基于Arduino单片机的太阳能目标追踪系统设计
2019-11-12 05:46陈沛宇欧阳华兵何克劲钱立松孟润心
上海电机学院学报 2019年5期
陈沛宇, 欧阳华兵, 何克劲, 胡 三, 钱立松, 孟润心
(上海电机学院 机械学院, 上海 201306)
太阳能作为一种新型清洁能源,取之不尽,用之不竭。太阳能光伏发电也将成为未来新能源开发与利用的重要方式之一[1]。由于太阳光强会随着日照时间发生变化,但在实际应用中太阳能电池板常常采用固定式安装,其角度无法跟随太阳光强进行调节,大大降低了太阳能的利用效率。而采用太阳能跟踪技术,可有效提升电池板的发电效率,研究表明:在相同的太阳能发电系统中,自动跟踪太阳能系统比传统固定式系统的发电效率可以提高将近30%[2]。因此,如何提高太阳能的利用效率,设计出一种自动且高效的追踪太阳能系统是目前太阳能光伏发电系统中亟待解决的难题之一[3]。
目前,针对太阳能追踪技术,国内外学者做了大量的研究,主要有视日运动轨迹追踪法和光电传感器追踪法[2,4]。视日运动轨迹追踪法根据太阳的实际运动轨迹按照预定程序调整追踪装置,按其所追踪太阳方位角和高度角不同,可划分为单轴追踪和双轴追踪两种方式,前者指追踪太阳方位角,而双轴追踪同时追踪方位角和高度角[3],该方法能能够根据太阳实际运行情况实时追踪,但在追踪过程中容易产生累积误差且不能自动消除,具有精度不高的特点。光电传感器追踪法则直接利用光电传感器检测太阳光强度,通过控制系统,驱动执行机构使得追踪装置重新对准太阳光,此方法具有灵敏度高、控制器简单等特点,其不足在于受天气影响较大,但在阴雨天气无法实现太阳光的追踪[2,4]。
为此,本文在已有太阳能目标追踪系统理论基础上,针对如何提高太阳能追光效率的问题,采用光电传感器与双轴追踪相结合方式,构建四点追光模块,通过映射法提取光线强度数据,基于Arduino Mega单片机设计了一款太阳能双轴自动追踪系统。通过试验验证了该系统的正确性和有效性,能够有效提高太阳能的利用效率。
1 系统总体方案设计
1.1 太阳能追光系统结构
太阳能双轴自动追踪系统主要有单片机、传感器、步进电动机等组成[5],其系统结构框图如图1所示。为了保证传感器检测信号的有效性,采用基于笛卡尔坐标系模式将4个光敏电阻传感器分布在4个象限内,当太阳光线照射到传感器上时,传感器把信号送到前置放大器,经由电压转换后输入单片机,单片机按照一定的算法,经处理计算后将信号传递给电动机,实现太阳能追踪装置的水平方向和竖直方向调整,最终达到电池板对太阳目标的实时追踪。

