
水下航行器的悬停与回旋特性研究*
2019-11-13 03:00沈建锋
弹箭与制导学报 2019年3期
刘 曜 ,沈建锋
(1 中国船舶重工集团公司第713研究所, 郑州 450015; 2 河南省水下智能装备重点实验室, 郑州 450015;3 中国人民解放军海军装备部, 北京 100000)
0 引言
水下航行器可应用于海洋探测、海底管路维修、海洋打捞等工作,有效地解决了人们深海作业的难题。海洋探测、打捞等作业活动,需要水下航行器具备稳定的悬停能力和回旋特性,因而文中针对水下航行器的悬停和回旋特性进行了仿真研究。
1 水下航行器六自由度操纵性方程
1.1 坐标系定义
航行器坐标系:坐标原点位于航行器浮心,ox轴与纵轴重合指向航行器头部,oy轴居于纵对称面,指向上方。地面系:坐标原点在航行器初始运动时浮心对应水面位置,ox0轴指向初始运动方向,oy0轴铅垂向上。速度系:坐标原点位于浮心,oxv轴始终与速度矢量方向重合,oyv轴在航行器纵对称面,指向上方。
以上3种坐标系均为右手直角坐标系,z轴由右手法则确定。
1.2 动力学方程
动力学方程组在航行器系中建立,航行器系的原点位于水下航行器浮心。设航行器运动的角速度ω及浮心处的速度ν在弹体系中的3个分量分别为ωx、ωy、ωz、νx、νy、νz;航行器的质量为m;质心在弹体系中的坐标为(xc、yc、zc),根据动量和动量矩定理[1-2]:
(1)
式中:Fx、Fy、Fz、Mx、My、Mz分别为作用在航行器上的外力F和力矩M在航行器系中的3个分量,包括理想流体惯性力、流体粘性位置力、流体粘性阻尼力、浮力、重力、轴推螺旋桨推力、垂推旋桨推力、侧推旋桨推力和舵力(矩)。图1给出了水下航行器结构示意图。
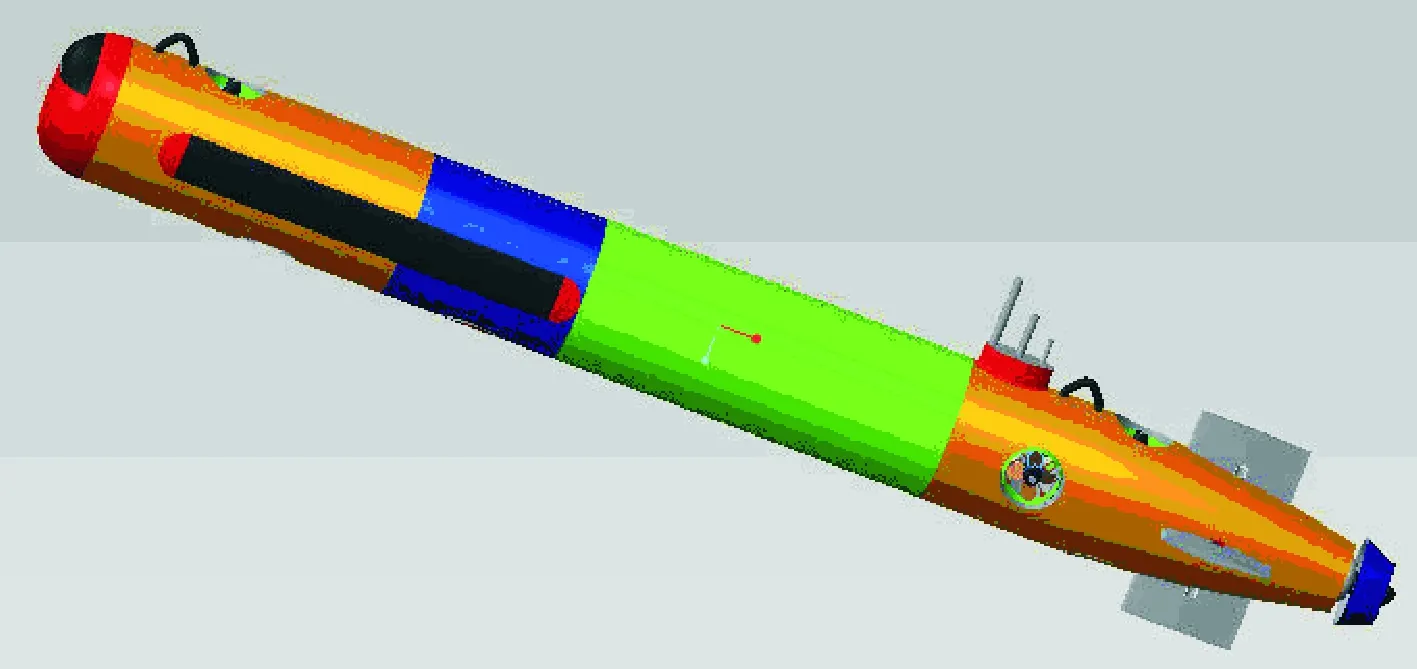
图1 水下航行器结构示意图
1.3 运动学关系式
水下航行器转动是由3个姿态角(俯仰角θ、偏航角ψ、横滚角φ)描述,转动角速度(在航行器系分量为ωx、ωy、ωz)与3个姿态角变化率的关系式即为航行器转动的运动学关系式:
