一种安防雷达性能评估的新方法
2019-11-11 02:12:26胡晨光
雷达科学与技术 2019年5期
熊 毅, 高 森, 陈 勇, 胡晨光
(1.中国电子科技集团公司第三十八研究所, 安徽合肥 230088;2.汽车智能网联与主动安全技术国家地方联合工程研究中心, 安徽合肥 230088)
0 引言
随着国民经济的高速发展,我国无人机市场进入井喷式发展,消费级、专业级无人机市场异常火爆。结合重量、尺寸、速度等因素,无人机可被分为微型、轻型、小型、中型、大型五大类,各类无人机在环境监测、电力巡检、航拍摄影、农业植保等领域都有广泛的应用。然而,在享受无人机产品高科技成果的同时,无人机在“黑飞”、失控坠机、民航起降干扰等各类事故频发,严重影响了公共安全和社会秩序。为实现对无人机的依法管理,国务院、中央军委空中交通管制委员会办公室针对目前市场上的各类无人机均出台了相关管制条例[1]。根据相关条例,本文所构建的无人机GPS系统中的无人机采用大疆公司生产的某轻型无人机,飞行区域在传统禁飞区外,以符合相关管理条例和保证飞行试验安全。
安防雷达作为一种检测无人机等低空飞行器的重要手段,可以不受天气条件制约,全天候地对管制区域进行监视,在各类安防系统中有着广泛的应用。随着技术的发展,各种低成本、指标各异的小型安防雷达被开发出来,并逐步推向市场。作为用户方与厂家来说,如何快速搭建一套安防雷达性能评估系统,评估各类安防雷达对无人机探测的性能,是一项有待急需解决的事情。
1 雷达性能评估系统
本文通过微型无人机、便携式高精度GPS、地面服务器、雷达终端、评估系统终端及评估软件搭建了一套雷达性能评估系统。该系统利用微型无人机搭载便携式高精度GPS作为安防雷达的探测目标,便携式高精度GPS内部插有SIM卡,通过设置设备配置文件,能够实时采集无人机飞行航线上的位置信息[2],并将无人机位置信息通过移动通信网络定向实时发送至地面服务器设备,采用服务器通过无线网络实时接收无人机GPS位置数据并转发给评估系统终端,评估系统终端通过无线热点等方式接收无人机位置数据,并将无人机大地坐标数据转换成与雷达对应的站心极坐标数据,再与接收到的雷达数据一起投影到评估系统终端界面进行显示,对接收到的GPS和雷达数据进行数据累积与在线统计分析,最终得到安防雷达的精度、发现概率及雷达威力等指标数据。
该评估系统充分利用4G移动通信技术大传输频宽、高存储容量、强兼容性等特点,将便携式高精度GPS、地面服务器、评估系统终端等多个设备接入无线通信网络,通过地面服务器实时接收无人机GPS数据并实时推送至评估系统终端,再由评估系统对雷达各性能指标进行计算。与传统方法相比较,该方法能够在线计算雷达各性能指标,避免了大量试验数据的事后分析,具有设计新颖、人员投入少、组织效率高、运行成本低等优点,极大地方便了用户、厂家对评估工作的组织与有效开展,为安防雷达与安防系统的评估试验提供了一种有效途径和方法。评估试验中的雷达性能评估系统组成如图1所示。

