一种多目标雷达探测系统的设计与实现
2019-11-11 02:12:1013
雷达科学与技术 2019年5期
13
(1.广西无线宽带通信与信号处理重点实验室, 广西桂林 541004; 2.桂林电子科技大学计算机与信息安全学院,广西桂林 541004; 3.桂林电子科技大学信息与通信学院, 广西桂林 541004)
0 引言
近年来智能驾驶已经成为各个汽车行业互相竞争的领域,而毫米波雷达作为其中一种具有全天候工作性能的传感器[1-2],无疑成为当前研发的热门主题,毫米波雷达能够在不良天气环境下实现目标探测[3-4],并能够根据发射波波形体制设计对应的信息提取算法,完成距离速度的计算。LFMCW体制的毫米波雷达具有结构简单、质量轻、体积小的优点[5-7],因此在毫米波雷达探测系统中应用十分广泛。但在多目标复杂背景环境下,容易出现多目标配对问题[8],从而导致虚假目标的存在。针对这一问题,文献[9]提出了动目标检测(MTD)频域配对法,文献[10]提出了变周期容差配对法。但MTD频域配对需要对回波数据进行多周期积累,然后通过计算MTD后目标上下扫频的峰值幅度、能量等特征对多目标进行配对,该方法导致计算量增加且容易出现相似目标配对失效问题。变周期容差配对法需要发射至少两组斜率不同的发射波,并对斜率不同的几种发射波回波进行同样的算法处理,然后再对两种波形提取的目标信息进行容差处理实现目标匹配,该方法导致后续信号处理过于复杂。
本文针对多目标配对问题,基于单发双收射频前端采用角度容差和峰值能量相近原则对多目标进行配对,该方法通过FPGA进行算法实现,主要原理为:在确定双天线回波中目标频谱峰值坐标的前提下通过坐标旋转算法对目标信号频域复矢量求相位差,基于该相位差计算出目标上扫频角度和下扫频角度,根据同一目标具有相同的上扫频角度和下扫频角度这一原则进行容差配对,并在角度容差的基础上进一步根据目标上下扫频峰值能量是否相近确认目标是否匹配,该步骤主要用于区分同角度不同距离和速度的目标,最后对配对后的目标峰值坐标进行距离、速度计算,从而最终得出目标的3种信息。测试结果表明该方法能够有效解决多目标配对问题并能够实现较高精度的距离、速度和角度的测量。