(2)
水下航行器浮心运动关系式、攻角和侧滑角关系式与方程(1)和(2)组成封闭可解方程。具体内容参见文献[3]。
2 水下航行器悬停
2.1 悬停状态仿真
针对水下航行器零浮力(浮力重力差为零)、零航速、零重心侧移量情况下的悬停状态进行仿真,仿真时间100 s[4],悬停状态仿真结果见图2、图3。
2.2 重心侧移量对悬停状态的影响
针对水下航行器零浮力、零航速、0.1 cm重心侧移量情况下的悬停状态进行仿真,仿真时间100 s,重心侧移量对悬停状态的影响仿真结果见图4、图5。
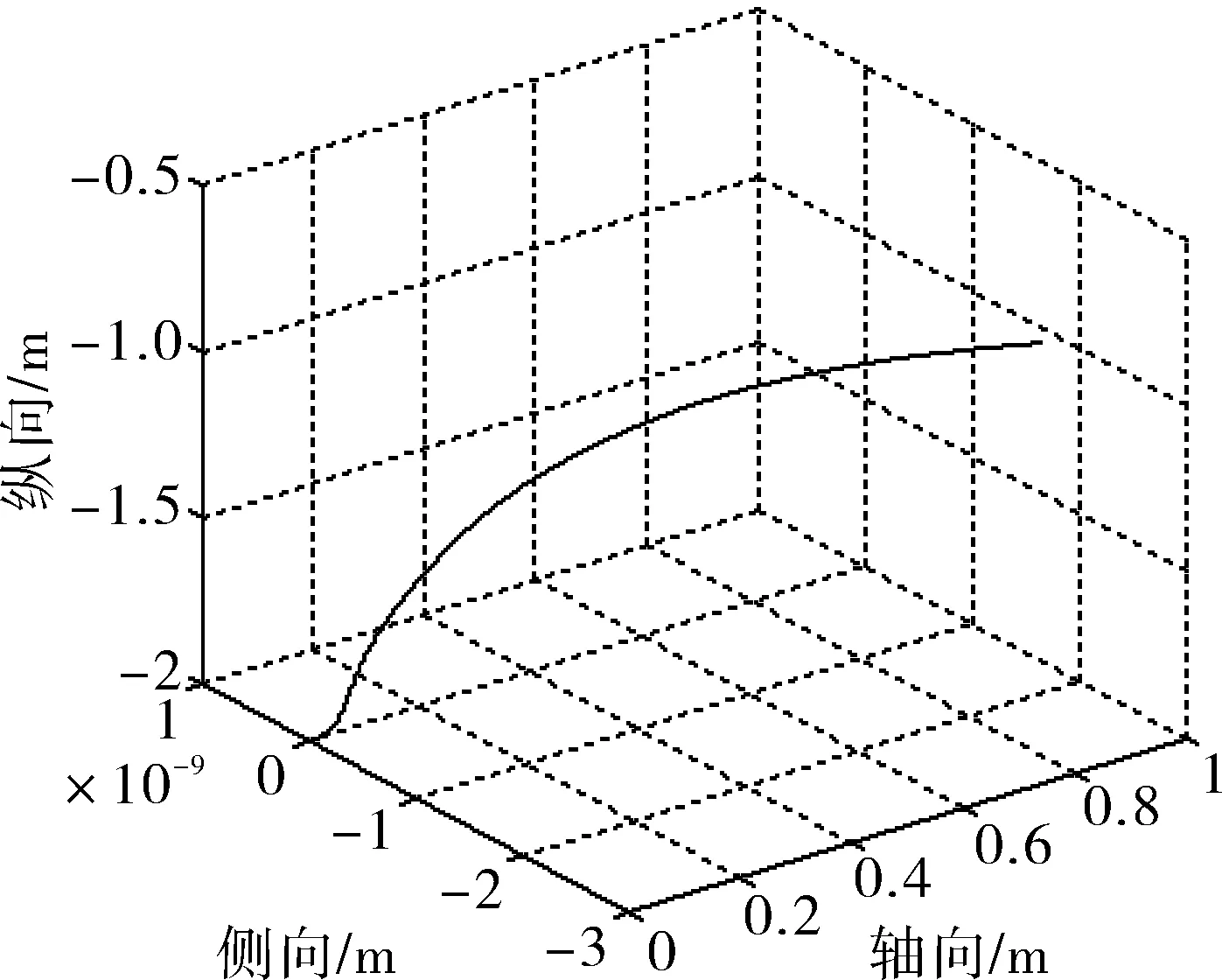
图2 悬停状态的空间运动曲线
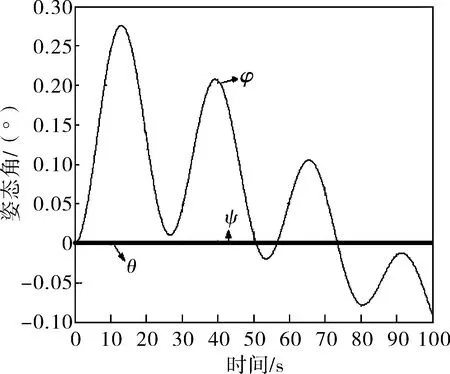
图3 悬停状态的姿态角曲线
2.3 悬停状态仿真结果分析
根据水下航行器悬停状态仿真结果可得:
