
基于LADRC的RBCC 高超声速飞行器轨迹跟踪
2019-11-12 09:06刘竹生雷建长李争学
导弹与航天运载技术 2019年5期
郑 雄,刘竹生,杨 勇,雷建长,李争学
(1. 中国运载火箭技术研究院研究发展中心,北京,100076;2. 中国运载火箭技术研究院,北京,100076)
0 引 言
火箭基组合循环(Rocket Based Combined Cycle,RBCC)高超声速飞行器飞行空域、速域跨度大,气动、推进性能与飞行状态相互耦合,为保证飞行器使用效能,必须实现高精度的轨迹跟踪。RBCC高超声速飞行器轨迹跟踪制导有以下难点:a)由于采用组合循环动力、机体/发动机一体化设计等先进技术,使得气动/推进/控制之间存在显著的动态交叉耦合效应,这些复杂的力学过程不可能完全精细地考虑在飞行器数学模型中,此外,在设计时采用的参数不可避免地与实际飞行有所偏差,这些都使得RBCC高超声速飞行器动力学模型具有显著的不确定性;b)RBCC高超声速飞行器在飞行过程中,空域、速域跨度大,面临的飞行环境复杂多变,往往会受到各种事先无法完全预知的外部扰动;c)RBCC发动机推力大小可调,为精确跟踪标称轨迹,除常规攻角外,RBCC发动机推力表征量——发动机节流阀开度也将作为闭环调节量,且与攻角调节存在耦合。以上这些情况都为RBCC高超声速飞行器的精确轨迹跟踪带来了挑战,其制导律需要在系统内、外不确定性强及制导控制量多且相互耦合的情况下仍能有良好的轨迹跟踪效果。
目前,国内外学者对RBCC高超声速飞行器的轨迹跟踪制导律研究较少。贾晓娟等[1]针对吸气式组合动力飞行器的爬升轨迹,采用高度、高度微分的偏差来形成纵向制导的攻角指令,而对组合动力发动机的推力指令作开环处理,这将导致不能充分发挥组合动力飞行器的制导调节能力。虽然RBCC高超声速飞行器作为一种新型飞行器,有其独特性,但仍可以借鉴其他类型飞行器轨迹跟踪制导的相关研究成果。沈作军等[2]将轨迹线性化控制(Trajectory Linearization Control,TLC)在升力体飞行器设计中的应用从姿态回路扩展到制导回路,提出了一种基于TLC理论的再入轨迹跟踪制导律,并通过三自由度蒙特卡洛拉偏仿真验证了方法的有效性。宋晨等[3]以高超声速滑翔飞行器为研究对象,提出一种基于路径跟踪和自适应动态面控制的三维轨迹跟踪制导方法,仿真结果表明,该制导方法具有较高的跟踪精度并且具有较强的克服模型不确定性的能力。上述成果表明,研究具备强鲁棒、高精度的轨迹跟踪控制方法是提高轨迹跟踪性能的有效途径。
自抗扰控制(Active Disturbance Rejection Control,ADRC)[4]是一种具有较强鲁棒性的新型实用控制方法,其核心是通过将系统内、外不确定性视为总扰动,并构造扩张状态观测器(Extended State Observer,ESO)对总扰动进行实时估计与补偿,从而获得较强的控制不确定性的能力以及较高的控制精度。在此基础上,Gao[5,6]发展了基于线性扩张状态观测器(Linear Extended State Observer,LESO)的线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC),与 ADRC相比,LADRC待调参数大大减少,从而更易整定和应用于实际,且研究[7]表明,对于具有不确定性的复杂非线性系统,LADRC仍具有很强的控制能力。
鉴于此,为解决RBCC高超声速飞行器在不确定性强及制导控制量多且相互耦合情况下精确跟踪标称轨迹的难题,本文应用LADRC,设计了一种强鲁棒、高精度的纵向轨迹跟踪制导律。与传统比例反馈制导进行了仿真对比分析,结果表明本文设计的制导律鲁棒性更强。
1 飞行器数学模型的建立
将RBCC高超声速飞行器看作铅垂平面内运动的可控质点,视地球为圆球,并忽略自转,则飞行器的纵向运动方程组为


由以上结果可知,RBCC高超声速飞行器的纵向运动数学模型是典型的多入多出耦合系统,表现出强烈的非线性、时变性和不确定性。这些特点增加了RBCC高超声速飞行器在复杂环境下精确跟踪标称轨迹的难度,对轨迹跟踪制导律的鲁棒性和精确性提出了更高要求。
2 基于LADRC的制导律设计
2.1 LADRC基本原理
与 ADRC相比,LADRC省去了跟踪微分器(Tracking Differentiator, TD),并利用LESO估计系统的总扰动,同时采用线性状态误差反馈(Linear State Error Feedback,LSEF)控制动态补偿线性化后的系统。
设有如下单入单出二阶非线性不确定系统:

针对形如式(3)的系统,设计线性自抗扰控制器,如图1所示。

图1 LADRC结构Fig.1 Structure Block of LADRC

对于式(4)系统,设计LESO如下:

令:


针对式(7)系统,设计LSEF控制律:

