
云南及周边地区GNSS数据处理方法优化
2019-11-12 02:10徐良叶邵德盛吴学群王伶俐王岩张秋林
全球定位系统 2019年5期
徐良叶,邵德盛,吴学群,王伶俐,王岩,张秋林
(1.云南省地震局,云南 昆明650041;2.昆明理工大学,云南 昆明650093)
0 引 言
空间大地测量学的发展,为精确地研究地壳运动规律,开辟了重要的新途径.GPS观测可提供高精度、大范围和准实时的地壳运动定量数据,使得在短时间内获取大范围地壳运动速度场成为可能,GPS 技术已成为监测现今地壳运动一种强有力的工具[1].
目前云南省地震局形变测量中心对全球卫星导航系统(GNSS)连续观测资料进行深入分析,获得了各个不同区域的应变场变化时间序列,并进一步提取出了适合于云南地区的应变综合短临预测指标,利用该指标在预测预报工作中进行了一定的尝试,为云南省地震局的地震预测工作起到了积极的作用[2].在地震研究中,GNSS原始数据的解算十分重要,因为数据解算的精细程度决定有效信息能否得到识别.而参考框架是GNSS数据处理的基础,国际地球自转服务(IERS)发布的国际地球参考框架(ITRF)序列是国际上公认的精度最高,稳定性最好的参考框架[3].自1988年起,IERS已经发布了ITRF88、ITRF89、ITRF90、ITRF91、ITRF92、ITRF93、ITRF94、ITRF96、ITRF97、ITRF2000、ITRF2005、ITRF2008和ITRF2014共13个版本的地球参考框架[4].2014年年底,IERS将新版本更名为ITRF2014,相比以前的版本,ITRF2014更加稳定、精确.在数据的数量与质量、参数模型的建立、测站的分布合理上均有较大程度的提高,并且首次考虑了大气造成的非潮汐负载效应,同时提出了震后形变模型,采用了非线性模型来维持框架点坐标[5-6].
然而每次ITRF框架更新,GNSS数据解算的框架也要更新,GNSS数据成果都要转到统一的参考框架下.早期有占伟等[7]研究了ITRF2000与ITRF2005的差异对 GNSS数据处理的影响,得出经坐标转换后,两个框架下的测站坐标差异和基线差异在毫米级,水平速度场的差异随研究范围的缩小而减小.杨文峰等[8]通过对不同的ITRF参考框架下的同一站点数据进行解算,验证了GAMIT/GLOBK软件对GNSS数据的基线的解算结果精度与ITRF参考框架无关, 而与各种改正模型和数据预处理有关.
由于IGS站点数据多,解算工作量大,为了统一参考框架目前我们对GNSS数据的点位移解算都是依赖于SOPC网站提供的二进制H文件.2017年该网站有将近三个月不更新数据,我们的点位移解算也跟着停滞了,这非常影响我们工作的时效性.本文主要利用云南及周边地区的GNSS观测资料,通过自主解算全球IGS站点数据来统一参考框架,进行坐标精度分析,并与ITRF2014下的测站坐标、基线长度、速度场作比较分析.所以此项研究有利于提高我们解算数据的独立性,即减少对SOPAC网站的依赖,统一参考框架,为云南地区的短临预报提供实时、可靠的数据依据.
1 数据处理
1.1 基线解算
本文采用GAMIT/GLOBK10.6软件对基线进行处理,选取HYDE、BJFS、IRKT、PIMO、GUAO、IISC、USUD、TSKB、WUHN、TWTF、LHAZ、URUM 等十几个中国及周边的 IGS 跟踪站与2015年-2016年云南及周边地区数据质量较好的35个基准站的GNSS观测资料(站点如图1所示,蓝色小三角表示基准站)联合进行数据预处理.IGS 核心站强约束(水平方向 0.005~0.020 m、垂直方向 0.020~0.050 m),主要的模型选择和参数设置如表1所示[2-3,9]:

