稻麦变量施肥机施肥状态监测方法
2019-11-07 02:38石绍军王玉亮1权泽堃宋悦李玉风宋子美王金星1
山东农业大学学报(自然科学版) 2019年5期
石绍军,王玉亮1,,权泽堃,宋悦,李玉风,宋子美,王金星1,*
稻麦变量施肥机施肥状态监测方法
石绍军2,王玉亮1,2,权泽堃2,宋悦2,李玉风2,宋子美2,王金星1,2*
1. 山东农业大学 山东省园艺机械与装备重点实验室, 山东 泰安 271018 2. 山东农业大学 机械与电子工程学院, 山东 泰安 271018
针对稻麦变量施肥机施肥状态监测方法可靠性差等问题,研究设计一种稻麦变量施肥机施肥状态监测方法。该方法用RFP-602薄膜压力传感器来检测排肥管中肥料颗粒的下落状态,对施肥系统的施肥状态进行监测。首先通过仿真试验对RFP-602薄膜压力传感器进行可行性验证;其次使用数字示波器来采集和储存薄膜压力传感器产生的信号,以小波包变换对信号进行能量分解得到特征向量;最后把特征向量导入BP神经网络模型进行识别训练得到分类器,训练得到的分类器经过效果检验后写入单片机,单片机与排肥管上传感器相连接就可以实现监测方法的广泛应用。试验结果表明:该方法监测精度可达95.3%。实现对稻麦播种机施肥系统排肥管堵塞问题的状态监测。
稻麦; 施肥机; 状态监测
传统施肥方式是在同一种植区域内等量施加同一种肥料,会造成肥料利用率低和环境污染等问题[1]。变量施肥技术是根据地块内不同区域对肥料的需求而改变肥料施放种类和数量的施肥方式,相比于传统施肥方式,变量施肥可以提高肥料利用率、减少环境污染[2]。
肥料在导肥管中堵塞问题是变量施肥过程中的常见问题,导肥管堵塞会造成漏施现象,现在农业生产中普遍采用人工监测方法,人工监视浪费劳力而且效果不佳。国内外部分科研机构正在研究堵塞监测方法,东北农业大学研制一种以红外二极管为核心工作部件的施肥监测仪[3],由于肥料的易潮、腐蚀和粘性等特性,以及田里工作环境易受泥土灰尘影响,实际监测中红外传感器效果不佳;南京农业大学设计一种基于光谱探测的小麦精准追肥机,近地光谱探测技术通过测距和测速来实时调整施肥量,追肥控制精度达90%[4];华南农业大学研制一种基于电容传感器的监测系统[5],该监测系统结构复杂、电容传感器安装不便,不适于广泛应用[6];北华大学设计一种以光电二极管为核心监测模块的监测系统[7],华中农业大学研究光电传感器在监测系统中的应用[8],光电传感器在实际工作中易受天气和恶劣的工作环境影响,不能保证监测精度。John Deere公司公开一种以流量传感器为核心工作部件的监测方法,流量传感器工作之前需要校准[9];Case公司研制一种播种机模糊智能监测系统,通过监控软件计算出控制率,控制速率通过CAN总线的数字输出模块输出到模糊控制器,将模糊控制应用于直流电机的无级调速,该监测系统精度为91.4%[10]。
本文针对稻麦变量施肥机监测方法存在的问题,研究一种以RFP-602薄膜压力传感器作为核心检测模块的监测方法,对施肥系统漏施和堵塞现象进行监测,该方法具有结构简单、使用方便和准确率高的优点,可实现稻麦变量施肥机监测方法的广泛应用。
1 硬件设计
1.1 试验台的构建及工作原理
排肥试验台架主要由储肥箱、台架、外槽轮排肥器、排肥管、薄膜压力传感器、肥料收集器、导轨、电机底座、步进电机构成,整体结构如图1所示。