图1 雷达性能评估系统组成示意图
2 坐标变换技术
GPS是一种全天候的全球导航定位系统,能为用户提供连续、实时的三维位置信息,其在测量、导航、测速等方面已经得到了广泛的应用,随着对GPS认识的不断加深,其应用的领域也在不断扩大。本文评估系统接收到的无人机GPS数据为三维位置信息,采用大地坐标系,即经度、纬度、高度。本地雷达对目标飞机的监视采用的是以雷达站心为中心的极坐标系,因此,存在大地坐标系与极坐标系之间的坐标变换问题。
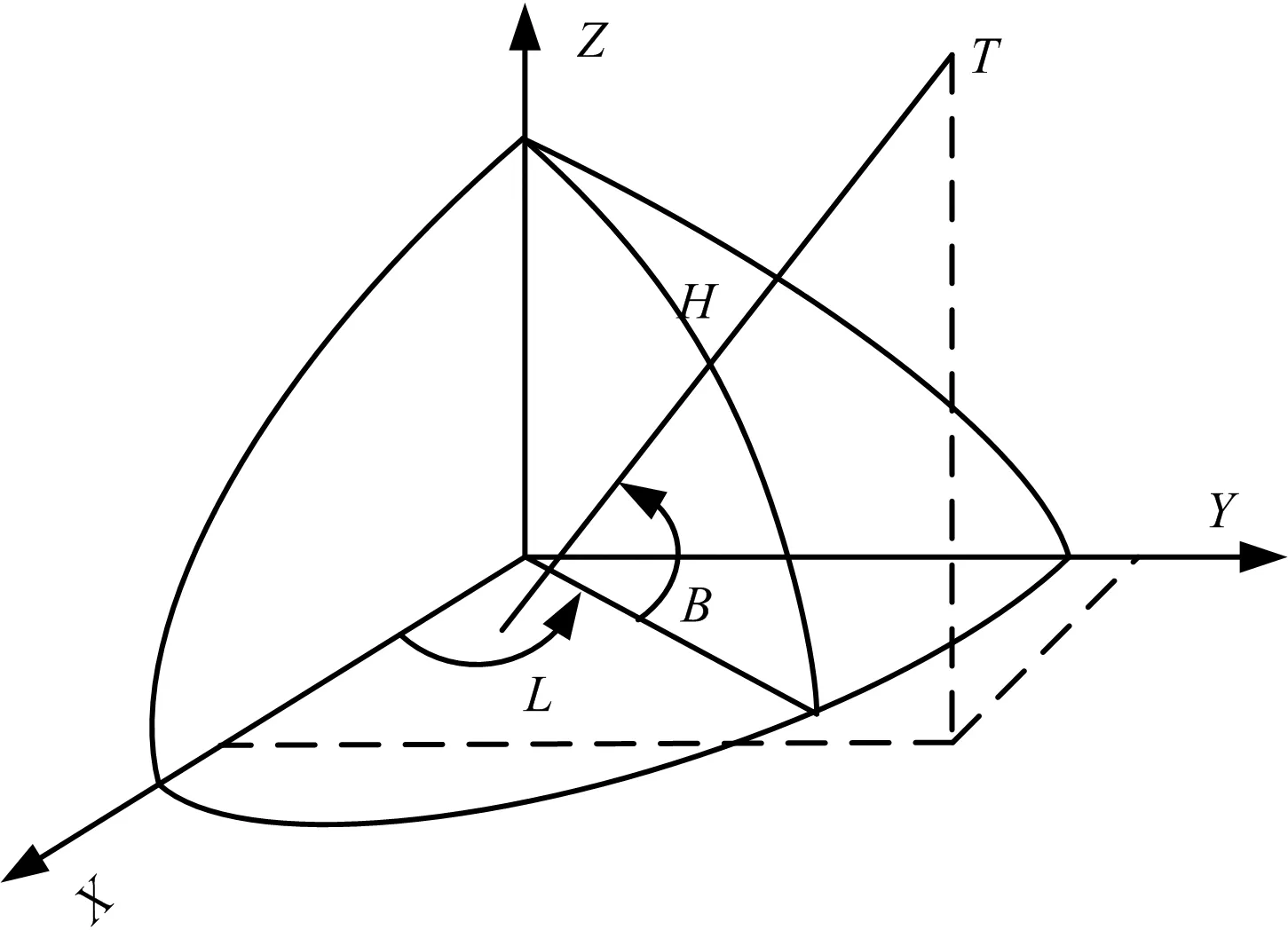
图2 大地坐标系与地心空间直角坐标系
坐标变换技术的核心是将GPS提供的大地坐标转换成目标相对于被测雷达的站心极坐标,要求雷达终端GPS接收机与便携式高精度GPS选用同一组GPS星座以保证定位的精度。在实际应用中,只要无人机GPS系统离被测雷达终端GPS接收机的距离不超过300 km[3],都能满足在同一组星座下工作的要求。图2是大地坐标系与地心空间直角坐标系的示意图。下面给出大地坐标转换成站心极坐标的数学模型及具体步骤。
1) 把安装在无人机上的GPS记录下的目标大地坐标(L,B,H)转换成其对应的地心空间直角坐标(X,Y,Z),转换关系如下:
X=(N+H)·cosB·cosL
Y=(N+H)·cosB·sinL
Z=[N(1-e2)+H]·sinB
(1)