图1 云南及周边基准站分布图
表1 基线解算参数设置

参数设置 数据采样间隔/s30卫星截止高度角/(°)10° 观测模式LC-AUTULN 天顶延迟改正模型VMF1 固体潮模型IERS03 海潮模型FES2004 天顶延迟参数个数(个/2小时)1
1.2 框架解算及平差
为得到高精度的数据处理结果,首先按照连续性、稳定性、高精度、多中解、平衡性和精度一致性等原则优化选取框架点[10-11],本文筛选2015年-2016年347个稳定性较好的全球IGS测站数据(如图2所示,黄色五角星表示IGS站点),采用麻省理工学院开发的GAMIT/GLOBK10.6软件与SOPAC网站提供的全球IGS测站约束文件sittbl.(选取了全球稳定性较好分布均匀的IGS站作强约束),运用间距分区法[12]将347个IGS测站分为7个子网进行了分区解算,其中IGS 核心站强约束(水平方向0.02~0.05 m,垂直方向0.05~0.1 m),全球IGS站基线解算策略参数与1.1基线解算的参数设置是一致的,得到higs1a,…,higs7a(单日松弛解).

图2 全球IGS站点分布
选取ITRF2014框架为平差基准,利用GLOBK软件将GAMIT处理得到的云南及周边测站单日松弛解和上述解算的全球IGS 站的单日松弛解合并.考虑到点位坐标的精度,在点位移的求取过程中对每 4 天的数据进行综合平差,得到一个点位静态解.综合2年来各期基准站的坐标得到自主解算框架下的测站坐标时间序列和速度场.同样选取ITRF2014框架为平差基准,利用GLOBK软件将从SOPAC网站上下载全球的H文件与云南及周边测站单日松弛解进行合并,得到ITRF2014框架下测站点位坐标与速度场.
2 坐标精度分析
GPS常用的评价坐标精度的指标有坐标均方根误差和坐标重复性精度,其中坐标重复性精度的计算公式如下[13]:

(1)

(2)
在自主解算的框架下,用GLOBK综合求解2015年-2016年云南及周边地区35个基准站的坐标,测站坐标均方根误差如图3所示,坐标均方根误差水平方向在0.7 mm以内,垂直方向在0.3 mm以内;按式(1)、(2)计算得到的坐标重复性精度如图4所示,水平方向的坐标重复性精度在5 mm以内,满足精度要求,而垂直方向坐标的重复性精度大多数在2.5 cm以内,精度较差.其中,测站季节性非构造变动对垂直分量的测定有直接的影响.从坐标均方根误差和坐标重复性精度统计图来看:在自主解算框架下测站坐标的解算精度是可靠的,可以满足地震监测的实际需要.
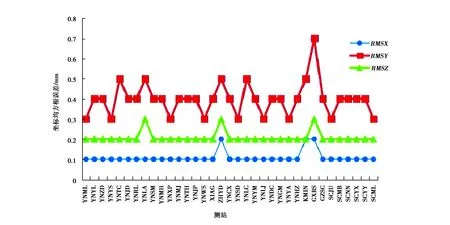
图3 测站坐标均方根误差
由于在自定义框架和ITRF2014框架下GLOBK平差是所选的平差基准一致(ITRF2014框架),分析两个框架下的坐标差异,无需做基准转换.在分析测站运动中经常用站心坐标系统(NEU),将解算得到的2015年-2016年云南及周边地区35个基准站在两个框架下的空间直角坐标(XYZ)根据文献[14-15]方法转化到站心坐标系,坐标时间序列对应值做差比较,分别记为ΔN,ΔE,ΔU,统计分布情况如图5所示,ΔN绝大多数在-8.5~2 mm,ΔE绝大多数在-8~8 mm,ΔU绝大多数在-3~3 cm,两套坐标存在明显的系统误差,而导致这种误差的原因有:
1)ITRF2014的输入数据为4种空间大地测量技术(VLBI、SLR、GNSS和DORIS)提供的 SINEX 格式的站坐标,而本文自主解算框架的输入数据只有GNSS.
2)ITRF2014由975个站址向其提供数据,本文自主解算框架由稳定性较好的347个全球分布均匀的IGS站点组成,即框架点个数和框架点分布不同.
3)加入全球IGS站点平差时,这些全球IGS站点的解算策略,组网方法不同.所以两套坐标存在系统误差也是合理的.
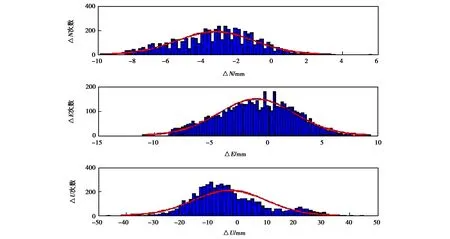
图5 坐标差直方图
3 基线长度分析
根据解算得到的两套坐标分别计算基线长度,相同的基线做差比较,以6条基线长度差为例分析,如表2所示,自定义框架和ITRF2014下基线长度差随基线长度的增大而增大,但总体而言差异很小(最大值在1~4.8 mm,标准差在2 mm以内).