1 系统测量原理
1.1 系统测距测速原理
图1为LFMCW发射波和接收波示意图,其中B为射频带宽,T为发射波调制周期,τ为接收信号和发射信号之间的时延,fb+为接收信号和发射信号的上扫频差拍频率,fb-为接收信号和发射信号的下扫频差拍频率。
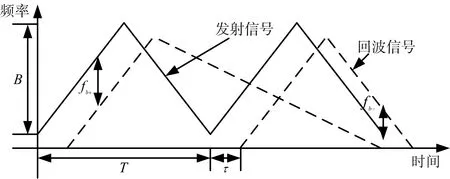
图1 发射波和接收波示意图
对接收信号和发射信号进行下变频处理后可以得到包含目标距离速度信息的差频回波信号,回波信号模型如下所示:
Su=Aexp(j2π(fb+t+μbt2)
(1)
Sd=Aexp(j2π(fb-t-0.5μbt2))
(2)
式中,μb为差频信号调制斜率,fb+和fb-为包含目标距离和速度信息的上下扫频差拍频率,且和距离速度满足下述关系:
fb+=4BR/CT+2V/λ
(3)
fb-=-4BR/CT+2V/λ
(4)
式中,R为目标距离,V为目标速度。因此结合式(3)和式(4)可得目标距离和速度计算公式:
(5)
(6)
由上述推导可知,只要求出差拍信号频率中的fb+和fb-便可间接求出目标距离和速度信息。
1.2 系统测角原理
本系统角度测量是基于单发双收射频前端进行实现的,实现原理如图2所示。
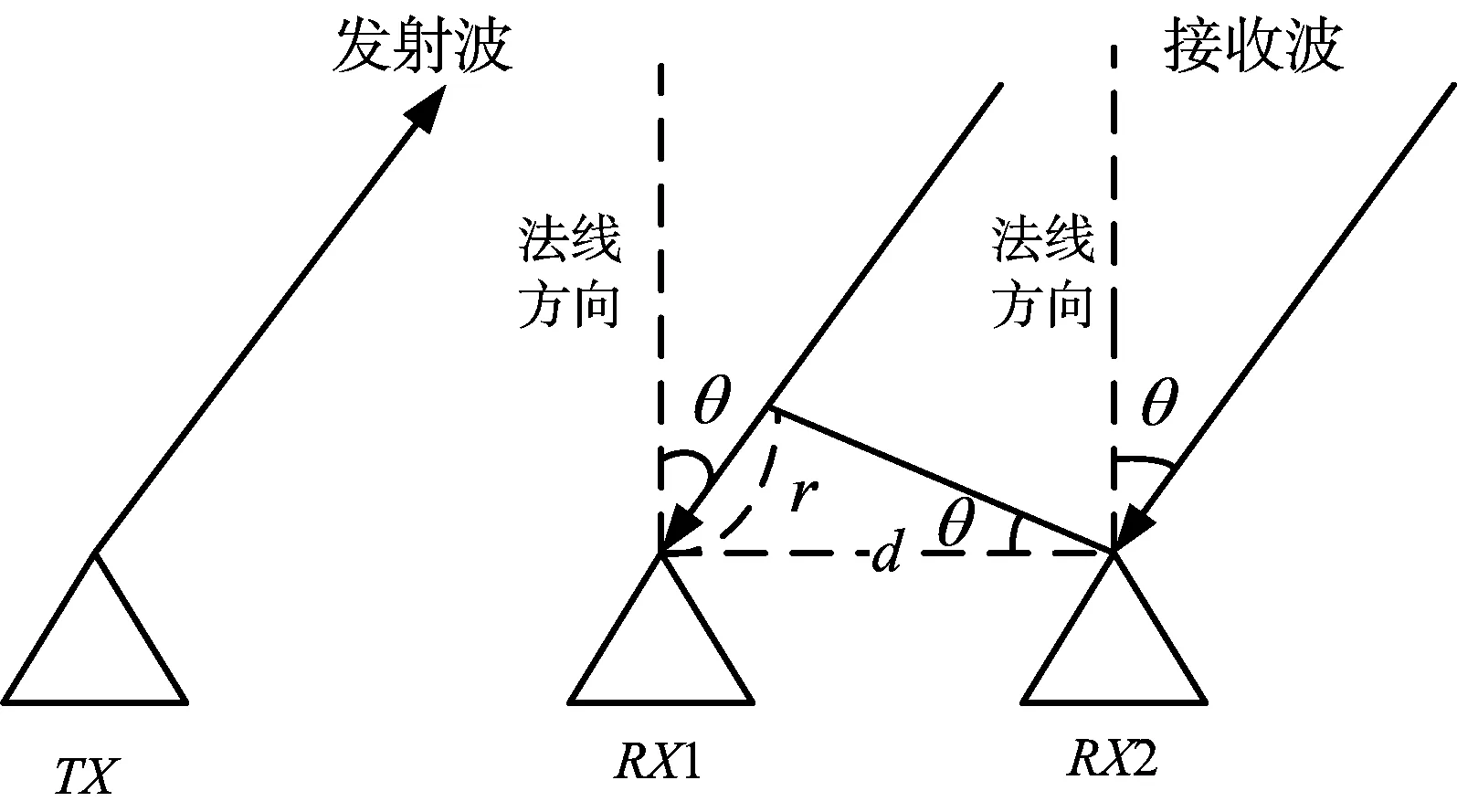
图2 相位干涉法测角
图2中TX为发射天线,RX1和RX2为两个接收天线,由于接收天线之间间距d较小,而目标距离射频前端较远,因此目标接收波信号在两个接收天线上近似平行,此时波程差r和目标方位角θ、接收天线间距d满足
r=dsinθ
(7)
波程差对应到差频回波信号中的相位差Δφ可表示为
(8)
因此方位角θ可表示为
(9)
一维FFT变换后通过虚警算法和谱峰搜索找到目标对应峰值的下标,然后根据下标取出双接收天线在频域对应的目标复矢量,求出双天线相位差Δφ,代入式(9)便可求得目标方位角θ。
1.3 多目标角度配对法