a)在零浮力、零航速、零重心侧移量的状态下,航行器在水中具有保持固定水深和稳定的姿态的能力。在100 s的仿真时间内,航行器在轴向位移小于1 m,深度方向位移也小于1 m,侧向基本不存在位移;航行器的俯仰角θ、偏航角ψ基本在0°不变,横滚角φ在±0.3°间摆动。因而,只需要控制轴推螺旋桨、垂推螺旋桨间歇工作,就可实现水下航行器的定点悬停。
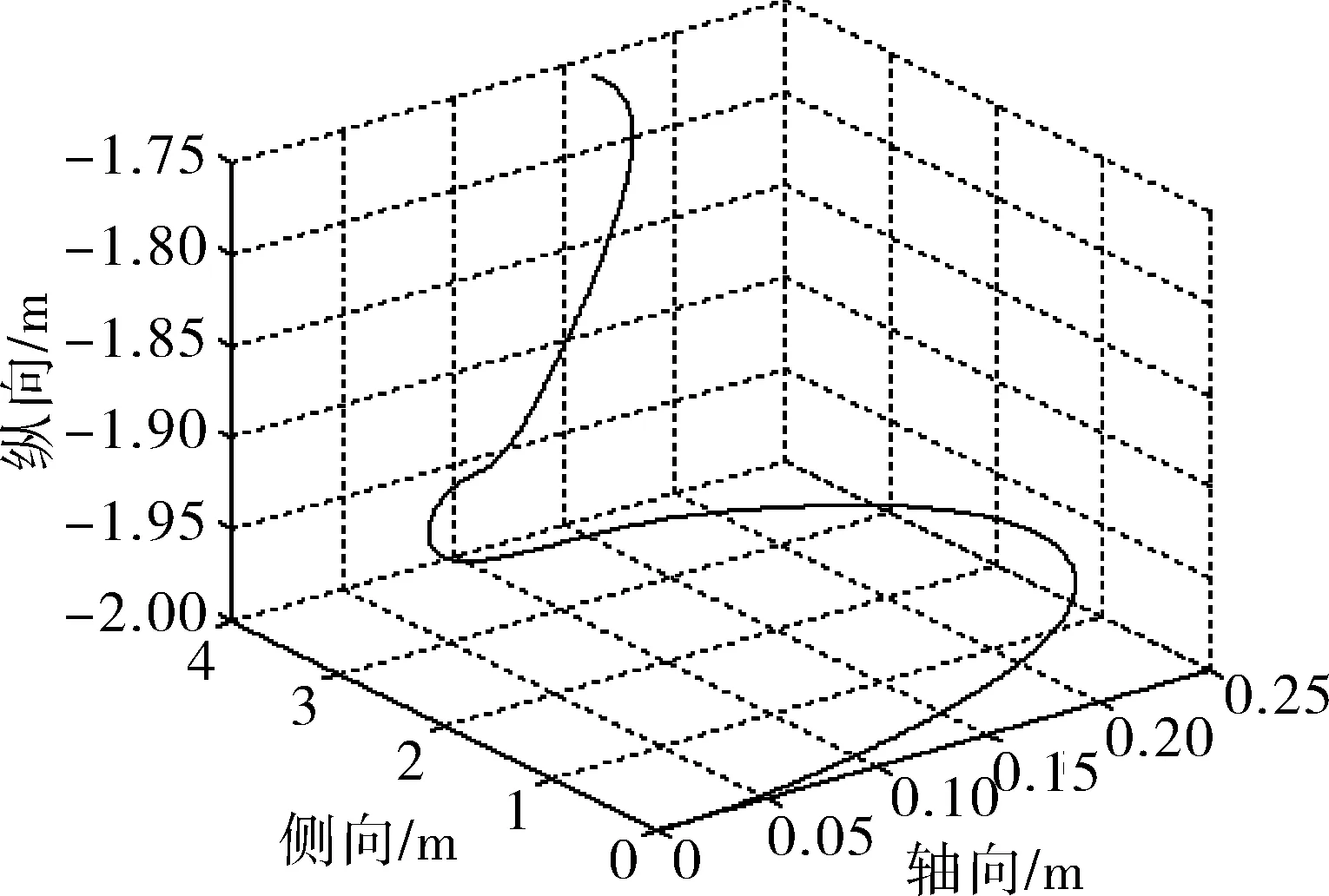
图4 悬停状态的空间运动曲线(0.1 cm重心侧移量 )
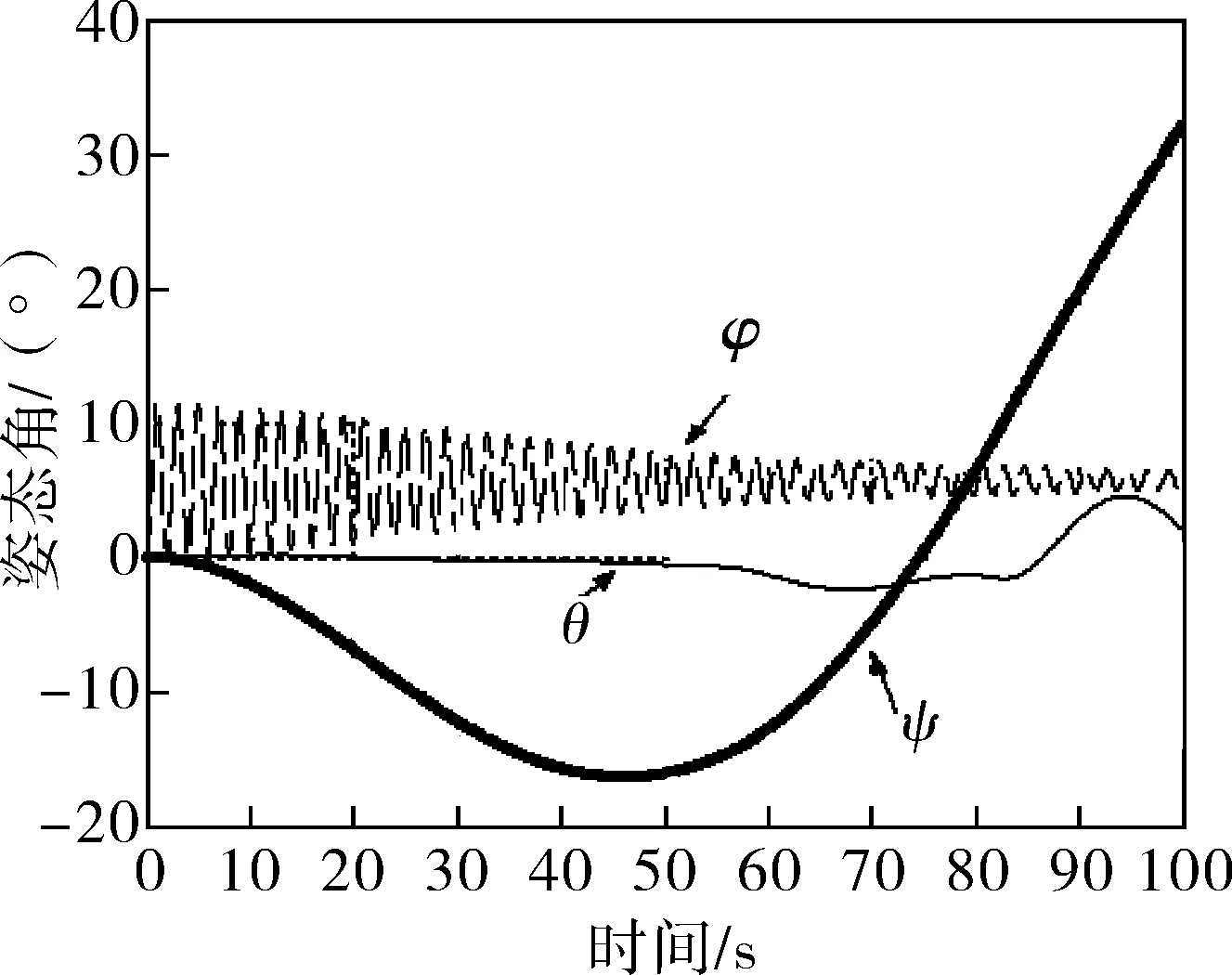
图5 悬停状态的姿态角曲线(0.1 cm重心侧移量)
b) 在零浮力、零航速、0.1 cm重心侧移量的状态下,航行器在水中同样具有保持固定水深的能力。在100 s的仿真时间内,在轴向位移、深度方向位移也小于0.25 m,但由于重心侧移量的影响,侧向位移增大到4 m;同样由于侧偏影响,航行器的俯仰角θ在-2°~6°间变化,偏航角ψ的变化范围增大到-18°~32°,横滚角在±12°间摆动且逐渐衰减。