表2 自定义框架和ITRF2014下基线长度差
4 水平场速度分析
使用GLOBK软件中的glred模块,得到各测站的时间序列,检查测站是否存在粗差、跳跃或精度较差的点.这些现象可能是由于地震、仪器更换、多路径效应、迁站、个别天观测数据质量差等原因导致,应予以剔除[16].根据解算得到的自定义框架(Cust-om framework)和ITRF2014下的坐标,应用最小二乘法线性拟合2015年-2016年云南及周边地区35个测站的水平速度场,如图6所示,红色表示在ITRF2014下的水平速度场,蓝色表示自定义框架的水平速度场.按式(3)计算各测站水平运动速度标量值V和方位角α.
(3)
将两个框架下测站的V值和α值对应值做差比较,分别记为ΔV和Δα,如表3所示.

表3 自定义框架和ITRF2014下站点速度差
从图6和表3可以看出在两个框架下的水平速度场差异很小,速度值差异在1 mm/a以内,方位角差异在0.02°以内,说明参考框架对水平速度场的影响较小,本文的方法也能较好地反应云南地区不同地块之间的相互运动.

图6 自定义框架和ITRF2014下云南水平速度场差异
5 结 论
1)在自定义框架下解算的测站坐标均方根误差水平方向在0.7 mm以内,垂直方向在0.3 mm以内,水平方向的坐标重复性精度在5 mm以内,满足精度要求,而垂直方向坐标的重复性精度大多数在2.5 cm以内,说明本文解算测站坐标的方法是可靠的;自定义框架和ITRF2014下的测站坐标存在系统误差,水平方向上的差异在8.5 mm以内,垂直方向上的差异在3 cm以内,由于两个框架的输入数据和框架点分布不同,在求解全球IGS站点坐标时的解算方法和组网方式也不同,测站坐标存在系统误差是可以接受的;
2)自定义框架和ITRF2014下基线长度的差异在2 mm以内,说明参考框架对基线长度的影响较小,也说明本文自主解算的参考框架满足精度要求;
3)自定义框架和ITRF2014下云南及周边地区水平速度场速度值差异在1 mm/a以内,方位角差异在0.02°以内,表明参考基准对于云南及周边地区水平速度场的影响较小,也能用本文解算方法来测量云南地区不同地块之间的相互运动,为云南地区短临预报提供实时可靠的数据;
在自主解算框架与ITRF2014框架下云南及周边地区测站坐标、基线长度、水平速度场存在毫米级的差异,说明本文自主解算的框架精度是可靠的,此外自主解算参考框架耗时较长、工作量较大,以后我们将从如何提高解算速度方面进行研究.
猜你喜欢
导航定位学报(2022年4期)2022-08-16
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2021年5期)2021-10-13
数字海洋与水下攻防(2020年5期)2021-01-04
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
党的生活·党员电教与远程教育(2019年9期)2019-12-02
舰船电子对抗(2019年6期)2019-04-27
党的生活·党员电教与远程教育(2017年9期)2017-10-17
故事会(2016年21期)2016-11-10
