
一种高超声速飞行器攻击意图预测方法
2019-11-08 08:21:06谭贤四曲智国
西安电子科技大学学报 2019年5期
罗 艺,谭贤四,王 红 ,曲智国
(1.空军预警学院 三系,湖北 武汉 430019;2.中国人民解放军94326部队,山东 济南 250023)
近年来,高超声速飞行器飞速发展[1-2],全球首型高超声速导弹“匕首”进入战斗值班,美俄两国都在加速发展该类型的武器装备[3-4]。高超声速目标在飞行过程中机动灵活,速度快,难以对其进行有效的防御。针对国家战略安全形势和军事斗争准备需要,适应世界军事力量建设发展趋势,为了应对此类目标的威胁并及时做出防御措施,对高超声速飞行器攻击意图预测是必不可少的。
国外对目标攻击意图预测的研究起步较早,相关的研究主要围绕两个方面:模型框架研究和系统开发实现[5-6]。国内这方面的研究起步较晚,主要集中在理论方法的研究:基于推理的方法,基于知识库的方法,时间推理方法,模板技术和人工智能结合的方法,规划识别模型的方法等。由于高超声速飞行器的高机动性,并且其运动特性不同于传统的飞行目标,现有的方法不适用于其攻击意图的预测。文献[7]研究了高超声速飞行器的零控轨迹预测,文献[8]研究了基于意图的高超声速飞行器轨迹预测,文献[9]研究了高超声速飞行器的可达区域。目前这些对轨迹预测的研究也无法有效地对其攻击意图进行预测。
针对此问题,笔者研究了高超声速飞行器攻击意图的3种运动特性:飞行器运动的马尔可夫模型、航迹偏航角和可达区域。通过传感器网络获取的运动数据,得到高超声速飞行器的运动特性,以这3种运动特性为推理依据,建立动态贝叶斯网络进行推理,从而预测出高超声速飞行器的攻击意图。通过仿真实验,验证了所提方法能够对高超声速飞行器的攻击意图做出有效的预测。