由此可见重心侧移量对航行器悬停的偏距和偏航角有一定的影响,但航行器状态是稳定、可控的。只要控制螺旋桨、舵联合间歇操控即可完成水下航行器的定点悬停。
3 水下航行器回旋特性
3.1 水平回旋状态仿真
水平回旋状态是水下航行器重要的一种运动模式,回旋半径、时间和回旋一周深度变化是航行器重要的特性参数[5-6]。针对5 N负浮力、航速3 kn、水平舵-1°、垂直舵25°的水平回旋状态进行了仿真。仿真时间200 s,水下航行器保持水平回旋状态,仿真结果见图6。
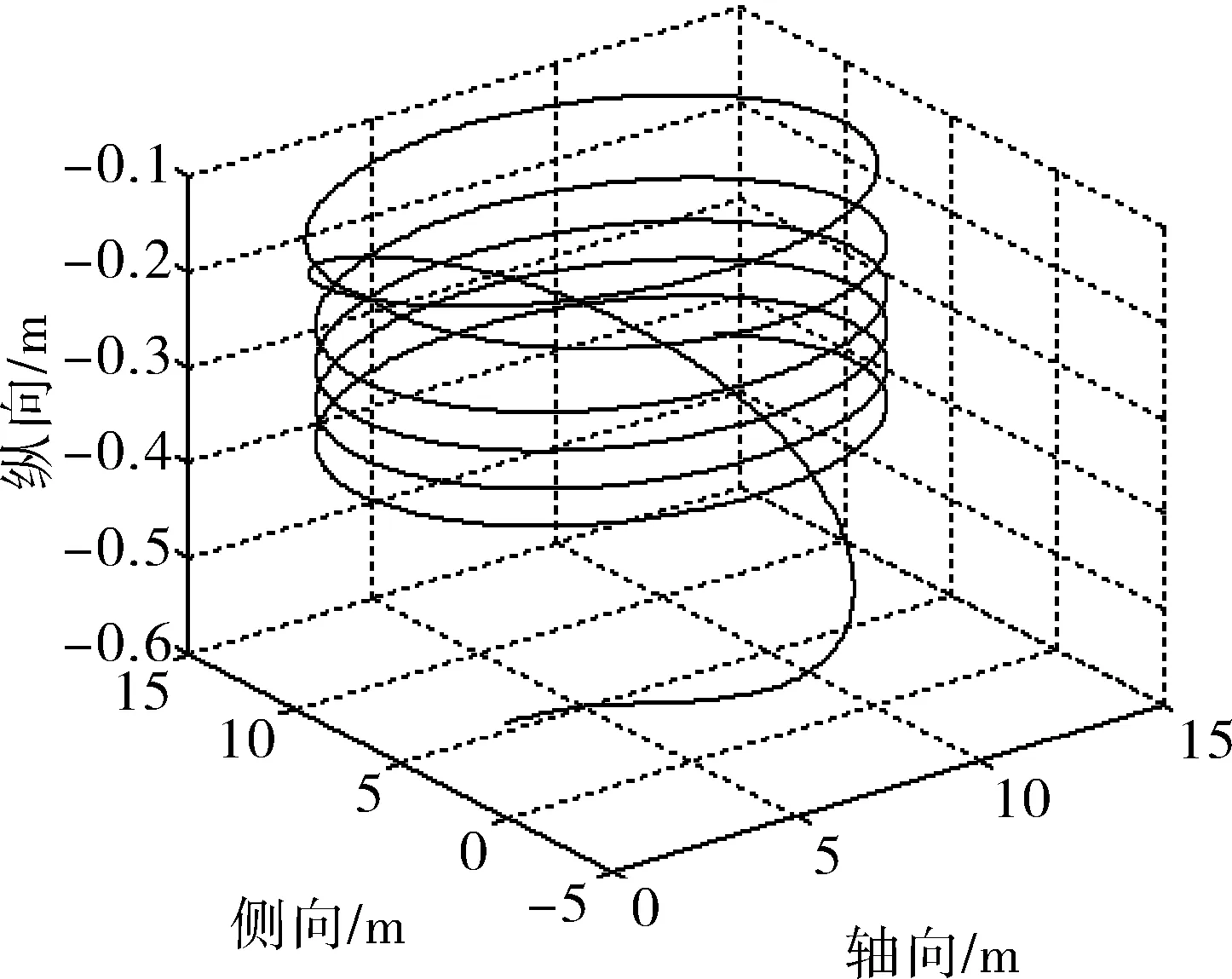
图6 水平回旋状态的空间运动曲线(5 N负浮力)
针对3 N正浮力、航速3 km、水平舵-1°、垂直舵25°的回旋状态进行了仿真。仿真时间200 s,水下航行器保持回旋下沉状态,仿真结果见图7。
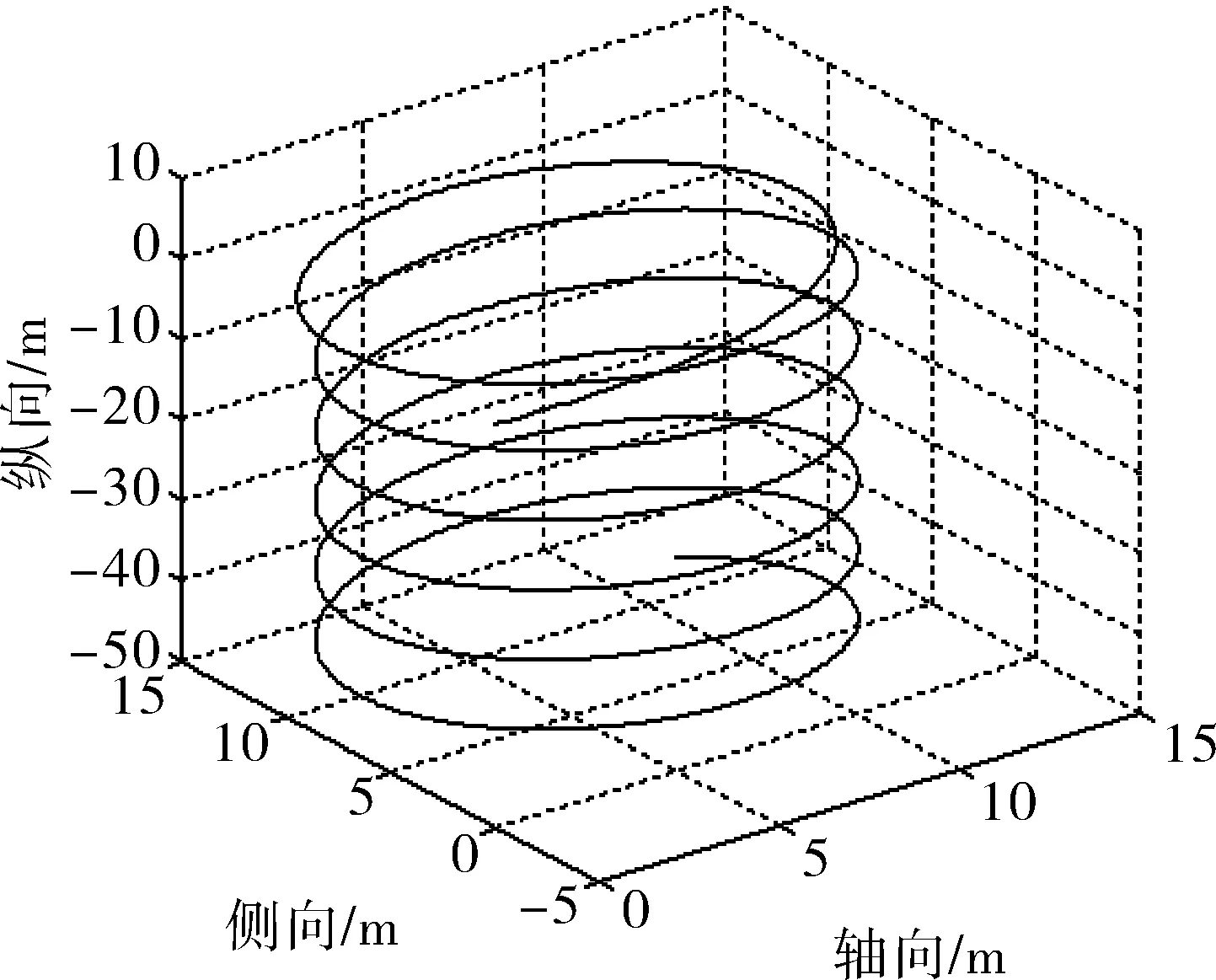
