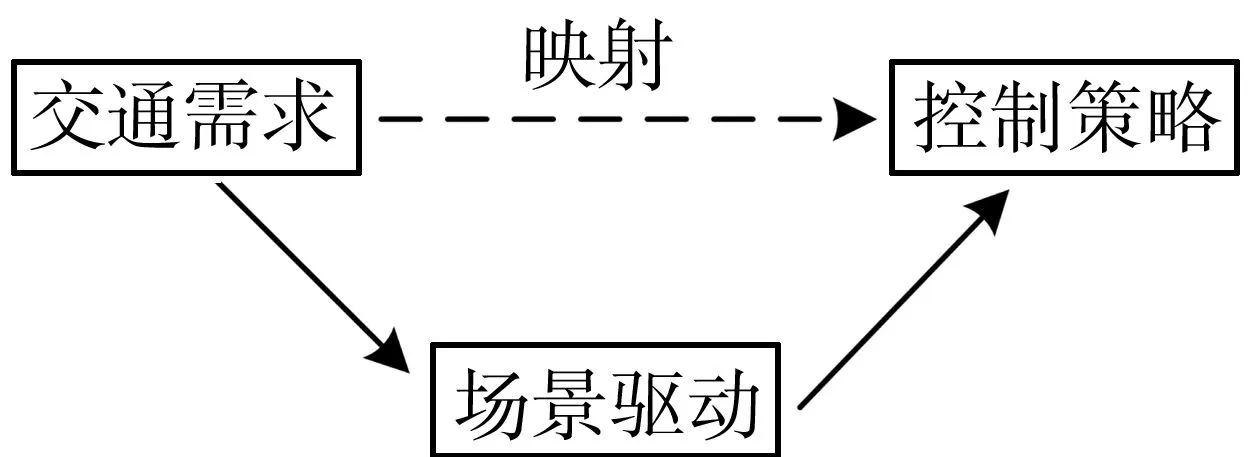
图6 场景驱动的定义Fig. 6 Definition of scene driven
考虑采用五元组的形式描述交通场景,如式(1):
S=(R,M,P,B,O)
(1)
式中:R为原始数据的集合,具体有瞬时速度、加速度、坐标、轨迹、ID等;M为原始数据到交叉口连接路段的映射,描述为离散交通状态编码;P为利用原始数据加工所得的指标数据;B为基础层场景,包括交叉口过饱和与欠饱和两种状态;O为叠加层场景,包括溢流、公交优先、有轨优先、应急救援等非常发性交通需求引起的场景,如图7。
传统检测数据多加工数据,难以有效支撑上述方法,因此笔者所提方法采用新型检测手段,如广域雷达、车联网等能够提供R所需数据形式的检测方式。
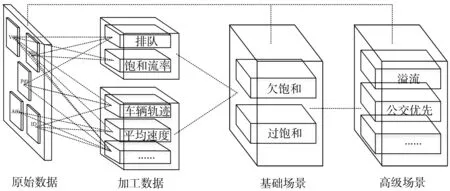
图7 交通场景分层结构Fig. 7 Traffic scene hierarchy
1.3 交通控制资源化架构
交通控制资源化定义为将交通控制中的各类要素进行资源化,并以资源的形式重新组合与使用。交通控制资源化的结果是可以将城市交通控制描述为一类存在不确定性时最优动态资源分配的科学问题[9]并加以分析,且可以充分利用控制科学、人工智能科学中的已有方法作为有力工具进行研究。交通控制资源的类型如表2。
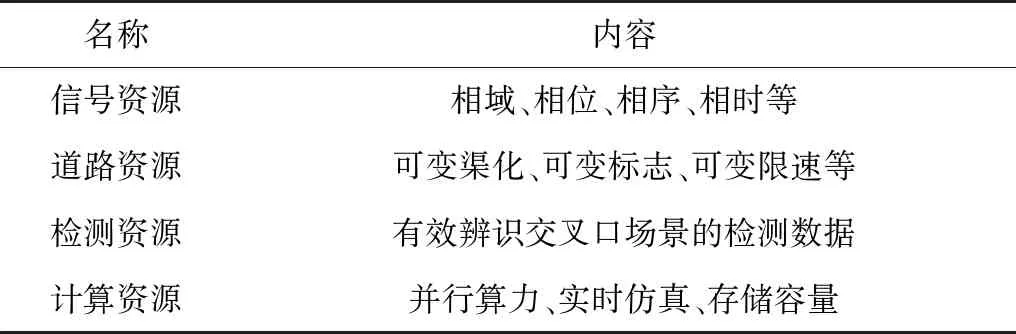
表2 交通控制资源Table 2 Traffic control resource
由表2可知,交通控制资源化带来如下变化:
1)信号资源化和道路资源化通过影响交通流实现供-需的改变,进而影响路网的O-D路径。
2)检测资源化突破传统检测参数不能充分有效表征受控交叉口场景特性的问题,其立足人工智能的感知、辨识等方法,提出了有效参数映射至场景的方法。
3)计算资源化为人工智能的应用解决了算力问题、存储问题;检测资源化解决了其感知应用的问题;信号与道路资源化解决了其决策应用的问题。
设计交通控制资源化架构时,考虑到在实际应用中对传统交通信号控制体系兼容性的问题,提出了平行架构设计方案,如图8。在平行架构中,针对具有共性特征的检测部分和信号基础部分建立连通:首先由于resourcing architecture采用了检测数据的原始数据(raw data)作为输入数据,因此可利用原始数据加工得到traditional architecture中所需的统计数据(processed data),如流量、占有率、区域平均车速等;其次,traditional architecture中的信号基础(相位、相序、周期、绿信比、相位差等)包含于resourcing architecture中,设计时考虑其为一类具有特殊性的信号基础。
为保障车辆通行安全,信号基础部分设计时遵循交通冲突理论和最小相位时间要求。
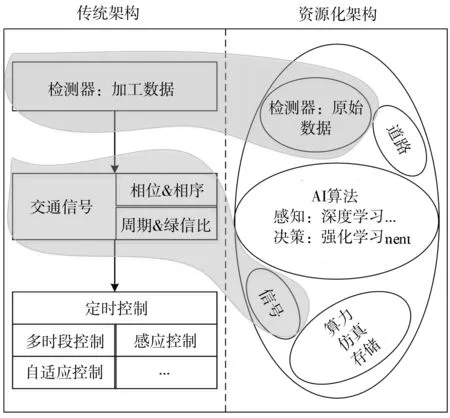
