
航天器热平衡试验用大面阵外热流动态模拟系统设计及应用验证
2019-11-07 02:23:36韩继广陶晶亮盖照亮周国锋彭光东
航天器环境工程 2019年5期
韩继广,陶晶亮,盖照亮,周国锋,陈 丽,彭光东
(上海卫星装备研究所,上海 200240)
0 引言
为保证航天器能在高真空、冷黑和热辐射的环境中正常、可靠地工作和完成各项预定任务,须在空间环境模拟器内进行热平衡试验,以获取航天器表面的温度分布数据,验证航天器热设计的正确性,考核航天器热控分系统维持航天器组件和分系统在规定工作温度范围内的能力[1]。
航天器热平衡试验时,空间外热流模拟一般采用红外加热笼(红外笼)、红外灯阵、加热片以及太阳模拟器等手段。红外笼是一种以电阻片作为辐射源的红外模拟器,具有结构简单、加工容易和造价低等优点,在航天器热平衡试验中应用较多[2]。
传统的红外笼都是固定且平行地安装在真空容器内,与航天器外表面保持100~300 mm 的距离。但是,由于红外笼加热带和工装等的遮挡以及其他加热回路的辐射热耦合,固定式红外笼模拟的热流一般最低为50 W/m2,无法满足更低热流模拟的需求。而对于高轨道卫星,进出地影时间较长(约为72 min),在地影区内接收的地球反照和地球红外辐射热流非常低,近似为0。航天器热平衡试验时,如果实际施加热流与目标值相差较大,则不能达到热平衡试验的目的,影响对航天器组件和分系统的考核。因此,航天器热平衡试验过程中能精确模拟超低热流意义重大[3]。
实现航天器热平衡试验中的超低热流模拟有2 种方法。一种方法是先不在真空容器内安装红外笼,待低温工况试验完成后再打开真空容器安装固定式红外笼,然后重新关闭真空容器进行高温工况试验。这种方式简单、可靠,但会大幅延长试验时间,耗费试验资源。另一种方法是试验开始前即在真空容器内安装红外笼,但红外笼与航天器之间的相对位置可在不打开真空容器的条件下动态改变:在高温工况时使红外笼靠近航天器,施加外热流满足高热流模拟要求;在低温工况时使红外笼远离航天器,减少对真空容器热沉的遮挡,满足超低热流模拟要求。后者相对于前者,能够有效节省试验的成本和时间。
本文采用第二种方法,设计大面积阵外热流动态模拟系统,并进行应用验证。
1 可行性仿真分析
在真空容器内动态改变红外笼与航天器之间的相对位置主要采用将红外笼平移(包括水平移动和垂直移动)的方式,使其靠近/远离航天器表面或改变对真空容器热沉的遮挡面积[4-5]。但以此方式必须在红外加热笼的上下均安装导轨才能使其平稳移动,空间占用较大。本文设计了一种可以转动的大面阵外热流动态模拟系统,其结构类似于一扇可开关的门,通过电机驱动门轴转动来改变红外笼与航天器表面间的角度(0°~90°无级可调),以达到调节高、低热流的目的。
如图1 所示,当红外加热笼与航天器表面平行时模拟高热流,垂直时模拟低热流。下面对红外笼采用转动方式模拟超低热流进行热仿真分析,分析条件为:红外笼和航天器表面尺寸均为2000 mm×2200 mm,红外笼加热带覆盖系数为0.4,表面发射率为0.9;航天器表面初始温度为0 ℃,发射率为0.8,单机等效热流取222 W/m2;环境温度为100 K;分析时间取12 h。

图 1 大面阵外热流动态模拟系统示意Fig. 1 Model of the large-area heat flow dynamic simulation system
红外加热笼与航天器表面平行和垂直2 种状态下,航天器表面接收的外热流在12 h 内变化曲线分别如图2(a)、(b)所示,降温12 h 后航天器表面温度分别如图3(a)、(b)所示。