通过上述测量原理可以获取目标的距离、速度和角度信息,在单目标环境下,只需求出一组目标上下差拍频率即可,但在多目标复杂背景环境下,回波信号经算法处理后存在多组上下扫频差拍频率,假设雷达探测到n个目标,则存在n2种上下扫频组合,为了滤除n2-n种虚假目标,此时需要对不同目标的信息进行匹配处理才能得到目标正确的信息,因此本文针对多目标匹配困难问题,采用如图3所示的多目标角度配对算法对多目标信息进行匹配,实现原理为对双接收天线RX1和RX2的回波数据分别进行FFT处理,通过虚警和谱峰搜索算法提取目标峰值在频谱中的上扫频坐标和下扫频坐标,然后根据双天线上下扫频坐标取出各自对应的频域目标复矢量,通过1.2节中的测角方法求出目标上扫频角度θu和下扫频角度θd,同一目标在上下扫频中求得的角度理论上应该相等,但实际探测时存在一定误差,因此需要对上下扫频进行角度容差处理,由于实际探测中会存在同角度目标,角度容差处理后需要对满足角度误差的上下扫频峰值能量进行容差判断,判断方式为当峰值能量相近时判为同一目标。由于双接收天线接收的目标距离速度信息是相同的,因此多目标配对时只需对一个接收天线的目标进行配对即可,多目标配对后便可进行距离、速度的计算,此时可以得到目标的距离、速度和角度信息。

图3 多目标角度配对算法流程图
2 系统硬件结构设计
LFMCW雷达多目标探测系统硬件构成主要由电源模块、射频模块、信号处理、目标信息显示四部分组成,其结构框图如图4所示。电源模块主要用于信号处理和射频模块供电。射频模块由PLL电路,VCO压控振荡器,发射天线TX1和接收阵列天线RX1,RX2,以及正交混频器组成,主要用于实现信号调制、发射以及回波信号的接收和解调。信号处理部分包括AD采样、FPGA数据处理、USB数据发送、目标信息显示等,主要用于对模拟回波信号进行数字化采样、数字信号存储、传输及信号处理。最后将检测到的目标信息通过USB发送到上位机进行目标信息显示。

图4 多目标探测系统硬件结构图
本系统射频前端加入PLL电路提高系统射频频率稳定度以及调制信号的线性度,LFMCW发射信号的产生主要通过FPGA 的SPI串行口进行编程控制,正交混频器输出的四路IQ信号分别对应两路接收天线的实部和虚部,即I1,Q1对应RX1,I2,Q2对应RX2,正交混频后便于回波信号相位的求取。