1 运动特性分析
高超声速飞行器具有高升阻比的气动布局,当其再入大气后,在气动升力的托举下可以跳跃滑翔飞行,因此高超声速飞行器的运动特性与常规目标存在显著差异。
1.1 跳跃滑翔的马尔可夫过程模型
尽管高超声速飞行器具有高机动的运动特性,如图1(a)所示,但是其跳跃滑翔运动阶段的轨迹存在确定的解析关系,因此,可以根据弹道方程[9]进行状态估计:
(1)
其中,h为飞行高度,R为地球半径,V飞行器速度,γ为当地速度倾角,D为阻力,L为升力,l为射程,M为飞行器质量。该运动方程为速度坐标系下的飞行器运动方程。
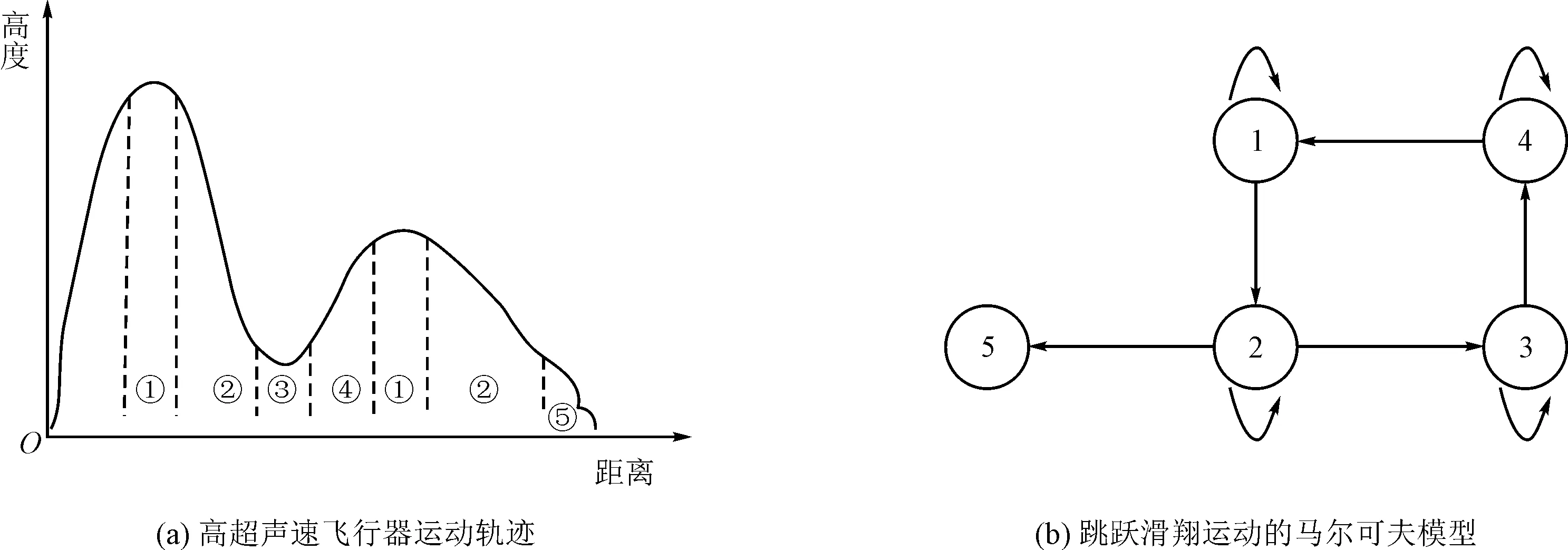
图1 高超声速飞行器运动模型
高超声速飞行器跳跃滑翔运动过程中可分为5个状态:i1为再入机动状态,i2为下降状态,i3为跳跃机动状态,i4为上升状态,i5为攻击状态。
高超声速飞行器跳跃滑翔运动由升力、重力和阻力共同作用形成。飞行器由于其特殊的气动外形,运动过程中会产生升力,通过调整飞行姿态使其升阻比会发生变化。当飞行器再入飞行时,升力较小,由于重力作用高度不断下降,经过姿态调整后,升力增大,飞行器进行跳跃机动,开始上升。平衡条件下的高度变化规律可表示为
(2)
其中,hs=7 200 m;ρ0为常数,约为0.2,最大不超过0.4;S为飞行器参考面积;CL为飞行器升力系数。
由此可定义高超声速飞行器跳跃滑翔运动过程为连续时间的马尔可夫过程{X(t),t≥0},如图1 (b)所示,其状态空间I={in|n=1,2,3,4,5},对任意0≤t1≤t2≤…tn+1及i1,i2,…,in+1∈I,有