图 2 航天器表面接收外热流变化曲线(12 h 内)Fig. 2 Variations of accepted heat flow onto spacecraft surface with 12 h
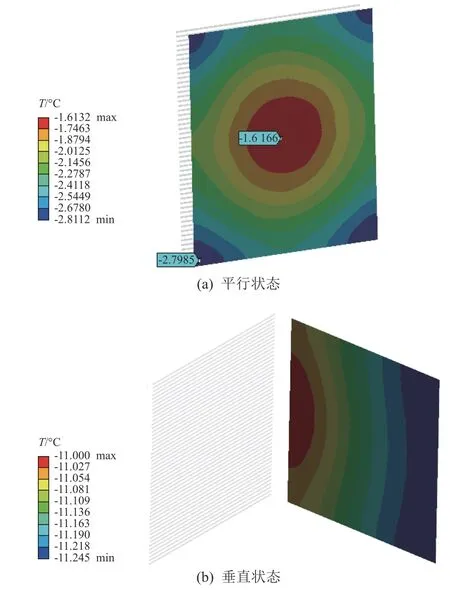
图 3 降温12 h 后航天器表面温度分布Fig. 3 Temperature distribution on spacecraft surface right after cooling for 12 h
从图2 可以看出:当红外笼与航天器表面平行时,航天器表面接收的外热流为473.79 W;而当红外笼与航天器表面垂直时,航天器表面接收的外热流降低到80.36 W,降幅达到83%。
从图3 可以看出:降温12 h 后航天器表面接收的外热流趋于稳定,当红外笼与航天器表面平行时,航天器表面平均温度只降低到约-2 ℃;当红外笼与航天器表面垂直时,航天器表面平均温度降低到约-11 ℃。这是因为红外加热笼与航天器表面平行时,对热沉形成了遮挡,使得航天器表面温度升高了大约10 ℃左右[6]。可见,采用旋转的方式将红外笼与航天器的位置关系由平行转变为垂直,可显著降低航天器表面接收的热流和表面温度。
2 系统组成与各分系统设计
大面阵外热流动态模拟系统主要由机械子系统、热控子系统和控制子系统组成(见图4):机械子系统中的红外加热笼、机构框架、传动元件(轴承、减速器等)和动力元件(电机)以及热控子系统中的电加热器、控温盒、多层和温度传感器等位于真空容器内;热控子系统的其他元件和全部控制子系统位于真空容器外。

图 4 大面阵外热流动态模拟系统组成示意Fig. 4 Configuration of the large-area heat flow dynamic simulation system
2.1 机械子系统设计
机械子系统主要由红外笼、动力元件、传动元件以及机架等组成。
本文研制的红外笼尺寸较大,其框架采用不锈钢角钢,加热带采用镍铬合金,加热带覆盖系数可在0.4~1.0 之间任意选取,高热流模拟能力较强。
动力元件即电机,选用德国进口真空步进电机,可在温度-20~200 ℃、真空度达10-7Pa 的环境下正常工作。为了使真空步进电机正常工作,其内部一般都添加润滑油,而润滑油容易污染航天器光学部件,因此需要对真空步进电机进行无油化处理,并添加难以挥发的真空专用润滑脂[7]。
传动元件主要由蜗轮蜗杆减速器、万向联轴器、球轴承及聚四氟乙烯轴套等组成(见图5)。传动元件在转轴高处采用聚四氟乙烯轴套定位,在低处采用调心球轴承和推力球轴承定位并支撑轴系。聚四氟乙烯在低温下具有良好的润滑性,且其热膨胀系数是不锈钢的10 倍左右,低温下轴套外圈与孔位的间隙变大,内圈与轴的间隙变小,可适应低温下转轴的伸缩、偏心和旋转。调心球轴承和推力球轴承的组合有利于承力,并能适应轴系偏心。旋转轴末端通过万向联轴器与蜗轮蜗杆减速器输出端转接法兰连接,可大范围伸缩,两端关节可大角度偏转,能够保证动力有效地传递到轴系上,并避免产生额外力矩。