图1 排肥试验台架
1储肥箱 2台架 3外槽轮排肥器 4排肥管 5薄膜压力传感器 6肥料收集器 7导轨8电机底座 9步进电机

图2 导肥管末端
试验时,通过控制步进电机启动带动外槽轮排肥器转动,进而模拟播种机在田间的施肥过程。当步进电机启动时,试验台架模拟正常流通的施肥过程;当步进电机停止时,试验台架模拟肥料用尽的施肥过程;当人为堵塞排肥管时,试验台架模拟排肥管堵塞的施肥过程。通过模拟三种施肥状态并调节步进电机转速和外槽轮排肥器开度,获取多组试验数据。
传感器安装在排肥管末端斜面上,传感器面积小,不会影响排肥效果。人为对导肥管进行干预,使导肥管末端堵塞,通过这种方式模拟播种机施肥过程中导肥管堵塞状况。导肥管末端结构及薄膜压力传感器安装位置如图2所示。
1.2 薄膜压力传感器概况
本方法所用RFP-602薄膜压力传感器实物如图3所示,RFP-602薄膜压力传感器是一种应变材料为半导体的电阻应变式传感器,具有灵敏度高和压阻特性稳定的特点,本方法的检测对象是强度较弱的压力信号,所以采用RFP-602薄膜压力传感器作为检测设备。RFP-602薄膜压力传感器将肥料颗粒撞击产生的压力信号转化为电阻信号,电阻信号再经过一系列处理后转化为电压信号输出到单片机[11,12]。RFP-602薄膜压力传感器部分参数如表1所示。

表1 传感器部分指标参数
2 验证薄膜压力传感器可行性
为测试薄膜压力传感器监测施肥系统施肥状态的可行性,利用如图1所示试验台架,通过启动步进电机使试验台架模拟正常流通的施肥状态;通过停止步进电机使试验台架模拟肥料用尽的施肥状态;通过人为堵塞排肥管使试验台架模拟排肥管堵塞的施肥状态。
RFP-602薄膜压力传感器安装位置如图2所示,传感器具体的安装位置是排肥管末端斜面,传感器所占空间小,不会影响排肥管施肥状态。因为传感器所占空间小且肥料下落速度较快,所以压力传感器并不能检测到每一个肥料颗粒产生的压力信号。通过把外槽轮排肥器和排肥管的三维模型导入EDEM进行仿真试验,设置肥料在排肥管中的下落速度为200粒/s,试验结果表明一定会有肥料颗粒撞击到压力传感器。仿真试验图像如图4所示,图中三种颗粒颜色表示颗粒速度大小,红色颗粒速度最快,绿色颗粒速度次之,蓝色颗粒速度最慢[13]。

图3 薄膜压力传感器

图4 排肥仿真
肥料颗粒撞击薄膜压力传感器产生的信号用数字示波器进行采集和保存,采集、保存到的数据和波形图可以使用硬盘取出进行处理分析。数字示波器主要参数如表2所示。

表2 示波器主要参数
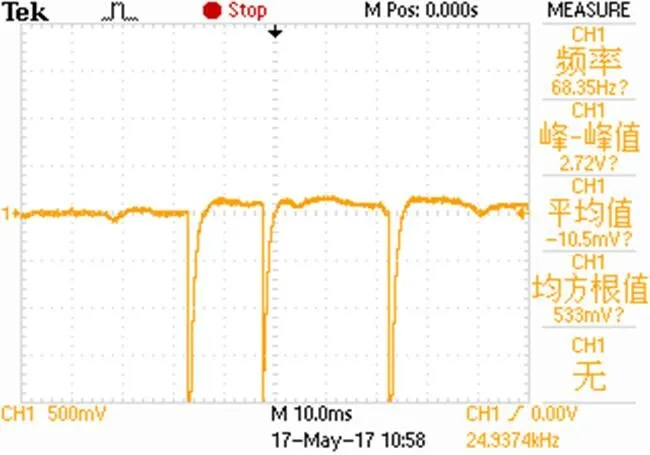
图5 正常流通时的波形图
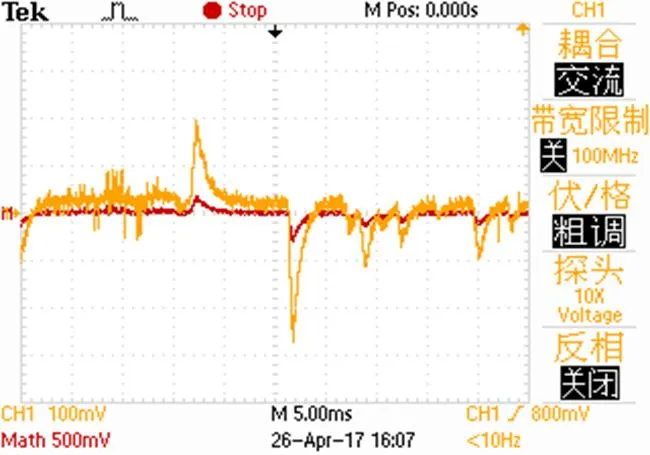
图6 产生堵塞时的波形图