P{X(tn+1)=in+1|X(t1)=i1,X(t2)=i2,…,X(tn)=in}=
P{X(tn+1)=in+1|X(tn)=in} 。
(3)
其概率转移矩阵为
(4)
1.2 航迹偏航角
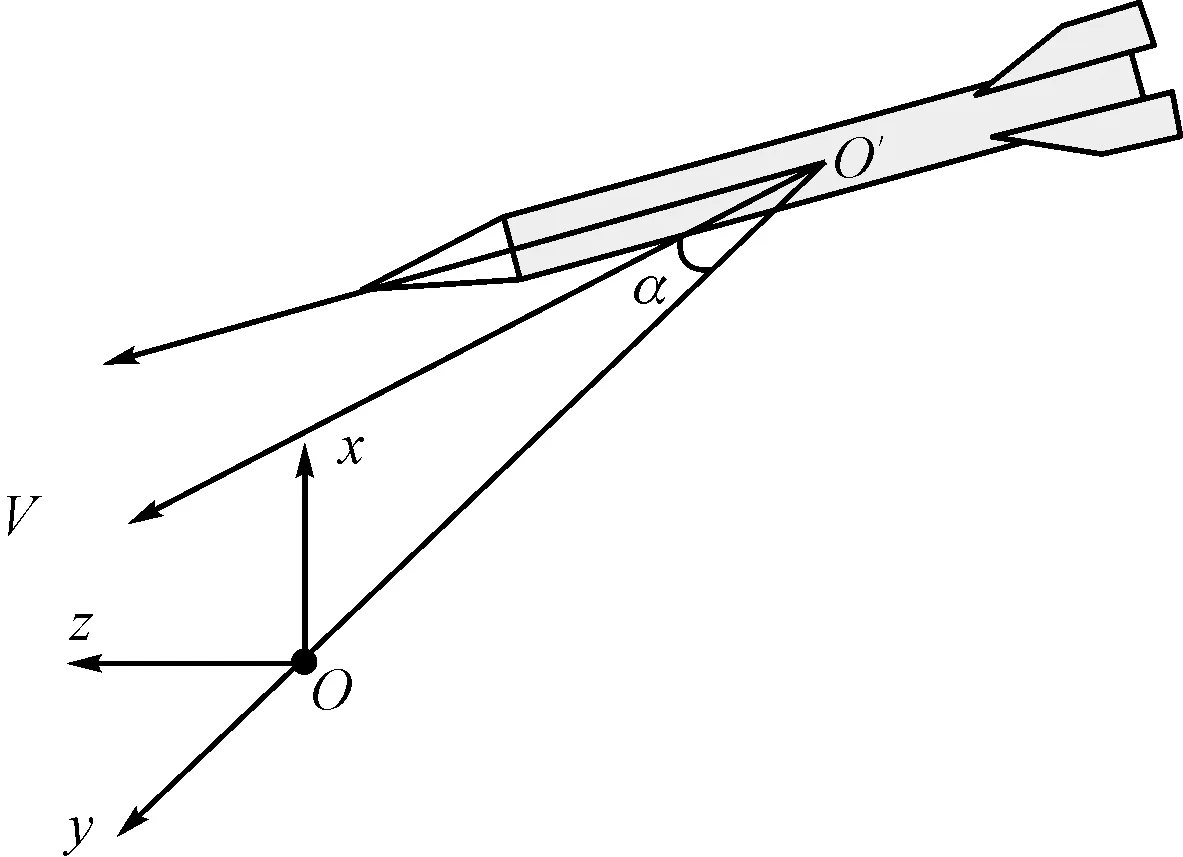
图2 航机偏航角示意图
高超声速飞行器除了在纵向上的跳跃滑翔机动,还会在横向上进行转弯机动。横向机动的特性可由航迹偏航角表示。航迹偏航角是飞行器的速度方向与目标处返回坐标系xOy平面的夹角,如图2所示。
O为目标点(返回坐标系的原点),V为飞行器的速度,α为偏航角,O′为飞行器的质心。可得航迹偏航角与速度存在如下关系:
(5)
其中,γ为航迹倾角,即航迹速度与当地水平面的夹角;ψ为航向角,即航迹速度在当地水平面的投影与正北方的夹角。
航迹偏航角在飞行器横向机动飞行时会不断改变,这些变化的值近似服从均值为零的正态分布。当飞行器朝目标点飞行时,航迹偏航角为零;当飞行器机动飞行时,飞行器的飞行方向就会偏离目标点,航迹偏航角会发生正负变化。
1.3 可达区域
由于高超声速飞行器机动性强,对于其飞行轨迹的预测难度较大,准确性较低。但是通过对飞行器飞行状态的测量可以预测其地面可达区域。可达区域是评价飞行器的机动能力的一个重要指标,在飞行器攻击意图预测中起重要作用。
根据飞行器的一阶运动模型,可达区域可表示为
(6)
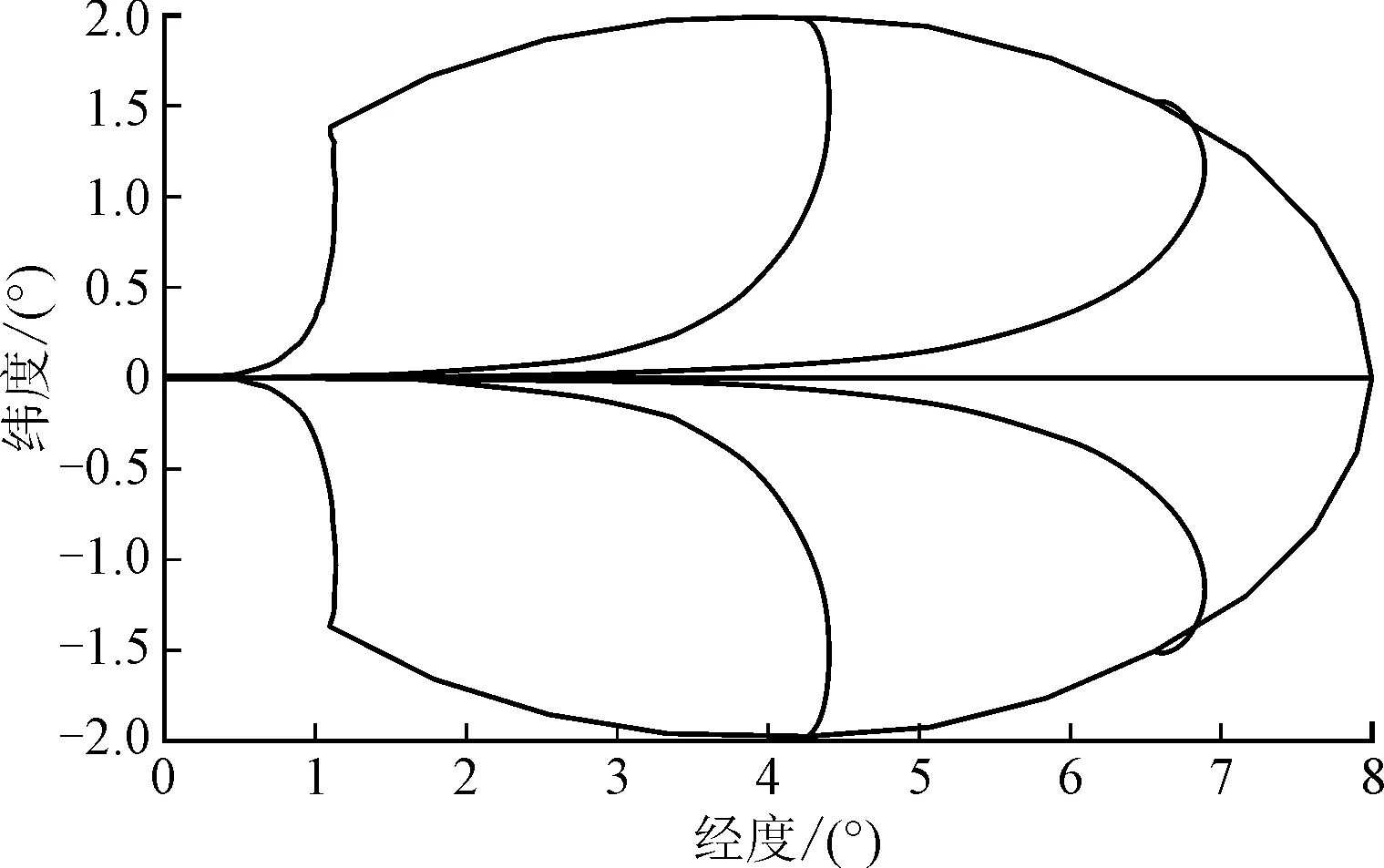
图3 可达区域示意图