图 5 传动元件组成示意Fig. 5 Schematic diagram of the transmission system
机架由旋转轴和支撑框架等组成:旋转轴为1 根ϕ50 mm×14 mm 的不锈钢圆管,通过上下固定板中的1 对接触球轴承安装;主体框架由120 mm×150 mm×10 mm 的不锈钢工字钢螺接或焊接而成。红外笼可通过专门设计的固定爪安装到旋转轴上,同时在主体框架上设计欧姆龙机械式限位开关,以保证试验中航天器的安全。
整个机械子系统的设计转速为9~30 (°)/min,对应每一次开门和关门的时间为3~10 min,即高、低热流工况间的转换时间最短为3 min;而传统外热流模拟装置由于红外加热笼的遮挡,无法实现从高热流到超低热流工况的快速转换,如果采用打开真空容器的方式,则转换的时间不少于5 天。可见,本系统更能满足航天器外热流快速变化的要求。
2.2 热控子系统设计
航天器热平衡试验时,其环境温度低于100 K,为了保证大面阵外热流动态模拟系统在低温环境下正常可靠使用,需要对电机及减速器等关键元件采取相应的热控措施。本文设计了如图6 所示的热控子系统,将电机和涡轮减速器安装在一个控温盒内,并采用聚四氟乙烯进行隔热安装;控温盒外表面粘贴电加热器和温度传感器,并包覆15 层多层隔热组件,内表面喷涂高发射率的黑漆。通过计算机中的控温软件设定合适的温度,结合温度传感器的温度反馈,对电机及减速器进行温度控制,以保证其能够工作在正常温度范围内[8]。同时,在机架外表面包覆15 层多层隔热组件,以减小试验时由机架温差带来的热变形。

图 6 热控子系统组成示意Fig. 6 Schematic diagram of the thermal control system
2.3 控制子系统设计
大面阵外热流动态模拟系统设计最大的难点在于如何实现真空低温环境下红外笼转动的高精度控制。本文中的控制子系统采用两级分布式控制结构进行本地控制和远程控制,利用步进电机的步进特性,通过DMC-B140-M 独立式四轴运动控制器精确控制红外笼与航天器之间的角度,控制精度优于0.5°。该控制器提供四轴电机控制接口、通用I/O 信号接口以及用户程序、数据的存储空间。用户可通过指令实现参数设置、状态查询、数学和逻辑运算、运动控制、I/O 控制等功能,同时通过限位开关和真空容器内摄像头进行安全保护和监控。控制子系统的运动控制软件主操作界面如图7 所示。

图 7 运动控制软件主操作界面Fig. 7 Interface of the motion control software
3 热耦合仿真分析
本系统研制的机械框架尺寸达到2000 mm×2200 mm,且该框架工作环境为低于100 K 的低温环境,如果设计不充分,会产生较大的热变形,导致发生过应力或卡死,因此需进行冗余设计,并进行热应力耦合仿真分析。下面选取100 K 环境下降温48 h 的机械框架进行热耦合仿真分析,此时系统呈现低温、大温差的状态;此后红外笼将转动至与航天器表面平行状态,对航天器施加外热流。
3.1 温度场分析
进行温度场分析时,边界条件如下:机架外覆多层,发射率为0.1,热沉发射率为0.9;红外笼安装框架为不锈钢,发射率为0.3;环境温度100 K;系统初始温度19.2 ℃。
降温48 h 后机械框架温度分布和降温48 h 内的温度变化仿真结果分别如图8 和图9所示。
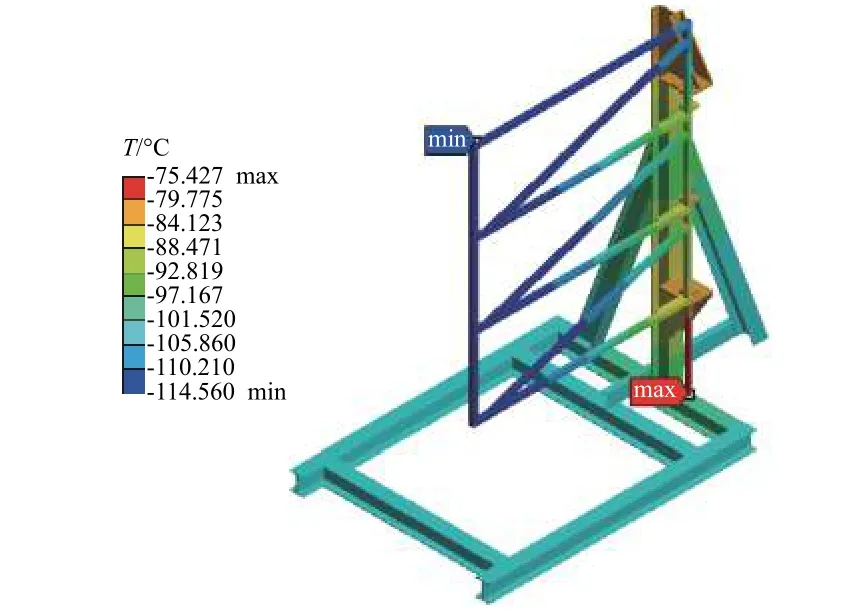
图 8 降温48 h 后的机械框架温度分布Fig. 8 Temperature distributions on the mechanical frame right after cooling for 48 h