3 FPGA数据处理算法设计
射频前端接收的回波数据经混频处理后输出I1,Q1,I2,Q2四路正交模拟信号到AD采样模块,经AD采样后输出到FPGA芯片进行信号处理,信号处理流程如图5所示。
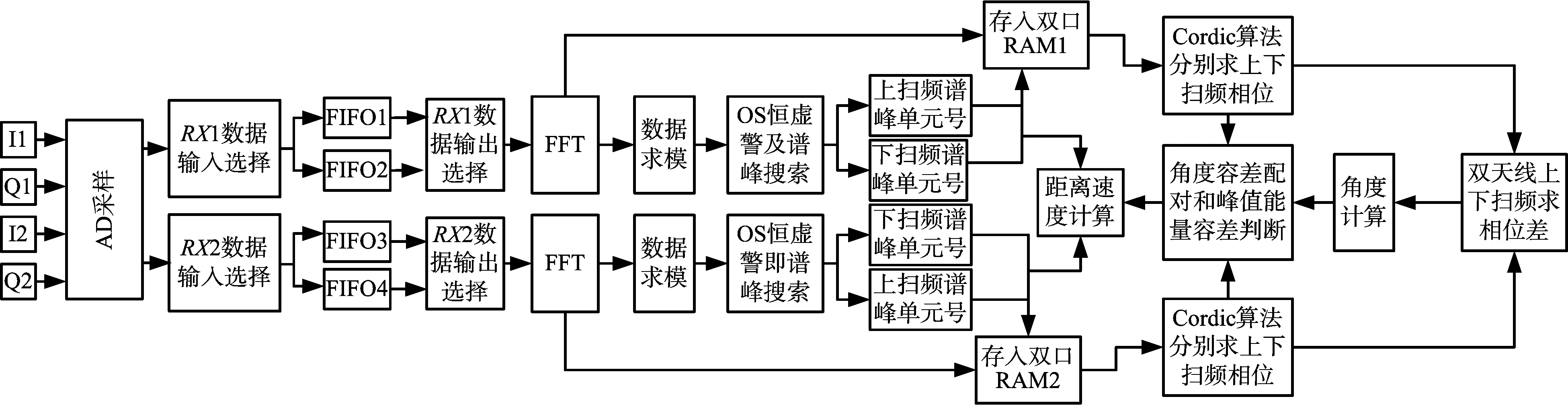
图5 FPGA信号处理流程
流程图详解如下:
1) 数据乒乓缓存。以RX1天线为例,在第一个缓存周期,通过RX1数据输入选择将第一周期回波数据缓存至FIFO1,在第二个缓存周期,通过RX1数据输入选择进行切换,将第二周期回波数据缓存至FIFO2,同时需要将第一周期缓存至FIFO1中的数据通过RX1数据输出选择模块输入到FFT处理模块进行处理,在第三个缓存周期通过数据输入选择再次切换将第三周期回波数据缓存至FIFO1,同时将第二周期缓存至FIFO2中的数据通过数据输出选择进行切换输入到FFT模块进行处理,如此循环下去。由于FPGA实现并行操作,因此RX2天线回波数据按同样方法缓存至FIFO3和FIFO4。
2) 回波数据FFT变换和虚警处理。以RX1为例进行说明,数据从FIFO1或FIFO2中输出到FFT模块进行时频域转换后,分两路处理,一路存入随机读写存储器RAM1,另一路进行数据求模,对数据求模后的频域数据进行恒虚警处理和谱峰搜索,从而在保证较高的目标检测概率的情况下寻找目标峰值所在的频率单元。本系统恒虚警采用OS恒虚警算法(有序统计恒虚警算法)对杂波功率进行估计[11],该虚警算法通过对参考单元进行排序比较的方法确定杂波门限,进而将杂波门限与检测单元进行比较,判别目标的方式为当检测单元功率值大于杂波门限即判断为目标,否则不是目标。该虚警算法能够有效解决传统虚警算法中存在的目标自遮蔽效应和无法区分距离较近目标的缺陷,而且适合多目标复杂背景的探测环境,具有工程实用性。
3) 峰值搜索进一步确定目标。当对求模后的数据进行虚警处理后仍避免不了虚警目标的混入,因此需要进一步进行峰值搜索处理,具体方法为:首先对虚警后输出的数据进行归一化处理(先求虚警后数据最大值,然后将所有数据除以最大值),对归一化的数据进行门限设定,本系统设定门限值为0.5,即当输入的数值小于等于0.5时即判为虚假目标,不作处理,当输入数值大于0.5时,判断其是否大于左右相邻数据,若是大于则为目标此时输出该目标对应的上扫频或下扫频距离单元号,依次操作,直至输出所有目标距离单元号。