图7 肥料用尽时的波形图
在正常流通、肥料用尽和排肥管堵塞三种施肥状态下各采集300组数据,用来分析不同施肥状态下波形图的差异。利用薄膜压力传感器获得三种施肥状态的波形图如下图所示,三种施肥状态下的波形图具有明显差异。图5为正常流通状态下的波形图,波形图像间歇出现向下的峰值,且峰值较大,产生这种波形图的原因是正常流通状态下肥料颗粒撞击压力传感器所产生的压力信号;如图6为排肥管堵塞状态下的波形图,波形图像有向上和向下的峰值,产生这种波形图的原因是排肥管堵塞状态下肥料颗粒持续撞击传感器所产生的压力信号;肥料用尽状态下的波形图,波形图像没有峰值(图7)。三种施肥状态下波形图差异明显,证明利用薄膜压力传感器监测施肥状态可行。
3 数据采集与信号分析
3.1 数据采集
利用如上图1所示的试验台架。当步进电机启动时,试验台架模拟正常流通的施肥过程;当步进电机停止时,试验台架模拟肥料用尽的施肥过程;当人为堵塞排肥管时,试验台架模拟排肥管堵塞的施肥过程。
当控制步进电机启动时,在试验台架的肥料箱中加入肥料,模拟正常流通的施肥过程,安装在导肥管末端的薄膜压力传感器与图8所示的信号转换模块相连接,信号转换模块再与数字示波器相连接。试验开始后,电压信号经数字示波器的作用生成波形。通过控制外槽轮排肥器的开度和步进电机的转速不同进行多组试验,可以通过数字示波器得到多组波形图,把得到的多组波形图存储在硬盘中用来进行后续的试验分析。
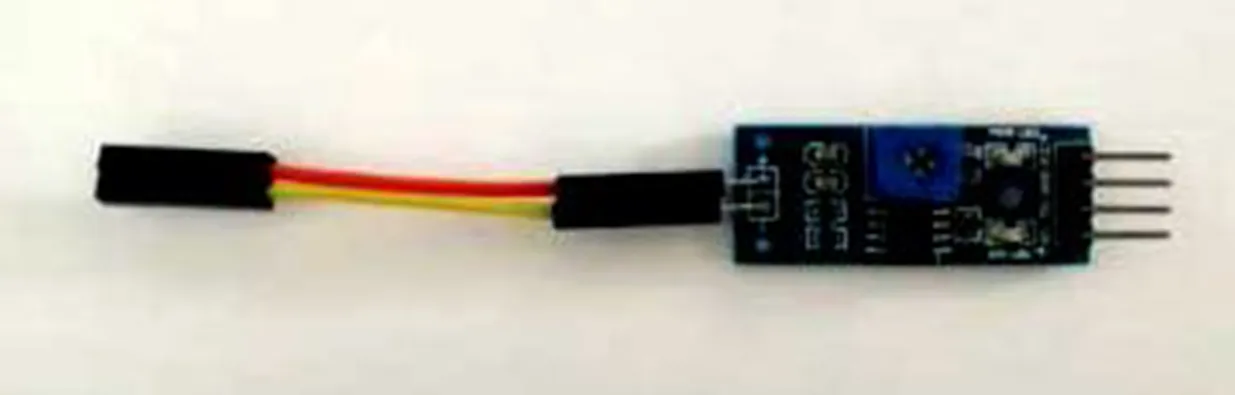
图 8 信号转换模块
试验台模拟肥料正常流通时,数字示波器显示的波形信号间歇出现向下的尖峰值,即为肥料颗粒掉落、击打在传感器应变片表面时产生的压力在数字示波器显示出来的波形图,如图9所示。
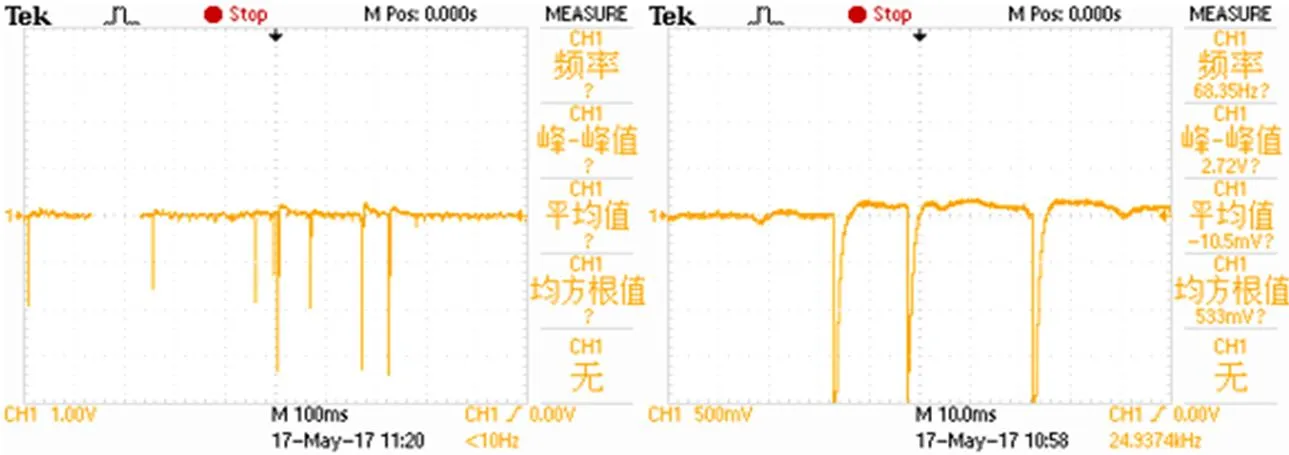
图9 模拟正常流通时的波形图
当控制步进电机启动时,在试验台架的肥料箱中不加入肥料,模拟肥料用尽的施肥过程,安装在导肥管末端的薄膜压力传感器与图8所示的信号转换模块相连接,信号转换模块再与数字示波器相连接。试验开始后,电压信号经数字示波器的作用生成波形。通过控制外槽轮排肥器的开度和步进电机的转速不同进行多组试验,可以通过数字示波器得到多组波形图,把得到的多组波形图加以存储用来进行后续的试验分析。
试验台模拟肥料用尽时,如图10所示数字示波器显示的波形信号大致是一条直线,无波峰和波谷,即为肥料颗粒掉落、击打在传感器应变片表面时产生的压力在数字示波器显示出来的波形图。