文献[7]、文献[9]将式(5)LESO的收敛性和整个闭环系统式(4)、式(6)、式(8)的收敛性结合起来分析,所得结论为:在 LADRC式(5)、式(6)、式(8)的作用下,式(4)系统闭环稳定;调节反馈增益可以控制跟踪误差的范围;调节LESO带宽可以影响系统对参考输入的跟踪精度。
2.2 轨迹跟踪制导律设计
RBCC高超声速飞行器的轨迹跟踪制导模型属于双入双出系统,具备非线性、时变、不确定及强耦合的特性。在将单入单出LADRC引入RBCC高超声速飞行器制导回路时,需首先探讨如何用自抗扰控制思想解决式(2)多变量系统的解耦控制问题。
分析式(2)系统,其非线性、时变、不确定及耦合部分可表示为


从而,可将式(9)改写为


综上,基于LADRC的RBCC高超声速飞行器轨迹跟踪制导框图如图2所示。
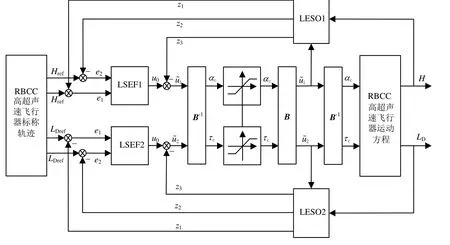
图2 基于LADRC的轨迹跟踪制导框图Fig.2 Structure Block of Trajectory Tracking Guidance Based on LADRC
在图2的基础上,为实现基于LADRC的RBCC高超声速飞行器轨迹跟踪制导,还需处理 Peaking现象。
1978年,中国人均国民总收入只有200美元。无数家庭,最大的烦恼,是能不能解决温饱;整个国家,最大的忧虑,是会不会被“开除球籍”。
为消除Peaking现象,文献[10]采用了在控制初始阶段将控制量置0的方法,但该方法并不适用于RBCC高超声速飞行器的轨迹跟踪制导。原因有两点:一是飞行器发射后,为避免点火后发生熄火,RBCC发动机节流阀开度的取值不能为0;二是初始阶段,RBCC高超声速飞行器需要的制导指令不为0,强制性的将控制量置 0,不利于减小实际飞行轨迹与标称轨迹的偏差。为此,结合比例反馈制导,提出如式(13)、(14)所示的能消除LADRC轨迹跟踪制导Peaking现象的制导切换策略。


表1为拉偏设置。在表1所示的拉偏情况下,进行LADRC制导和防Peaking LADRC制导的对比仿真,所得制导指令如图3所示。

表1 拉偏设置Tab.1 Setting of Bias

图3 LADRC制导和防Peaking LADRC制导指令曲线Fig.3 Commands of LADRC Guidance and Anti Peaking LADRC Guidance
由图3可知,将LADRC应用于RBCC高超声速飞行器的轨迹跟踪制导时,Peaking现象非常明显,初始段制导指令的剧烈变化将导致姿控回路无法跟踪,不具有现实可行性。当采用本节所提的制导切换策略后,制导指令变化平缓,Peaking现象得以消除,验证了所提制导切换策略的有效性。特别指出,在后文中,LADRC制导即指防Peaking LADRC制导。
3 仿真分析
以下面如图4所示的空射型RBCC高超声速飞行器爬升-巡航轨迹为参考,进行LADRC轨迹跟踪制导效果的检验和分析。

图4 RBCC高超声速飞行器爬升-巡航轨迹Fig.4 Climb-cruise Trajectory of RBCC-Powered Hypersonic Vehicle
仿真中,制导周期为0.01 s,积分步长为0.005 s。对于比例反馈制导,=0.00085,=0.0085,=0.00085,=0.0085。对于LADRC制导,在高度通道中,选取=30,=1.44,=14.4,在射程通道中,同样选取=30,=1.44,=14.4。制导切换策略式(13)、式(14)中的设计参数=4 s,=50 s。
为充分验证 LADRC轨迹跟踪制导的精度和鲁棒性,本文将从动态参数扰动和风干扰两方面进行比例反馈制导和LADRC制导的仿真对比分析。
3.1 考虑动态参数扰动的制导性能分析
动态参数扰动设置如表2所示,制导仿真结果如图5所示。

表2 动态参数扰动设置Tab.2 Setting of Dynamic Parameters Disturbance

图5 动态参数扰动制导仿真结果Fig.5 Guidance Results of Dynamic Parameters Disturbance
3.2 考虑风干扰的制导性能分析
风干扰设置如表3所示,制导仿真结果如图6所示。

表3 风干扰设置Tab.3 Setting of Wind Disturbance
由图6可知,在顺风干扰和逆风干扰下,LADRC制导都具有更小的超调量和稳态误差,表明 LADRC制导抗风干扰的能力更强,鲁棒性更优。另外还可看出,相比于逆风,顺风对RBCC高超声速飞行器的轨迹跟踪效果影响更大。

图6 风干扰制导仿真结果Fig.6 Guidance Results of Wind Disturbance
4 结 论
本文从便于工程应用角度出发,为解决RBCC高超声速飞行器在不确定性强、制导控制量多且相互耦合情况下精确跟踪标称轨迹的难题,提出 LADRC制导方法并进行仿真验证。所得结论如下:
a)结合比例反馈制导和LADRC制导的防Peaking制导切换策略,能很好地消除 LADRC应用于RBCC高超声速飞行器轨迹跟踪制导时出现的Peaking现象;
b)相比于传统比例反馈制导,本文提出的LADRC制导在动态参数扰动和风干扰下轨迹跟踪精度更高,鲁棒性更强。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
科技研究·理论版(2021年22期)2021-04-18
中国新技术新产品(2020年19期)2020-12-25
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
太空探索(2016年7期)2016-07-10
