
高空智能环卫巡查及预警系统设计与仿真
2019-11-12 12:01焦方源李薇
电脑知识与技术 2019年25期
关键词:仿真分析
焦方源 李薇


摘要:针对现代智慧城市中多功能园区环卫信息采集与状态预警智能化亟待提高的现实问题,本文以高空环卫信息智能采集与状态预警过程为研究对象,运用分类感应与综合决策的判定原理,提出了多功能园区环卫参数设置与状态信息计算及更新方法;设计了多功能园区环卫特征信息智能采集与状态预警方案;并以生产、办公、居住和商贸等功能相结合的多功能园区为分析模型,运用Matlab仿真平台对主要环卫特征信息参数及状态预警过程进行了仿真分析。结果表明,本系统能够准确捕捉多功能园区主要环卫特征信息,并通过适时计算、分析和判断发出环卫状态预警,实现了多功能园区环卫信息采集与状态预警过程的智能化。
关键词:多功能园区;环卫信息;智能采集;状态预警;仿真分析
中图分类号:TP277 文献标识码:A
文章编号:1009-3044(2019)25-0266-04
Abstract: Aiming at the practical problem that environmental sanitation information collection and state warning intellectualization should be improved urgently in multi-functional Park of modern intelligent city, this paper taked the process of intelligent environmental sanitation information collection and state warning carried by UAV as the research object, and put forward the environmental sanitation parameter design of intelligent park based on the principle of classification induction and comprehensive decision-making, designed the scheme of environmental sanitation characteristic information intelligent collection and early warning in intelligent park. taking the typical multi-functional park, which combines production, office, residential and commercial functions, as the model, this paper simulated and analyzed the typical state early warning process by using MATLAB simulation platform. The results show that the system can capture the typical environmental sanitation information of the multi-functional intelligent park accurately, and send out the state warning through timely calculation, analysis and judgment, so as to improve the intelligent level of environmental sanitation information collection and state warning process of the multi-functional intelligent park.
Key words: Multifunctional Park; Sanitation information; Intelligent collection; State Early-warning; Simulation analysis