图10 模拟肥料用尽时的波形图

图11 模拟肥料堵塞时的波形图
当控制步进电机启动时,在试验台架的肥料箱中加入肥料,把如图2所示的导肥管末端封住,模拟肥料堵塞的施肥过程,安装在导肥管末端的薄膜压力传感器与图8所示的信号转换模块相连接,信号转换模块再与数字示波器相连接。试验开始后,电压信号经数字示波器的作用生成波形。通过控制外槽轮排肥器的开度和步进电机的转速不同进行多组试验,可以通过数字示波器得到多组波形图,把得到的多组波形图加以存储用来进行后续的试验分析。
试验台模拟肥料堵塞时,如图11所示数字示波器显示的波形图像有向上和向下的峰值,产生这种波形图的原因是排肥管堵塞状态下肥料颗粒持续撞击传感器所产生的压力信号,即为肥料颗粒掉落、击打在传感器应变片表面时产生的压力在数字示波器显示出来的波形图。
3.2 基于小波包变换的信号分析
小波分析是在Fourier(傅里叶)分析的基础上发展起来的。因为小波分析具有良好的时频局部化分析能力,所以小波分析被广泛应用于信号处理等诸多领域。由于db3的时域有限,支持增强,实时性好[14]。
db小波不依赖于傅里叶变换,具有时频局部特征良好和多分辨率分析的优点,运算不占额外的存储空间,适合于硬件系统的实现[15]。所以本方法采用“db3”小波基分别对三种施肥状态下的信号进行小波包分解,小波尺度函数和小波函数如图12所示。