其中,x为飞行器到达位置点的坐标,C和B为常量矩阵,Φ为飞行器的运动状态转移矩阵,u为加速度向量。
高超声速飞行器运动方式复杂,通过运动模型求解的可达区域精度较低,一般使用动力学模型,利用最优化的方法进行求解。求解可达区域的目标函数为
(7)
其中,λ为方向向量
解得各方向的射程的最大值和最小值组成的包络即为高超声速飞行器的可达区域,如图3所示。
2 动态贝叶斯网络意图预测算法
高超声速飞行器由于具有高机动特性,其攻击意图并不像常规目标那样明显,但也有一定的规律,有一些特征可以捕捉。攻击意图的预测,要根据对目标观测的情况结合一些经验知识进行判断,而贝叶斯网络就能够对观测数据和经验知识进行结合,从而对目标的攻击意图进行预测。
高超声速飞行器的攻击目标首先要在飞行器的可达区域内,不在可达区域内的目标则不构成攻击关系。另外,高超声速飞行器横向机动和纵向机动也是判别其攻击意图的两个因素。高超声速飞行器在跳跃滑翔运动时,如果到达目标点的状态不是攻击状态,则不构成攻击关系;在飞行器横向机动时,若相对某一目标的航迹偏航角不服从均值为零的高斯分布,也不构成攻击关系。这3种运动特性既包括飞行器的运动区域,也包括飞行器的横向机动和纵向机动,包含了飞行器攻击意图的所有信息。因此,通过这3种运动特性建立动态贝叶斯网络,可以预测高超声速飞行器的攻击意图。
2.1 动态贝叶斯网络构建
贝叶斯网络是一种通过数据变量之间依赖关系进行推理的图形模型[10]。贝叶斯网络通过直观的图形结构表示因果关系,使不确定性的推理在逻辑上变得更加清晰。
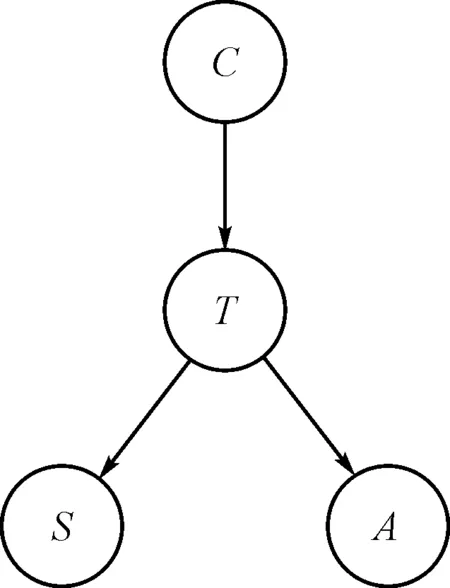