图1 太阳能追光系统总体结构
1.2 双轴追光装置设计
为充分提高追光效率,追光装置采用双轴追踪设计方式,其机械结构主要包括竖直轴转向机构和水平轴转向机构两大部分,其中竖直轴转向机构通过行星齿轮减速电动机驱动由一对角接触球轴承支撑的竖直轴转台进行转动,如图2(a)所示。水平轴转向机构安装在竖直轴转向机构的转台之上,它采用曲柄摇杆机构,工作过程中蜗轮蜗杆减速电动机驱动曲柄作周转运动,再由连杆将曲柄与作为摇杆的太阳能电池框架相连,如图2(b)所示,其优点在于摇杆的摆动角度可控制在一定范围内以避免太阳能电池框架因系统失误导致过度旋转而损毁。
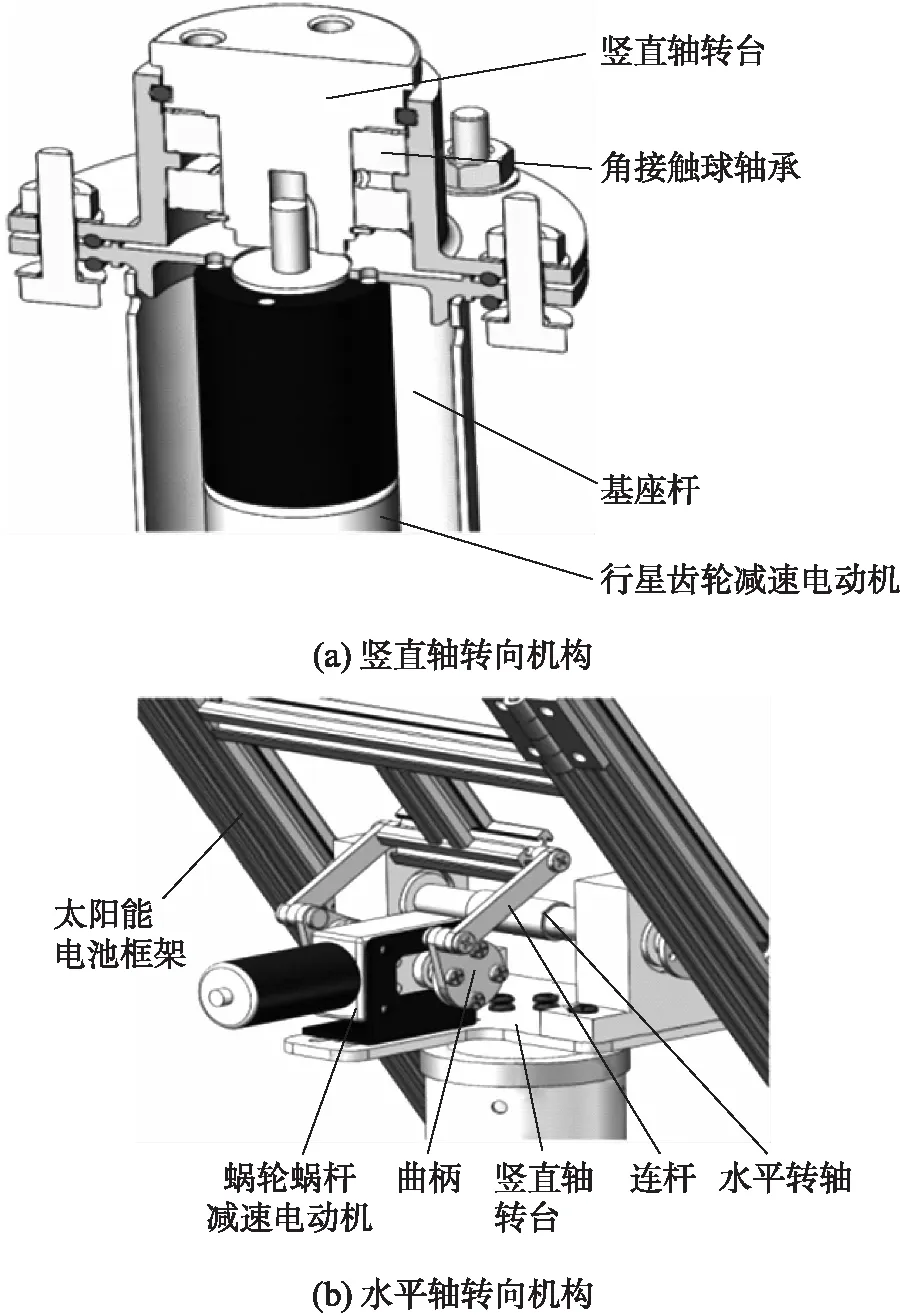
图2 太阳能双轴追光装置
连杆尺寸设计采用了CAD技术,根据曲柄摇杆机构极限位置公式,结合Solidworks软件尺寸驱动原理[6-7],将曲柄旋转中心、摇杆旋转中心及其另一端活动铰链的相对位置按实际装配尺寸画出并加以尺寸和位置约束,再将表示太阳能电池框架的摇杆分别旋转至理想的最大、最小角度位置后分别测量摇杆活动铰链到曲柄旋转中心距离,经曲柄摇杆机构极限位置计算公式计算后即可获得出曲柄长度和连杆长度。最终搭建的太阳能目标追踪系统实物如图3所示。