图8 平行架构Fig. 8 Parallel architecture
2 新一代人工智能交通信号控制器软硬件架构
在总体架构基础上,设计了智能网关和算力平台。其中智能网关主要考虑多类型、不同协议的外设接入要求,提供协议汇聚与标准转换功能;算力平台主要包括控制器硬件结构、控制策略框架和实时仿真,提供人工智能算法实现的基础条件。
2.1 智能网关设计
智能网关不但为提供交通信号控制器提供强大的网络吞吐能力,还提供多种检测、控制等设备的接入协议汇聚和标准转换功能,如图9、图10。其中:为保证网络联接需要满足传输时间确定性和数据完整性,采用IEEE制定的针对实时优先级、时钟等关键服务定义的统一技术标准TSN(time-sensitive networking)[2-3];当前国内交通领域的检测及控制设备的接口及协议不统一等问题为设备接入、数据使用带来很大困难,为此使用SDN(software-defined networking)[2-3]设计,将网络的控制平面与数据转发平面进行分离,实现多非标准协议的汇聚及转换的可编程化控制。
智能网关不但为交通信号控制器提供强大的网络吞吐能力,还提供多种检测、控制等设备的接入协议汇聚和标准转换功能,如图9、图10。智能网关是设备连接和数据交换的核心,包含4层结构,如图9。考虑到当前交通控制器通讯协议的非标准现状,还设计了多种协议汇聚与标准转换的接口,如图10。

图9 智能网关结构Fig. 9 Intelligent gateway architecture
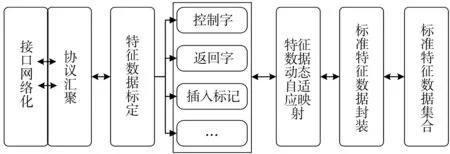
图10 协议接口汇聚及转换Fig. 10 Protocol interface convergence and conversion
2.2 算力平台设计
2.2.1 智能交通信号控制器硬件结构
智能交通信号控制器平台依托Xilinx的Zynq©-7000解决方案实现,其特点在于搭载一颗xc7z030Soc FPGA芯片,片内由主频为1 GHz的双核ARM Cortex-A9 MPCore处理器与FPGA共同构成,两种架构的芯片相对独立,便于片内资源的调度和使用。其中,FPGA部分提供的BRAM、DSP、FF及LUT等资源数据量分别为9.3 Mb、400个、157 200个及78 600条的规模[10],能够满足边缘计算中对并行计算能力的要求。同时,ARM处理器的引入提升了软件定义控制策略的能力。智能交通信号控制器软件基于DM2016分布式计算平台设计,部署在定向裁剪的Linux操作系统上,使其具有良好的可靠性和扩展性,如图11。其特点还包括以下4点:①高性能的FPGA芯片提供并行计算和万级门电路规模,可支持多种扩展需求;②提供算法硬件化能力,通过FPGA门电路实现控制逻辑和算法,提高算法执行能力和稳定性;③通过高性能的内核ARM处理器和Linux操作系统,实现对控制逻辑的扩展和提供可编程API接口;④通过有效封装的驱动层,可提供数据驱动、计算驱动、控制驱动和网络驱动等能力。