4) 多目标角度容差配对。根据RX1对应的目标上下扫频谱峰坐标和RX2对应的目标上下扫频谱峰坐标取出RAM1和RAM2中对应的目标复矢量,取该复矢量的虚部和实部输入到Cordic算法模块分别求出RX1上下扫频相位值和RX2上下扫频相位值,然后对RX1和RX2的上下扫频相位作差处理求出相位差Δφ,将Δφ代入式(9)求出目标角度,将上扫频角度和下扫频角度进行容差判断后对Cordic模块输出的对应该角度的目标上下频峰值能量进行容差判断,若差值角度差值Δθ≤0.02 rad,且上下扫频峰值能量小于等于2 dB时则对上下扫频目标进行配对,否则不进行配对,最后将配对后的目标上下扫频差拍频率代入式(5)和式(6)计算出目标距离速度。
以上所述为FPGA数据处理整体流程。
4 系统测试
本系统射频中心频率为24 GHz,射频带宽为180 MHz,LFMCW调制周期为0.02 s,上下扫频各采样1 024点,本次测试主要对视野范围内运动状态不同的4辆汽车进行测量,测试环境选择相对空旷的平坦地区。通过在线逻辑分析仪截取不同时间段FPGA处理后的数据,将数据导入Matlab进行谱图观察分析,图6是RX1和RX2采样后输出的数字化中频回波数据,图7和图8为FPGA进行FFT变换后的频谱图,频谱图中峰值幅度为目标信号功率,单位为dB,峰值横坐标代表目标信号差拍频率,通过后续虚警算法和谱峰搜索锁定目标峰值,进行求角和距离速度匹配便可得到目标最终信息,表1为未配对前的目标频率和角度信息,表2为角度容差配对后得到的目标频率信息对比图,表3为实际目标信息和测量目标信息对比图。

(a) RX1中频时域采样信号

(b) RX2中频时域采样信号图6 中频回波采样信号

(a) RX1上扫频中频频谱图

(b) RX1下扫频中频频谱图图7 RX1上下扫频FFT后频谱图
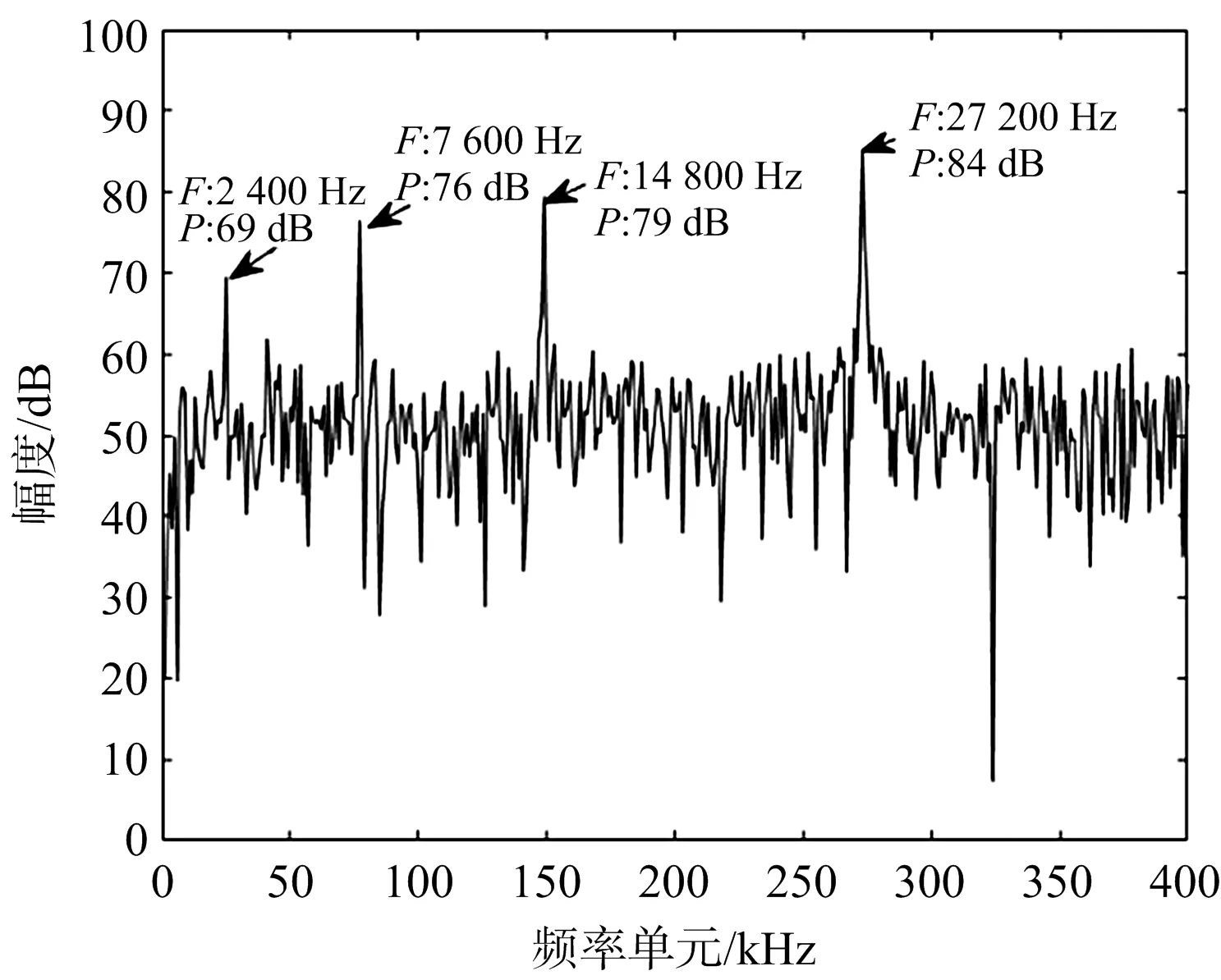