图12 小波尺度函数和小波函数

图13 小波树
利用“db3”小波基对三种施肥状态下的信号进行小波包分解得到不同施肥状态下的小波树,小波树如图13所示。小波树中(0,0)节点代表原始信号,(a,b)节点的含义为第a层小波包分解之后第b个节点的系数。
3.3 小波包特征提取
3.3.1 小波包特征提取实例每个训练数据中的样本数为212,下面说明构成特征矢量的每个技巧[16]。对第5级分辨率进行小波包多分辨率分析得到32个子频带,每个子频带包含128个小波包系数;
根据第5级分辨率的每一个子频带,计算小波包系数所包含的平均能量使得:

3.3.2 小波包特征提取应用三层小波包分解后产生8个子频带,如图14所示为子频带的能量分布。归一化处理8个子频带能量,得到的8维特征向量作为施肥状态识别的特征向量[17]。
特征矢量的标准化和调整在训练神经网络的收敛性中起着关键作用[18]。如果不进行标准化,网络将不能收敛于期望的网络错误,网络的收敛性会导致偏离而且给真实检验数据进行加权是必要的。

图14 三种施肥状态下能量分布
3.4 BP神经网络模型识别训练
利用BP神经网络模型对三种施肥状态进行识别训练[19]。选用的神经网络拓扑结构具有一个隐含层,神经网络拓扑结构输入层有8个神经元,8个神经元分别对应特征向量的8个分量;神经网络拓扑结构输出层有“0”和“1”两个神经元,通过两个神经元的组合可以表示三种施肥状态类型[20]。通过把训练目标精度调至0.02,从三种施肥状态的特征向量中各选取150组作为样本进行训练,当样本训练进行到第317次时,训练迭代停止,收敛到稳定值得到分类器。
3.5 分类器效果检验
利用SPSS软件对得到的分类器进行效果检验[21],分别从正常流通、排肥管堵塞和肥料用尽三种状态下各取100组作为检测样本,用检测样本测试该方法的识别效果(表3)。在表3中:正常流通施肥状态下的识别正确率为92%,被误判为排肥管堵塞状态的概率为8%,正常流通状态在三种施肥状态中识别正确率最低;排肥管堵塞施肥状态下的识别正确率为94%,被误判成正常流通施肥状态的概率为6%;肥料用尽施肥状态下的识别正确率为100%,在三种施肥状态中识别正确率最高。样本测试得到的总体识别正确率达95.3%,表明该方法满足施肥系统施肥状态的监测要求。