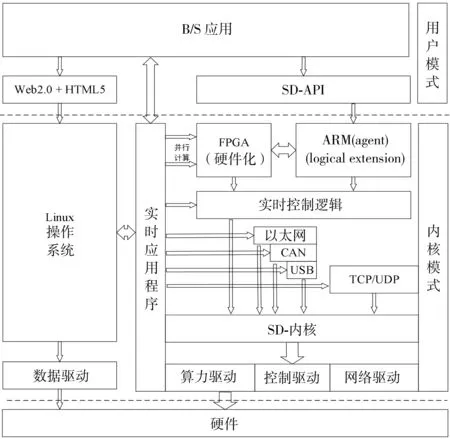
图11 智能信号控制器硬件结构Fig. 11 Intelligent signal controller hardware structure
2.2.2 控制策略框架
为支撑场景驱动和交通控制资源化的要求,在设计智能交通信号控制器控制策略组成时,采用SD(scene driven,software definitions——“场景驱动,软件定义”)控制策略数据流框架,如图12。通过智能网关中协议接口汇聚及转换,将输入输出数据与控制策略分离,实现针对任何交通场景的抽象和构建;再通过虚拟化代理驱动引擎和标准的编程模板,完成对所需任务控制逻辑的快速开发。
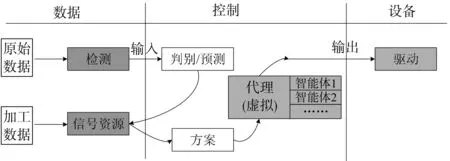
图12 SD控制策略数据流Fig. 12 Data flow of control strategy based on SD structure
2.2.3 实时仿真设计
以历史数据为基础,实时数据为输入的数据驱动实时仿真是人工智能在城市交通控制中应用的必要基础。其设计的基础考虑到仿真参数的标定及实时性问题,提供了自适应参数快速标定和无模型驱动方式,并且通过边缘计算提供的算力为多类型控制策略提供实时仿真和演化仿真。其中,自适应参数标定体现在利用图6提供的检测资源形式和检测器类型,可以标定包括车道、路宽等静态参数和车速分布、车头时距、车型分布等动态参数;并且其交通流特性和跟驰特性基于历史检测数据累积,实时检测数据修正得到。实时仿真功能结构如图13。
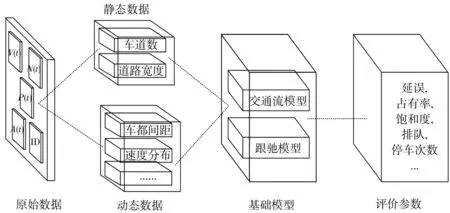
图13 实时仿真功能结构设计Fig. 13 Design of real-time simulation function structure
3 新一代人工智能交通信号控制器进一步应着力解决的问题
3.1 实时故障诊断与预测性维护
智能交通控制器运行的可靠性是城市交通控制与管理充分发挥作用的保障。目前国内外的运维多采用人工巡检、故障被动上报等手段,存在故障诊断的滞后性和高维护成本等问题。因此,考虑在边缘计算架构的硬件层、通讯层、数据层等均设计异常发现探针,对设备的全生命周期进行监测并对数据异常实现告警处置。其采用边缘与云协同的运维方式,通过本地的边缘计算融合网关提供数据分析能力,第一时间发现设备潜在故障,同时提供本地存活,一旦与云端联接故障,数据可以本地保存,联接恢复后,本地收敛数据自动同步到云端,确保云端对所有设备的完整视图。同时预测性维护还可以减少维护工作量,降低维护人员劳动强度;提高设备的可靠性,延长设备的使用寿命;提高设备的利用率,减少维修费用,从而降低维护成本[1]。
3.2 交通数据安全与防护