随着人工智能技术为核心内容的智能信息化建设在世界各国不断深入推进,作为智慧城市核心内容的多功能园区建设与管理模式探索与研究成了新的时代课题和研究领域。耿丹、徐大成等人对多功能园区的结构及发展模式等问题进行了一定程度的研究,并强调了多功能园区在提升工作效率和经济效益中的重要作用[1-2];徐艳艳等人对多功能园区信息系统结构、任务和特点等领域进行了论述[3-5];陈珑凯、李敏等人对态势感知及其系统、园区环境、大气条件及其感知网络等领域进行了分析和论述[6-8],但是他们都未曾述及以无人机为载体和智能信息感知为基本特色的高空智能巡查及预警技术在多功能园区环卫状态预警中的应用,学术上仅有极少数人对以智能感应与人工智能技术相结合为特色的多功能园区环卫状态信息智能采集、计算、状态判定与预警相关领域进行深入研究。基于上述原因,本论文着重对以无人机搭载的多功能园区环卫信息智能采集、巡查与状态预警系统(下文简称高空智能环卫巡及预警查系统或本系统)在多功能园区环卫特征信息感知、计算、判定及状态预警等相关领域进行探索研究,并对其关键环卫状态指标及预警过程进行仿真分析,藉以提升多功能园区环卫状态信息处理及预警过程智能化水平。
1 多功能園区环卫特点与状态参数设置
现代多功能园区绝不是功能单一的特定区域,而是集办公、居住、商贸、绿化、风景和生产等功能于一体的多功能区域,其环卫特征信息与小型城镇完全相同。多功能园区环卫特征信息采集与状态预警的过程,就是对当前空域中的环卫指标参数传感测量、适时传输、优化处理并与相应的标准数据信息进行对比分析,及时发出相应状态预警信息的过程[9-11]。本文根据环卫特征信息采集、计算、判定及预警过程的需要,对多功能园区环卫特征信息参数作如下设置和定义,分别如表1和表2所示。
定义1:子域:为准确获取环卫特征信息,将被测空域合理划分而成的微小空间区域;而且整个被测空域可以看成按照感应测量的先后顺序,由许多子域构成的特殊序列。每个子域的环卫特征信息具有自己相对的稳定性和独立性。
2 智能巡查方案与环卫信息提取
2.1 智能巡查方案设计
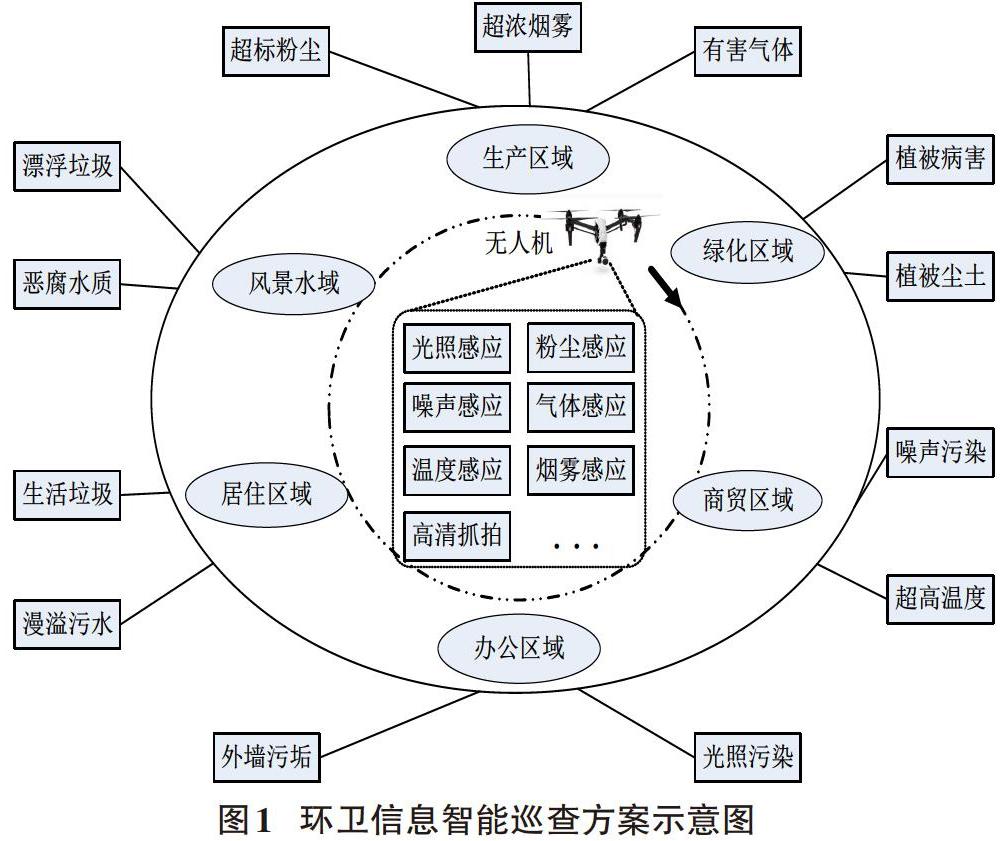
环卫信息智能巡查就是利用无人机搭载主要有害气体(如天然气、CO2、CO、SO2等)、温度、噪声、光照、粉尘、烟雾等多种类型感应设备,沿既定或随机决定的巡查路线对多功能园区中的各子域进行适时测量、分析、判定和预警的过程。环卫信息智能巡查方案示意图如图1所示。
2.2 环卫信息提取与适时更新
各种传感器的有效感应区域宽度和有效感应距离是不同的,现选取其最小值作为划分子域的尺度。假设当前被测空域可被分割为N个独立子域,每个子域随机测量Q次,则其中第i个子域,第k次测量获取的温度、光照强度、噪声功率、粉尘浓度、气体浓度及烟雾浓度等主要环卫特征信息可表示为:
3 环卫状态分类警示信息获取
随着季节的变化环卫状态也必然不断变化,被测空域参考标准状态信息也会呈现出一定规律的变化。为更尽可能准确地获取正常环卫状态下被测子域及邻域标准状态信息,现规定搭载传感系统的无人机以每小时30公里(每秒约8.3米)的速度匀速飞行,每秒钟对各种环卫信息采样一次,并将其中的连续M次采样的平均值作为当前被测子域的最佳标准信息。因此,对于第i子域,设过去第j次采样的温度、光照强度、噪声功率、粉尘浓度、气体浓度及烟雾浓度等主要环卫特征信息可表示为:
将第i子域的[T~cur(i)]、[L~cur(i)]、[N~cur(i)]、[D~cur(i)]、[G~cur(i)]和[F~cur(i)]与相应的标准参考信息[Tsta(i)]、[Lsta(i)]、[Nsta(i)]、[Dsta(i)]、[Gsta(i)]和[Fsta(i)]相比较,如果这些采样平均值超过相应的参考标准,智能环卫巡查系统将发出第i子域对应环卫状态的分类警示,并向本系统中“环卫状态综合预警”模块发出对应的类别的环卫警示信息[Tcau(i)]、[Lcau(i)]、[Ncau(i)]、[Dcau(i)]、[Gcau(i)]、和[Fcau(i)]。环卫状态分类警示流程如图2所示。
4 多功能园区环卫状态综合预警
环卫状态综合预警,就是以相应环卫指标平均信息作为参考,将环卫巡查系统得到的适时环卫特征信息与之比较,就当前空域的环卫状况进行评价,对超出参考标准的多项指标进行警示,并同时发出相应环卫状态的过程[12]。环卫状态综合预警具体实现方法是以表2的适时环卫特征信息为基本数据,运用式(2)~式(14)的计算和更新方法,对当前空域的环卫信息进行统计分析,再将其与本区域相应特征信息参考值相比较,评价当前空域的环卫状态是否安全,以发出相应的环卫状态预警信息,其详细流程如图3所示。