图 9 降温48 h 内机械框架最高与最低温度变化Fig. 9 Variations of maximum and minimum temperature of the mechanical frame within 48 h cooling
从仿真结果可以看出,在100 K 的低温环境下降温48 h 后,机械框架达到了低温的状态,最低温度出现在红外笼安装框架右上角和底部框架,约-114.5 ℃;最高温度出现在转轴末端,约-75.4 ℃,温差约39 ℃。另外,最高温与最低温间的差值在48 h内先逐渐增大再出现缓慢减小的趋势,这主要是由于转轴的降温速度低于框架的降温速度。
3.2 变形与应力场分析
在图8 所示的温度场条件下进行机械框架热应力耦合仿真,边界条件为:红外笼重约25 kg,机架自身的重力以及机架底部无摩擦约束,仿真结果如图10 和图11 所示。
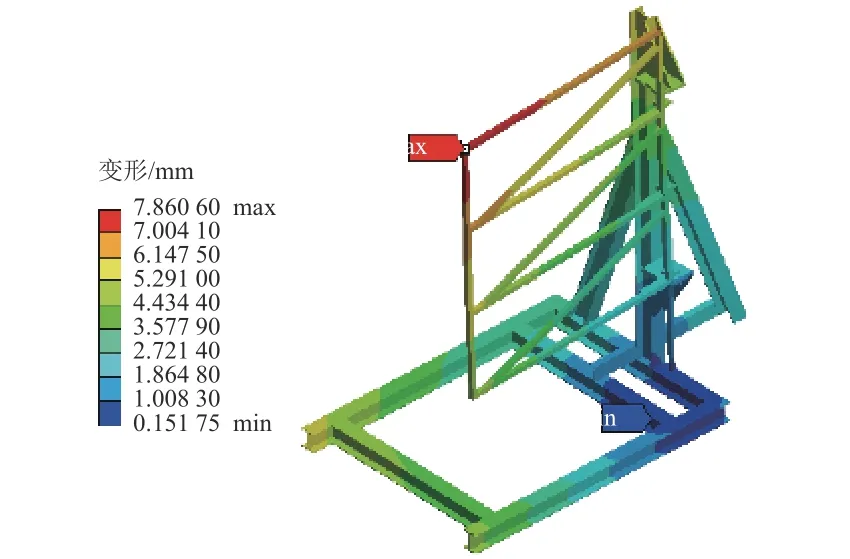
图 10 降温48 h 后机械框架变形分布Fig. 10 The deformation distribution of mechanical frame right after cooling for 48 h
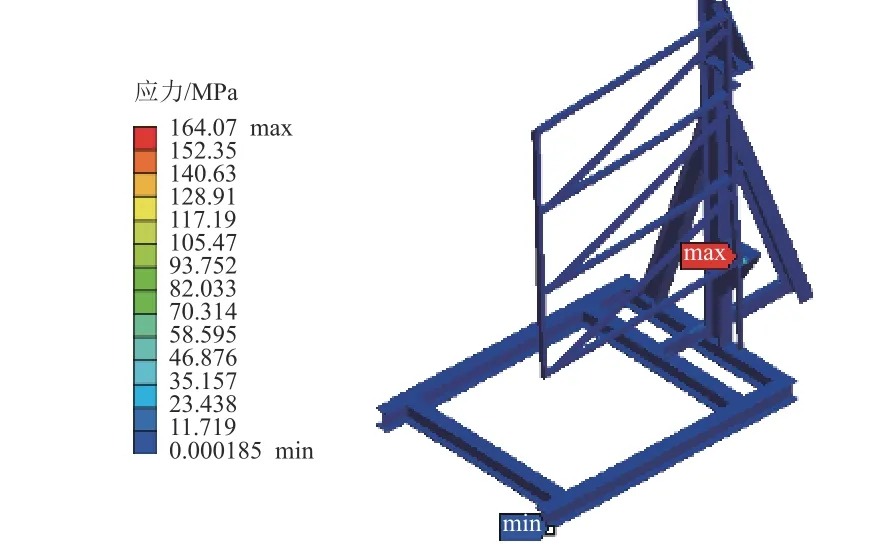
图 11 降温48 h 后机械框架应力分布Fig. 11 The stress distribution of mechanical frame right after cooling for 48 h
从图10 可知,机械框架在100 K 的环境下降温48 h 后,在竖直方向(y方向)转轴的下端发生了-0.64 mm 的变形,小于万向联轴器容许的伸缩范围;在xy平面上,转轴上端的变形为(-0.55 mm,1.33 mm),转轴下端的变形为(0.65 mm, -0.1 mm),此时转轴上、下端的偏心距离为