图4 静态贝叶斯网络模型
定义有向边集合E和节点集合V={C,T,S,A},其中,C、T、S和A分别对应变量可达区域覆盖、攻击目标、飞行器状态和航迹偏航角。各节点的取值类型为布尔变量,节点的取值为{真,假}。其中,节点C、S和A为证据节点,T为查询节点。飞行器的攻击目标在可达区域内,所以C是T的父节点;攻击目标确定后,飞行器才能通过横向机动和纵向机动飞向目标,所以T是S和A的父节点。因此,静态贝叶斯网络模型可表示为G=
P(C,I,S,A)=P(C)P(I|C)P(S|I)P(A|I) 。
(8)
动态贝叶斯网络[11-12]是将不同时刻的静态贝叶斯网络联系起来,每一个采样时刻都有一个与之对应的静态贝叶斯网络,这些静态贝叶斯网络节点和参数都是相同的,相邻时刻的静态贝叶斯网络有弧连接,表示其依赖关系。高超声速飞行器攻击意图预测的动态贝叶斯网络模型如图5所示。

图5 动态贝叶斯网络模型
2.2 攻击意图预测步骤
高超声速飞行器攻击意图预测的动态贝叶斯网络模型构建完成后,就可以根据对飞行器运动过程中的测量数据进攻击意图的预测。该方法的具体实现步骤如下:
(1)初始化动态贝叶斯网络。建立静态贝叶斯网络,并对各节点的概率进行初始化。
(2)计算条件概率。根据当前时刻观测到的高超声速飞行器的运动状态数据,计算各证据节点的条件概率。
根据当前测量的飞行器运动参数计算其可达区域,如果目标在可达区域中,则P(C)=1;反之,若目标不在可达区域中,则P(C)=0,即
(9)