(a) RX2上扫频中频频谱图

(b) RX2下扫频中频频谱图图8 RX2上下扫频FFT后频谱图

未匹配前序号上扫频频率/Hz下扫频频率/Hz上扫频角度/(°)下扫频角度/(°)124002080057.09.4276001000010.130.6314800440032.711.342720024009.858.1

表2 角度容差匹配后
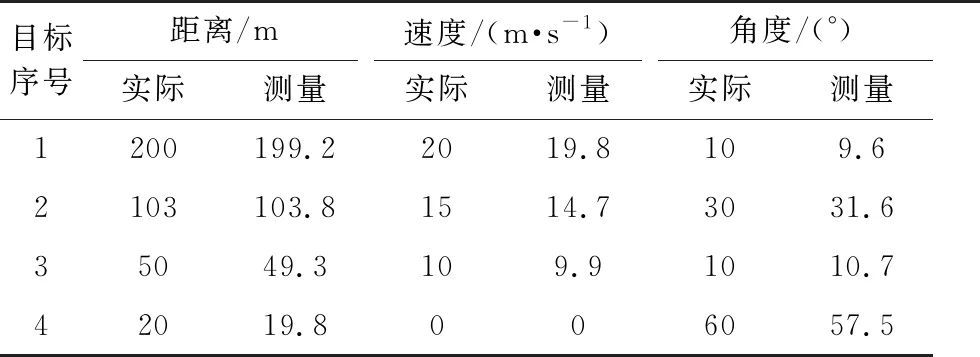
表3 实际数据与测量结果对比
通过大量现场实测证明,目标正确匹配概率达到95%,且测距均方根误差能够保持在3%左右,测速均方根误差保持在4.2%左右,测角均方根误差保持在7.2%左右,系统实时性强,数据刷新率保持在20 Hz,能够满足实际探测需求。
5 结束语
本文基于单发双收射频前端设计了一种LFMCW多目标雷达探测系统,该系统基于上下扫频角度一致性和峰值能量相近原则实现单周期多目标配对,并能够区分同一方位角不同距离速度的目标,有效克服了传统配对算法的缺陷,在保证系统实时性和目标探测精度的前提下减少了算法复杂度和时间复杂度。但本文设计系统是在相对空旷地区进行实测,干扰相对较少,而实际道路环境相对复杂,因此后续工作仍需对本系统进一步改进从而提高系统的实用性和抗干扰能力。
猜你喜欢
兵工学报(2022年11期)2022-12-01 12:52:12
汽车工程师(2021年12期)2022-01-17 02:29:46
军民两用技术与产品(2021年12期)2021-03-09 05:38:30
航天器环境工程(2020年3期)2020-11-04 06:46:24
物联网技术(2019年9期)2019-11-06 06:24:49
电子测试(2017年12期)2017-12-18 06:35:24
科学与财富(2017年24期)2017-09-06 09:52:35
电子制作(2017年8期)2017-06-05 09:36:15
设备管理与维修(2017年1期)2017-04-11 03:21:42
通信技术(2016年12期)2016-12-28 10:34:54