智能交通信号控制是连接交通参与者的重要城市道路交通关键节点设备,其不但承担控制策略的执行,同时也实时获取和传输各类型交通信息。在网联交通的背景下,以其为关键节点的输入输出数据安全必须予以重视。以信号控制器为攻击主体,可分为4类(图14):①信号控制器作为主体直接被攻击(不通过其他扩展设备);②扩展设备为跳板,攻击信号控制器(检测器);③外接设备为跳板,攻击信号控制器(车联网-信号控制器);④信号控制器为跳板,攻击外接设备(信号控制器-车联网)。为此,设计信号控制器时需充分考虑数据安全形态与软硬件架构,有效起到防护作用。

图14 交通数据安全应用场景分类Fig. 14 Classification of traffic data security application scenario
3.3 基于人工智能的感知与决策算法库
边缘计算、场景驱动和交通控制资源化是人工智能与城市交通控制结合的基础。考虑到城市交通控制涵盖感知、决策、执行3个层面,因此需要研究基于监督学习算法的场景感知、基于无监督学习的交叉口空间方案选择、基于深度强化学习的信号控制策略和考虑“人在回路”的交叉口混合增强智能控制决策方法等系列问题,建立基于人工智能的城市受控交叉口的感知与决策算法库,满足时变交通需求下具有高复杂性的交通控制要求。同时,利用FPGA的可编程逻辑门电路实现算法的硬件化,进一步提升人工智能算法的训练和运算速度,使其具备快速训练、实时仿真、精准决策的能力。
4 结 语
面向满足以人工智能为基础的城市混合驾驶交通控制、全自动驾驶交通控制、多元化公共交通控制、应急救援交通控制等应用需求,提出了基于边缘计算、场景驱动和交通控制资源化的新一代人工智能交通信号控制器的架构和设计理念。通过所提的场景驱动、交通控制资源化的全新概念,突破了传统交通控制理论对人工智能应用的制约,同时利用边缘计算和SD的理论与技术设计的智能网关、算力平台等又为人工智能算法的应用提供了计算能力、仿真能力、通信能力和存储能力,有效提高实现的可能性。下一步需要着力解决的理论与技术问题,在新一代人工智能交通信号控制器研究框架下被充分考虑。研究结果为人工智能在城市交通控制领域的应用提供了基础支撑和研究思路。
猜你喜欢
中国化肥信息(2022年9期)2022-11-23 07:55:32
石材(2022年2期)2022-05-25 13:04:14
能源工程(2020年6期)2021-01-26 00:55:22
铁道通信信号(2020年8期)2020-01-05 20:30:18
山东冶金(2019年3期)2019-07-10 00:54:04
铁道通信信号(2019年1期)2019-01-16 00:45:15
铁道通信信号(2018年6期)2018-08-29 01:16:18
消费导刊(2018年10期)2018-08-20 02:57:02
中国资源综合利用(2017年4期)2018-01-22 02:46:42
发明与创新(2016年34期)2016-08-22 03:00:54