图3 太阳能目标追踪系统实物图
1.3 追光模块方案的改进
为了有效提高太阳能追踪系统的能源利用率,设计合理的追光模式是其关键环节之一。目前常用的追光方法主要有四点追光法和五点追光法[8-9]。五点追光法将位于原点处与其他位于4个象限的光敏电阻传感器检测数据分别计算得出太阳光方位,实现追光。而四点追光法则去掉原点处光敏电阻传感器,直接将4个象限的检测数据比较计算,最终达到追光目的,其算法相对较为简单,且容易在此基础上进行改进。
实验前期分别采用上述2种方案对追光装置进行实验,使用五点追光法后发现追光效果不明显,其原因在于4个象限光敏电阻曝光率始终低于原点处光敏电阻曝光率,降低了追光敏感度。采用四点追光法则出现当光源位于追光模块坐标轴线附近时,很难比较出最强光线位于轴线那一侧,导致追光装置的左右摇摆。
为解决上述问题,在四点追光法的基础上对其改进,增加了当相邻两象限内光敏电阻电路数据相似时的转动判定算法。
1.4 追光控制系统方案设计
为了实现对追光系统的有效控制,提高控制系统的灵活性,本项目提出了采用Arduino单片机对追光系统进行控制,其总体实现方案如图4所示。
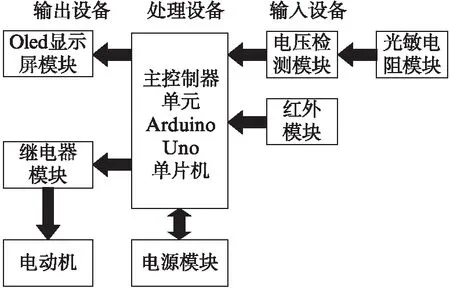
图4 Arduino单片机总体控制方案
整个控制系统主要包括Arduino单片机、光敏电阻模块、电压检测模块、红外模块、电源模块、继电器模块、OLED显示屏模块、电动机模块等部分。系统总体控制思路:通过光敏电阻模块对太阳光强进行检测,由电压检测模块处理后,输入Arduino单片机控制单元处理,处理后再经由继电器模块,实现弱电到强电转换,驱动电动机模块,实现追光系统的追光装置的运动,达到太阳光强最强的目标追踪功能。
2 系统的总体实现
2.1 追光模块的原理及其算法设计
为了验证这种方法追光的可行性与准确性,在原先实验用的四点追光法基础上做了改进,最终设计的太阳能追光模块结构如图5(a)所示(1为安装孔,2为光敏电阻,3为隔板,4为基座);其实物如图5(b)所示。

图5 太阳能追光模块
追光模块中各光敏电阻电路测量光线强度的方法是间接测量电压值[10],以电路中常值电阻两端电压值间接表示光线强弱,光线强度采集电路如图6所示,采用了映射法,即将光敏电阻与一个常值电阻串联接入电压为U0的电源,用电压传感器测量常值电阻两端电压,电压传感器反馈出的信号并非常值电阻两端电压值UR,而是与电压值UR成正比的模拟量a。该方法的好处在于无需测出具体电压值,只需直接采用模拟量a代替当前太阳光强值。