图7 回旋状态的空间运动曲线(3 N正浮力)
针对5 N负浮力、航速3 kn、水平舵-6°、垂直舵25°的回旋状态进行了仿真。仿真时间200 s,水下航行器保持回旋上浮状态,仿真结果见图8。
图8 回旋状态的空间运动曲线(水平舵-6°)
3.2 回旋状态仿真结果分析
根据以上仿真结果分析得:
a)航行器在200 s的时间内完成了6圈水平回旋,回转半径不大于7 m。回旋过程中航行器姿态稳定,俯仰角θ在±1°间变化、横滚角φ在-3°~3°间变化、偏航角持续线性增加。
b)浮力大小影响到航行器每回旋一周的深度变化。对于5 N的负浮力,每回旋一周航行器下降0.1 m的深度;对于3 N的正浮力,每回旋一周航行器下降8 m的深度,俯仰角保持-10°左右,横滚角在10°之内。可以通过垂推螺旋桨的控制来调节航行器每回旋一周的下降深度。
c)通过水平舵与垂直舵的联合操控可使水下航行器完成回旋上浮运动,当水平舵角为-6°时,水下航行器每回旋一周上浮4 m,俯仰角保持5°左右,横滚角在10°之内。
4 结束语
文中运用Matlab/Simulink模块对水下航行器的悬停与空间回旋状态进行了数值仿真,并对影响悬停和回旋特性的主要因素进行了分析,得到了水下航行器悬停和回旋运动的规律,可以直接在水下航行器的设计和操控中应用。
猜你喜欢
水上消防(2022年1期)2022-06-16
语数外学习·高中版中旬(2021年1期)2021-09-10
海洋开发与管理(2020年2期)2020-09-10
中学化学(2017年6期)2017-10-16
中学生数理化·高一版(2016年4期)2016-11-19
中学生数理化·七年级数学人教版(2016年4期)2016-11-19
广东造船(2016年3期)2016-07-13
试题与研究·中考物理(2015年4期)2016-04-07
少儿科学周刊·少年版(2015年2期)2015-07-07
少儿科学周刊·儿童版(2015年2期)2015-07-07