如果飞行器攻击目标当其到达目标位置时,其状态应为攻击状态,则P(S|I)=p4p45,其中,p4为飞行器由当前状态转移为下降状态的概率,p45为飞行器由下降状态转移为攻击状态的概率。如果到达目标时,飞行器状态无法转变成攻击状态,则P(S|I)=0;如果当前飞行器状态为攻击状态,则P(S|I)=1。
(10)
其中,k为区间个数,fi为频数,pi为落在区间的概率,n为样本数。
若检验的一致性概率pe=α,则P(A|I)=pe。
(3)进行推理。根据上一时刻的推理的结果以及此刻的条件概率,可计算出目标被攻击的概率,即
(11)
其中,下标为时刻。
(4)更新推理结果,将目标被攻击的概率更新到当前网络中并保存,准备应用到下一时刻的推理中。
(5)根据各目标被攻击的概率值得出当前时刻的预测结果,进入下一时刻,重复步骤(2)。
3 实验仿真
假设战时某一高超声速飞行器袭来,航母(海上)、海上基地(海岛)、机场(陆地)和指挥中心(陆地)在其攻击范围内,根据所描述方法对来袭目标的攻击意图进行预测。高超声速飞行器的飞行轨迹如图6(a)所示,4个目标相对飞行器的位置如图6(b)所示,目标1为航母,目标2为海上基地,目标3为机场,目标4为指挥中心。该飞行器采用跳跃机动的方式避开航母周围的拦截武器,采用横向机动和纵向机动相结合的方式避开海上基地和机场周围的拦截武器,采用水平机动的方式避开指挥中心周围的拦截武器,最终的攻击目标为指挥中心。根据提出的方法得到高超声速飞行器对4个目标的攻击概率如图6(c)所示。
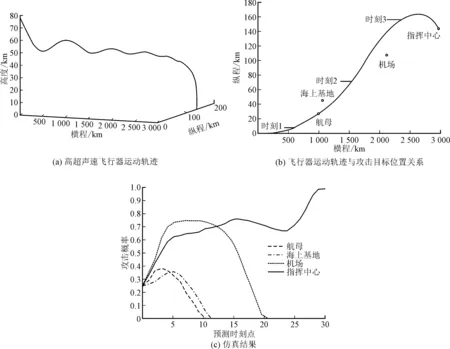
图6 仿真设定及结果
在上述仿真过程中选取3个时刻进行分析,3个时刻的数据如表1所示。