2) 把目标地心空间直角坐标(X,Y,Z)与雷达站地心空间直角坐标(X0,Y0,Z0)的向量差通过坐标变换转换成站心空间直角坐标系下的向量,即目标在站心空间直角坐标系下的坐标。
3) (Xh,Yh,Zh)T=A(X-X0,Y-Y0,Z-Z0)T
(2)

在实际应用中,由于被评估雷达探测到的观测数据是以极坐标形式出现的,故而常把站心空间直角坐标转换成站心极坐标[4],Rh,Ah,Hh分别表示距离、方位和高度,转换关系如下:
Ah=arctan(Xh/Yh)
(3)
Hh=Zh
3 系统评估方法
3.1 精度计算
在精度计算时,需要将要比较的数据对齐到同一时刻。假设共有R个目标,共生成m个航迹,对于第i条航迹的第j点,对应时刻为t,对应真值s离t时刻最近两点的时间为t1和t2,有t1≤t2,它们的综合对应关系如表1所示。

表1 航迹与真值信息表
按照t与t1/t2的对应关系,分情况讨论:
1)t=t1=t2
此时,航迹点的时间恰与真值点的时间重合,有
(4)
2)t1 此时,航迹点的时间落入两个真值点的中间。由于真值记录时间的间隔较短,可通过线性插值的方法,获得t时刻的真值点: (5) 这里R,A,H分别表示雷达探测到目标的距离、方位与高度数据,当真值被计算出来后,再根据GJB 74—1998要求进行系统误差与均方差计算,从而评估出被测雷达的精度指标。 被测安防雷达威力与发现概率评估主要是通过累积存储便携式高精度GPS数据和雷达录取目标数据,经过数据相关匹配,找到与之对应的GPS目标数据,在一段时间内比较、统计雷达探测无人机目标的最远距离,将雷达探测最远距离作为雷达威力指标,统计雷达探测中的单个目标发现概率以及雷达总体发现概率[5]。安防雷达威力与发现概率统计计算工作流程如图3所示,关于雷达威力与发现概率详细计算方法可以参见GJB 74—1998相关要求,这里不再详细叙述。 图3 威力与发现概率计算处理流程图 图4是本文设计的基于无人机GPS系统对某安防雷达产品单架次目标探测的航迹比较结果,评估系统实时采集雷达终端航迹数据和无人机GPS位置数据,并进行目标匹配处理,当样本数满足精度计算要求时,可通过人工输入指令计算雷达精度,系统收到该指令后综合利用终端航迹数据以及坐标变换后的无人机GPS数据,自动统计出本批目标的精度分析结果,其中间隙比较大的航迹点为安防雷达航迹数据,间隙比较小的航迹点为无人机GPS数据。图5是该型安防雷达距离精度分析结果,方位和高度精度分析结果这里不再一一显示。通过试验统计分析,雷达探测最远距离为6.73 km,发现概率为89.1%。这里需要注意的是,在单个批次雷达精度计算过程中,对于大于3倍标准差的数据需要进行野值剔除,不参与雷达精度计算。 图4 无人机GPS数据与安防雷达航迹比较结果 图5 某安防雷达距离精度分析结果 本文利用已经市场化的无人机产品与便携式高精度GPS产品,设计了一种基于无人机GPS系统的雷达性能评估新方法,并给出了比较详细的数学模型和具体的实施步骤。该评估系统提供的解决方案直接把安防领域用户关心的无人机作为靶标,利用多种无线方式进行数据传输与通信,通过实时接收GPS与雷达数据在线统计计算雷达性能指标,具有组织工作简单、指标实时计算、显示直观、经费投入少等优点,不仅能够对当前市场上种类繁多的安防雷达与安防系统进行快速评估,帮助用户有效筛选出合格的安防产品以及后期产品性能检验,而且还能够用于其他情报雷达、军用雷达等领域,协助雷达厂家自测产品相关性能指标,及时调整设备技术状态,为今后安防系统及其他相关雷达产品的评定工作开展和雷达处理算法评价提供了可行的途径与方法。3.2 威力与发现概率计算

4 试验结果


5 结束语
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:10
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:04
中学生数理化·七年级数学人教版(2021年4期)2021-07-22 03:15:58
青年歌声(2019年12期)2019-12-17 06:32:32
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
火控雷达技术(2016年3期)2016-02-06 02:30:26