表3 识别结果统计
4 结论
(1)研究一种稻麦变量施肥机施肥状态监测方法。该方法用RFP-602薄膜压力传感器来检测排肥管中肥料颗粒的下落状态,对施肥系统的施肥状态进行监测。
(2)通过仿真试验对RFP-602薄膜压力传感器进行可行性验证;其次使用数字示波器来采集和储存薄膜压力传感器产生的信号,以小波包变换对信号进行能量分解得到特征向量;最后把特征向量导入BP神经网络模型进行识别训练得到分类器,训练得到的分类器经过效果检验后写入单片机,单片机与导肥管上传感器相连接就可以实现监测方法的广泛应用。
(3)通过搭建试验台架模拟田间实际施肥过程。试验结果表明:该方法的监测精度可达95.3%。实现对稻麦播种机施肥系统导肥管堵塞问题的状态监测。
[1] 陈金,赵斌,衣淑娟,等.我国变量施肥技术研究现状与发展对策[J].农机化研究,2017,39(10):1-6
[2] 刘成良,苑进,刘建政,等.基于ARM和DSP的双变量施肥控制系统设计与试验[J].农业机械学报,2010,41(S1):233-238
[3] 果莉,迟天阳,欧阳斌林,等.气吸式播种机的施肥监测仪:中国,CN2650121Y[P].2004-10-20
[4] 陈满,施印炎,汪小旵,等.基于光谱探测的小麦精准追肥机设计与试验[J].农业机械学报,2015,46(5):26-32
[5] 罗锡文,资双飞,苗峻齐,等.一种施肥机监控系统:中国,CN102349388A[P].2012-02-15
[6] 张书慧,齐江涛,廖宗建,等.基于CPLD的变量施肥控制系统开发与应用[J].农业工程学报,2010,26(8):200-204
[7] 陈广大,马占辉,马超,等.基于ARM的玉米免耕播种施肥机监控系统设计[J].中国农机化学报,2016,37(5):209-212
[8] 王贤锋.光电传感器在农业机械中的应用[J].农业技术与装备,2007(8):14,16
[9] Landphair DK. Method of calibrating the meter of a product distribution apparatus and monitoring method: Canada, CA20112747523[P].2011-07-29
[10] Ruicheng D, Bingcai G, Ningning L,. A Design and experiment on intelligent fuzzy monitoring system for corn planters[J]. International Journal of Agricultural & Biological Engineering, 2013,6(3):11-18
[11] 魏新华,张进敏,但志敏,等.冲量式谷物流量传感器测产信号处理方法[J].农业工程学报,2014,30(15):222-228
[12] 焦敬品,于兆卿,刘文华,等.基于小波变换的薄层厚度电磁超声测量方法[J].仪器仪表学报,2013,34(3):588-595
[13] 施印炎,陈满,汪小旵,等.稻麦精准变量施肥机排肥性能分析与试验[J].农业机械学报,2017,48(7):97-103
[14] 张敬明,万俊,梁瑞涛,等.基于提升算法的3阶Daubechies离散小波变换的FPGA实现[J].兵工自动化,2012,31(8):78-81
[15] 周彬倩,陆继明,毛承雄,等.小波检测双电源自动转换开关电压凹陷策略[J].电力系统及其自动化学报,2015,27(3):5-10,41
[16] 许天周,黄春光.小波分析理论、算法及其应用[M].北京:国防工业出版社,2007:178-179
[17] 李明爱,张梦,孙炎珺.基于小波包和深度信念网络的脑电特征提取方法[J].电子测量与仪器学报,2018,32(1):111-118
[18] 刘崇,祝锡永.基于BP神经网络的医保欺诈识别[J].计算机系统应用,2018,27(6):34-39
[19] 李锦明,曲毅,裴禹豪,等.预训练卷积神经网络模型微调的行人重识别[J].计算机工程与应用,2018,54(20):219-222,229
[20] 孙波,黄建波,陆洁,等.基于小波SOM神经网络和多Agent系统的微电网故障诊断方法[J].舰船电子工程,2018,38(8):151-155,186
[21] 高艳红,刘伟,程国栋,等.黑河流域土壤质地分类数据建立及其模拟效果检验[J].高原气象,2007,26(5):967-974
Fertilization Status Monitoring Method of Rice and Wheat Variable Fertilizer Applying Machine
SHI Shao-jun2, WANG Yu-liang1,2, QUAN Ze-kun2, SONG Yue2, LI Yu-feng2, SONG Zi-mei2, WANG Jin-xing1,2*
1.271018,2.271018,
In order to solve the problem of poor reliability of fertilizer condition monitoring method of rice and wheat variable fertilizer machine, we designed a new method. This method used rfp-602 thin film pressure sensor to detect the falling state of fertilizer particles in the fertilizer discharge pipe and monitored the fertilization state of the fertilization system. Firstly, the feasibility of rfp-602 thin film pressure sensor was verified by simulation test. Secondly, digital oscilloscope is used to collect and store the signal generated by the thin film pressure sensor. Finally, the feature vector is imported into the BP neural network model for recognition training to obtain the classifier, which is then written into the single-chip microcomputer after effect testing. The test results show that the monitoring accuracy can reach 95.3%m this method can be used to monitor the status of clogging of discharge pipe of rice and wheat seeder fertilization system.
Rice and wheat; fertilizer applicator; condition monitoring
S224.21
A
1000-2324(2019)05-0778-06
10.3969/j.issn.1000-2324.2019.05.009
2018-12-19
2019-01-26
山东省农机装备研发创新计划项目(2016YF007);山东现代农业产业技术体系水稻创新团队资助项目和“双一流”奖补资金项目(SYL2017XTTD14)
石绍军(1996-),男,硕士研究生,专业方向:智能农机装备. E-mail:17863801101@163.com
Author for correspondence. E-mail:jinxingw@163.com
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2018年12期)2018-12-23
山东工业技术(2018年5期)2018-03-10
电子制作(2017年13期)2017-12-15
大陆桥视野·下(2017年9期)2017-09-17
电子制作(2017年20期)2017-04-26