在时刻1,由于飞行器飞到航母位置时转变为攻击状态的可能性较小,所以飞行器攻击航母的概率较小。同理,飞行器相对于海上基地的航迹偏航角难以满足分布规律,所以飞行器攻击海上基地的概率也较小。
在时刻2,由于航母和海上基地不在飞行器的可达区域范围内,所以飞行器的攻击目标不是航母和海上基地。由飞行器此时运动状态可知,飞行器到达机场时转变为攻击状态的可能性较小,所以飞行器攻击机场的概率变小了。
在时刻3,由于飞行器进行机动飞行影响了航迹偏航角的状态分布,此时飞行器攻击指挥中心的概率相比上一时刻变小了。在后面的时刻,由于飞行器的攻击目标就是指挥中心,所以对指挥中心的攻击概率会逐渐变大。
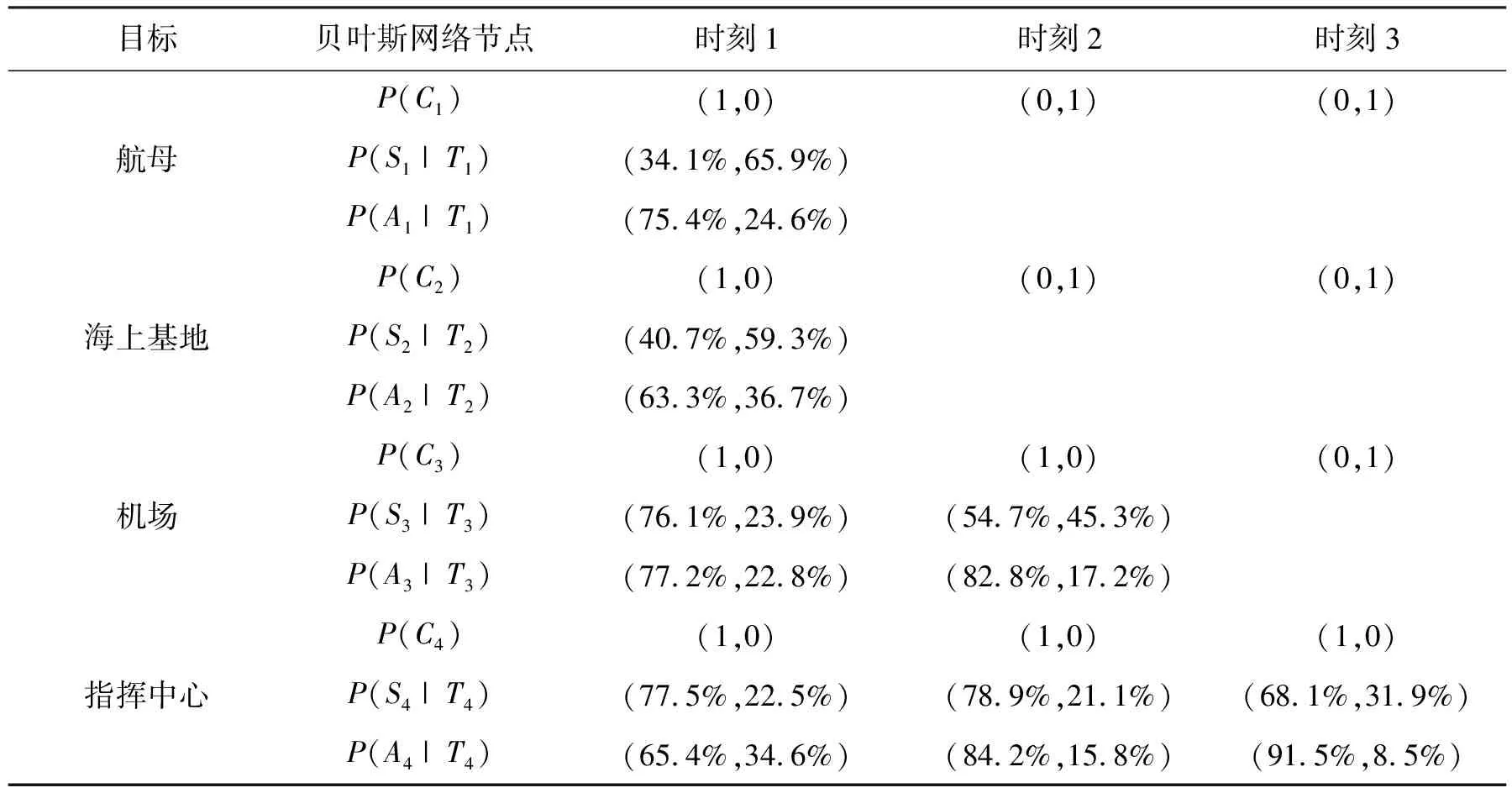
表1 3个时刻的条件概率
4 结束语
文章提出了一种高超声速飞行器攻击意图预测的方法。针对高超声速飞行器机动飞行过程中难以对其攻击意图进行预测的问题,对高超声速飞行器的运动特性进行了研究,以飞行器跳跃运动状态的马尔可夫模型、航迹偏航角和可达区域3种运动特性为证据,建立了动态贝叶斯网络,通过动态贝叶斯网络对攻击意图进行预测。仿真实验证明了所提方法的有效性。文中提出的预测方法是基于传感器的观测数据的,如何获取更准确的数据,将是下一步的研究方向。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
装备制造技术(2020年3期)2020-12-25 05:21:52
青年歌声(2019年12期)2019-12-17 06:32:32
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