即转轴上、下端发生了1.90 mm 的偏心,意味着2300 mm 长的转轴发生了大约2.5′的偏心。这个偏心值远小于万向联轴器容许的偏心范围,且对于所采用的聚四氟乙烯和轴承组而言,这个偏心是可以承受的。
从图11 可知,机械框架的最大应力为164 MPa,发生在轴承支撑座位置,小于不锈钢的屈服应力(205 MPa),满足强度要求。
从上面的分析可以看出,本文设计的机械框架能够满足变形和强度要求,从而确保了大面阵外热流动态模拟系统在真空低温环境下能够连续可靠工作。
4 试验验证
大面阵外热流动态模拟系统的验证试验在真空低温环境下进行,真空容器真空度优于1.33×10-3Pa,热沉温度小于100 K。试验时,航天器在地影工况前、后各进行1 次春分平衡试验工况,2 次工况时航天器的工作状态相同,且红外笼均不加电,区别是地影工况之前的春分平衡工况中红外笼与航天器表面垂直,地影工况之后的春分平衡工况中红外加热笼转动至与航天器表面平行。选取安装在该航天器表面且工作状态不变的几个单机进行温度跟踪,温度变化曲线如图12 所示。
由图12 可见,红外笼与航天器表面平行时,航天器表面温度及内部单机温度呈现较高水平,这主要是由于红外笼加热带正对航天器表面,其对航天器表面的反射辐射较大,使航天器表面接收的外热流较高,达到50 W/m2以上。红外笼与航天器表面垂直时,航天器表面温度及内部单机温度降低约3.5~10 ℃,这是因为红外加热笼转动至与航天器表面垂直时,航天器正面没有遮挡,其接收的热流只有来自真空容器热沉的背景辐射热流(环境温度<100 K)和侧面红外笼工装的反射热流,其数值≤20 W/m2,可见采用转动方式使红外笼与航天器表面垂直,能够使航天器表面接收的外热流达到非常低的水平,并显著降低航天器表面温度及内部单机温度。个别单机实际结果比仿真结果略小,主要是由于仿真分析忽略了来自其他表面红外笼和航天器表面的辐射热。

图 12 验证试验不同单机温度变化Fig. 12 Temperature variation of different instruments in the verification test
将大面阵外热流动态模拟系统与传统外热流模拟装置进行对比(见表1)可见,大面阵外热流动态模拟系统能够同时实现航天器热平衡试验高温工况时的高热流模拟和低温工况时的超低热流模拟,有效缩短了试验时间,节省了试验成本。

表 1 大面阵外热流动态模拟系统与传统外热流模拟装置对比Table 1 Comparison between large-area heat flow dynamic simulation system and traditional heat flow simulation device
5 结束语
自研的大面阵外热流动态模拟系统攻克了真空低温环境下大尺寸机构驱动技术和高精度控制技术,将静态模拟转变为动态模拟,高、低热流转换时间最短可3 min,最低热流模拟不大于20 W/m2,更接近于在轨真实状况,解决了航天器热平衡试验低温工况采用固定式红外加热笼无法模拟超低热流的问题,成功应用于某航天器热平衡试验。
该大面阵外热流动态模拟系统研究也为部分型号在真空容器内展开、动态测量等提供了技术支撑。在后续研究中,可进一步结合动态非接触测量技术,增加热流实时检测、力矩动态测量和绝对角度测量等能力,进一步提高系统可靠性和控制精度。
猜你喜欢
国际太空(2022年7期)2022-08-16 09:52:50
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
电子制作(2018年1期)2018-04-04 01:48:22
制造技术与机床(2017年5期)2018-01-19 02:48:52
制造技术与机床(2017年5期)2018-01-19 02:48:49
中国塑料(2017年2期)2017-05-17 06:13:24
电子制作(2017年23期)2017-02-02 07:16:50
焊接(2015年1期)2015-07-18 11:07:32