5 仿真实验设计与数据分析
5.1 仿真实验设计
环卫特征信息采集过程就是本系统对特定空域的连续传感测量过程,因此得到的一系列环卫特征参数采样值会随时间不断变化,具有较强随机性[13]。但是,其中某一次采样得到的当前子域环卫特性参数则处于相对稳定状态,可视为恒定值。于是,现假定当前被测空域被划分为若干个具有不同特征信息的子域,现对第i子域采样测量10次(其他子域方法相同,不再重复),得到各种环卫特性信息采样值如表3所示。将表3中数据经过式(2)~式(14)的计算得到该子域的环卫特征信息平均值,再以各环卫特征参数的子域平均值为仿真对象,通过编写仿真程序,在Matlab仿真平台上对环卫状态特征参数中的高温报警、光照报警、噪声报警、粉尘报警、气体报警和烟雾报警等特征信息参数进行仿真,得到仿真结果图4和图5所示。
5.2 仿真数据分析
随着智能环卫巡查及预警系统在多功能园区上空持续航行,必然会经历具有不同环卫参数信息的子域,必然会引起环卫巡查系统输出的环卫特征参数信息必定随之变化。为正确分析仿真结果,现将采用的环卫特征信息参考值如表4所示。
从图4和图5可以看出,当前子域除刺激性气体项目外,其余环卫参数都已超标,智能环卫巡查及预警系统已经发出了相应的分类警示信号;而且,当前子域中同时发生了高温报警、光照报警、粉尘达报警、噪声报警和烟雾报警,按图3所示综合预警原理智能环卫巡查及预警系统判定当前子域极大可能发生了火灾,于是立即向相应部门发出了火灾报警。整个过程中环卫巡查及预警系统输出的环卫特征信息随着子域的切换而改变,体现了本系统对环卫特征参数信息感知的适时性。依此原理,本系统通过对各种环卫参数信息传感测量、融合计算、适时数据分析与智能报警,能及时就火灾、声光污染、水域污染和泄漏污染等多种环卫状况进行预警,实现了环卫状态的智能巡查和预警。
6 结论
本论文分析并设置了能够精确表征多功能园区环卫特征的性能参数;针对高空智能环卫巡查系统在多功能智能园区环卫参数信息采集过程,提出了适时有效的参数更新计算方法;设计了多功能园区环卫智能巡查及预警流程,并通过精确的分析、计算和仿真,证实了本系统能有效提高多功能园区环卫特征信息智能采集与环卫状态预警过程智能化水平。本系统与地面智能环卫清理系统的有效结合,实现垃圾智能清理、转运、地面智能擦洗等环卫施工过程的全面智能控制是本系统的进一步完善和研究方向。
参考文献:
[1] 耿丹.基于城市信息模型CIM的多功能园区综合管理平台研究与设计[D].北京:北京建筑大学,2014.
[2] 徐大成.基于物联网和云计算的多功能园区信息系统的研究与实现[D].西安:西安电子科技大学,2015..
[3] 徐艳艳.物联网时代智慧化园区建设方案的研究[D].西安:长安大学,2014.
[4] 李耀东, 顾文浩.多功能园区建设探索与研究 [J].电信技术,2018(12):40-43.
[5] 郑赟, 谢述旭.基于物联网的多功能园区建设探索[J].信息与电脑(理论版),2018(20):33-36.
[6] 陈珑凯. 基于物联网的化工园区事故态势感知研究[D].广州:华南理工大学,2015.
[7] 周雷雷, 江伟, 王猛,杜诗研.多功能园区规划方案探讨[J]. 物联网学报,2017,12(1):72-76.
[8 ] 李敏.基于物联网的监控系统研究与应用[D]. 湖北荆州:长江大学,2015.
[9] 何共建,熊兵,吴开云,贺佐强.面向智慧城市的智能垃圾桶监管系统[J].计算机时代,2018(6):76-80.
[10] 蘇文.我国城市智慧环卫的发展现状及构建对策[J].环境与发展,2018(9):224-226.
[11] 焦方源,焦小洋,李薇.农林区域特征信息智能采集与生态预警系统设计与实现[J].西华师范大学学报(自然科学版),2018,39(2):217-222.
[12] 焦方源,李佳,李薇.流域型灾害特征信息提取及动态预警系统[J].计算机应用,2015,35(1):294-298.
[13] 焦方源,焦小洋,李佳.高层建筑物智能清洗流程设计与过程控制[J].福建电脑,2018(6):21-24.
【通联编辑:梁书】
猜你喜欢
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