图6 光线强度采集电路
为解决1.3中两种追光方法在实验时存在的问题,本文提出只采用4个光敏电阻构成追光模块,通过对比两组光敏电阻电路检测数据方法来实现太阳能的追光功能。其工作原理为:以不透光十字隔板组成的轴线为平面坐标系,以将追光模块划分为4个象限,当太阳光沿追光模块前某个方向照射时,太阳光线最强处于该平面坐标系的某个现象内或轴线上,则相应象限内光敏电阻传感器可被太阳光照射,其余象限内的光敏电阻则因太阳光被隔板遮挡不能被照射到。据此,通过获取4个象限光敏电阻间的检测值,再对其分析处理就能确定追踪装置的转动方向。
以水平轴追光为例,遵循如下逻辑:当第Ⅰ、Ⅱ象限的测量值之和大于第Ⅲ、Ⅳ象限测量值之和时,说明太阳光线最强处于第Ⅰ、Ⅱ象限内,应控制水平轴电动机将追光装置向上翻转直到接近太阳直射角为止;反之,则控制水平轴电动机向上翻转。竖直轴电动机的驱动也采用同样控制方案,即第Ⅰ、Ⅳ象限测量值之和大于第Ⅱ、Ⅲ象限测量值之和时,竖直轴电动机向左翻转;反之,则向右翻转。由于光敏电阻传感器的阻值有5%以内的误差[13],且在安装时会有位置误差,为了保证算法的正确有效性,在算法中引入敏感系数k,k值越大则追光敏感度越高,其详细水平轴追踪算法流程如图7所示。
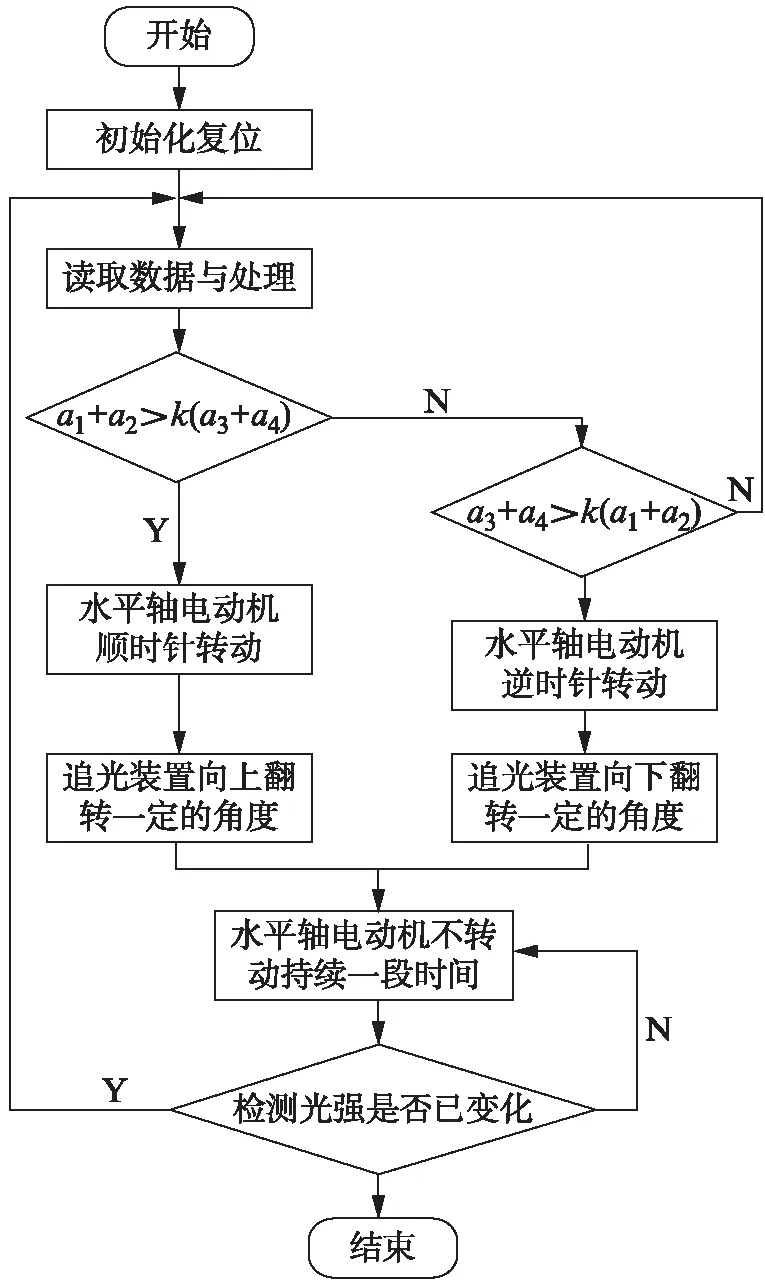
图7 水平轴追踪算法流程
2.2 追光电动机控制系统设计
为了实现追光模块的有效控制,本项目采用ArduinoMega单片机作为控制模块,该单片机的最大优点是灵活、接口多、成本低、性价比高等[11]。“H桥”电路是常用控制直流电动机正反转的方法,通过控制4个三极管改变电流方向达到控制电动机正反转的目的[12-13],采用3个继电器替代4个三极管对1个电动机的正反转进行控制,两组这样的电路即可实现追光系统的双轴驱动,其详细接线如图8所示。继电器选用SRD-DC12V-SL-C型继电器。

图8 直流电动机正反转接线图
单片机通过弱电信号控制继电器的开闭,实现控制电动机的转动[14],因为继电器选用的型号为低电平触发,通过3个继电器实现对一个电动机的左右转动及停止。由图8电动机接线可以得出电动机停转的条件是1号继电器信号为0,电动机正转对应的3个继电器信号分别为1、1、0,而点电动机反转对应的3个继电器信号分别为1、0、1。根据电路图可以分析得出在1号继电器信号为1接通时2、3号继电器必须互锁[15],即不能同时通电或断电,否则会对短路,为了避免这一现象的产生,需要在电动机正反转切换之间多增设一个步骤,该步骤为1号继电器信号为0,处于失电状态。
2.3 显示模块
采用显示模块主要目的是显示与维护。本项目采用了OLED显示屏模块,该模块采用I2C通信协议,要将SDA双向数据线、SCL时钟信号线与单片机对应的接口连接即可实现通信,具体连接方式如图9所示。

图9 OLED显示屏模块与单片机连接
通过电压传感器将电信号转换为模拟量,通过单片机采集所得的模拟量,反馈到显示模块中。不需要将得到的模拟量转换为电压显示输出,只需作为一个值以方便检测。当电路出现问题,或者系统非正常工作时,可以通过查看显示模块,检查出现问题所在的电路,易于故障排除,节省检查电路时间[13]。在系统调试时,可检测当时环境光具体数值,以便数据采集,确定适合的敏感系数K值。
3 实验验证
装配好的太阳能目标追踪装置如图10所示。

图10 太阳能目标追踪装置
实验硬件控制系统装置如图11所示。为了保证系统工作的可靠性,将所装配好的太阳能追踪装置分别在环境光源较弱的室内和环境光源较强天气晴朗的室外等两个环境中进行实验。

图11 追踪装置的硬件控制系统
在室内,通过采用灯光模拟光源,追踪装置追光十分敏感,能够迅速对最强光源的位置作出判断。当灯光位于装置前方不同位置时,太阳能电板所在平面和灯光的入射光源近似天气晴朗的室外装置保持垂直状态,当灯光移动时,太阳能电板也跟随光源转动,直到近似保持垂直状态为止。
在环境光源较强天气晴朗的室外进行实验时,发现光线越强追踪系统运动越不敏感,其主要原因是光敏电阻与光照强度间呈反比例关系,为此在光敏电阻上覆盖一层均匀的有色玻璃,降低了直射入光敏电阻的太阳光强,达到了与光强较弱的室内同样的目的,大大提高了系统的灵活性。
实验时先测得太阳光位于追光装置的Ⅰ、Ⅱ象限内,此时OLED显示屏如下图12所示,其中数字1、2、3、4分别对应第Ⅰ、Ⅱ、Ⅲ、Ⅳ象限内黄敏电阻电路的a值,数字5所表示的是位于追光装置原点处供参考的光敏电阻电路a值,本实验中不起作用。

图12 室外追光实验检测图
由上图可知:Ⅰ、Ⅱ、Ⅲ、Ⅳ象限内光敏电阻电路的a值分别是433、463、27、105,根据2.1所述算法,敏感系数选取k=0.8,可计算得出:
(a1+a2)=433+463=896>
0.8×(a3+a4)=0.8×(27+105)=105.6
按照理论分析,太阳位置应该位于Y轴正半轴附近,追光装置应该只向上翻转。实验过程发现:将电动机驱动模块开启,待程序初始后水平轴电动机启动,装置向上翻转一定角度后直至正对太阳角度后停止,追光完成。上述实验进一步验证理论与实验运动结果的一致性。
由于在不同应用领域中对追光系统的转动精度要求不同,如普通追光太阳能发电装置为了降低能耗和机械损耗对转动精度要求较低,而一些需准确跟踪光源的应用领域对转动精度要求较高,故敏感系数k的取值也应有所不同。
为了保证太阳能支架只有当光强出现一定程度的变化时才转动,而不是一直运动,节省电动机运动时能源,提高系统效率,为追光装置确定合适的K值非常必要。以追光太阳能电池支架在晴朗白天发电工作环境为标准,追光装置法平面与太阳方位角分别成10°、20°、30°左右,分别取敏感度系数K为0.1~1.0进行实验,获得灵敏度k与追光精度关系表,如表1所示,据此可知:当转动精度为20°时,推荐k值为0.8。

表1 灵敏度k与追光精度关系
4 结 语
本文提出一种基于Arduino单片机的太阳能目标追踪系统,该系统将光电传感器和双轴追踪相融合,主要对太阳能目标追踪系统进行合理结构设计,研究了光电追踪模块的控制方法,能稳定可靠地实现太阳能目标的快速追踪,价格相对便宜,性价比较高。实验结果表明:该系统光线较弱时,系统灵敏性非常高;而在太阳光强度较大的环境中,灵敏性有所降低,但通过配合均匀有色玻璃减光或采用灵敏度范围更大的传感器能够大大提高系统的响应时间,有效增强自动追踪系统的准确性和可靠性,进而提高系统的太阳能利用效率,在一定程度上可推动太阳能的发展和普及。
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中学生数理化·高一版(2022年3期)2022-04-05
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
初中生学习指导·提升版(2020年10期)2020-09-10
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
山西青年(2017年8期)2017-01-31
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10