微型肠道机器人扩张机构与能量接收线圈的设计与实验
2019-11-04 08:11蒲鹏先颜国正王志武李达伟
上海交通大学学报 2019年10期
蒲鹏先,颜国正,王志武,韩 玎,柯 全,汪 炜,李达伟
(上海交通大学 电子信息与电气工程学院,上海 200240)
胃肠道疾病严重危害人类身体健康,2015年我国城市居民胃肠道恶性肿瘤的死亡率约为 0.043%,占恶性肿瘤死亡人数的 26.19%[1].目前临床上诊察胃肠道疾病常用的装备——传统内窥镜[2],不仅会给患者带来痛苦以及一系列并发症,而且无法诊察小肠.2000年,由位于以色列的Giving Imaging公司生产的世界首款真正意义上的胶囊态无线内窥镜面世[3],此后,日本Olympus公司的EndoCapsule胶囊[4]、中国重庆金山科技有限公司的OMOM胶囊[5]和韩国IntroMedic公司的Miro胶囊[6]相继问世,国内各科研机构也做了大量的相关研究[7-8].该类胶囊内窥镜成功地解决了传统内窥镜的问题,但本身也存在难以克服的缺点,比如被动前进和纽扣电池供能导致无法实现定点和长时间观察,无法完成活检等任务,并且很容易造成漏检等问题.因此,研制能够自主运动、可钳位驻留以及无线供能的微型肠道机器人成为当今生物医学工程的前沿领域[9-11].
Park等[12]研制的尺蠖式机器人采用划桨式扩张机构,通过充气扩张机构收缩和抽气扩展实现对肠道的钳位,其优点是运动性能好、运动速度快,但是这种扩张机构必须依赖外界气源而且容易划伤肠道.陈雯雯等[13]研制的结肠机器人采用气囊式扩张机构,通过气囊的收缩与扩张实现钳位,这种方式虽然不会对肠道造成损害,安全性好,但由于速度过慢而影响肠道机器人的运动速度和响应时间,且难以微型化,无法满足肠道机器人的尺寸要求.汪玮等[14]研制的叠腿式扩张机构,最大扩张半径达到 24.5 mm,变径比大,但扩张力较小,难以撑开肠道.
为确保在任意姿态下,接收线圈均能感应到交变磁场,目前解决方案为采用三维接收线圈.其缺点是外围调谐电路复杂,稳定性低,传输功率较低,无法满足肠道机器人能量要求[15-16].
本文采用螺旋腿式扩张机构设计了一种具有较大变径比与扩张力,且能够微型化的肠道机器人,并对扩张臂进行了理论分析和实验验证.进而,采用单维接收线圈、三维发射线圈,对该微型肠道机器人的无线能量传输系统进行建模分析,从磁芯厚度、绕组层数、绞线规格等方面优化单维接收线圈,使肠道机器人满足功率要求.
1 微型肠道机器人系统概述
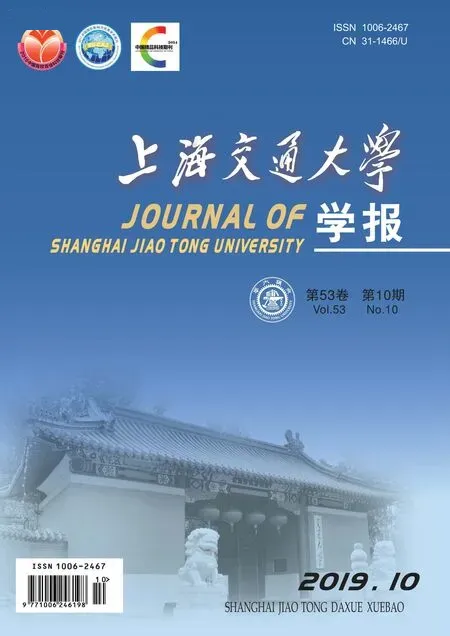
微型肠道机器人系统主要分为机器人运动、无线供能、通信控制、视频图像等模块.本文主要针对机器人运动模块的扩张机构与无线供能模块的接收线圈进行研究.运动模块采用仿尺蠖式运动原理,机器人尺寸为∅15 mm×35 mm,前后两端的扩张机构交替伸长闭合,以实现机器人的前进与后退,其运动示意图如图1所示.
仿尺蠖式肠道机器人的运动原理如下:
(1)初始状态,即前后两端扩张机构闭合,轴向机构缩短(见图1(a)).
(2)后端扩张机构打开,前端扩张机构和轴向机构不变(前端扩张机构闭合,轴向机构缩短)(见图1(b)).
(3)轴向机构伸长,前后两端扩张机构不变(前端扩张机构闭合,后端扩张机构打开)(见图1(c)).
(4)前端扩张机构打开,后端扩张机构闭合,轴向机构不变(轴向机构伸长)(见图1(d)).
(5)轴向机构收缩,前后两端扩张机构不变(前端扩张机构打开,后端扩张机构闭合)(见图1(e)).
此时,机器人重新回到运动步态(1),整体向前移动一个步距ΔS.通过将上述步态按顺序或逆序循环进行,即可实现肠道机器人的双向运动.
2 扩张机构结构及其力学分析
2.1 扩张机构结构
阿基米德螺旋线即“等速螺线”,是围着某些定点或轴旋转且不断收缩或扩展的曲线,其优点是关闭呈环状,占用空间少,并具有封闭性.本文的扩张机构基于阿基米德原理,腿结构采用铝合金制造,在其旋转打开的过程中具有一定的弹性,应力能够均匀释放,从而防止肠壁局部变形.图2所示为螺旋腿的打开和闭合过程,在直径为15 mm的圆周平面内分布着3条相隔120° 的螺线腿.
为了给螺线腿提供足够的驱动力以及相对缓慢的速度,本文设计了7级减速器,减速比高达489,采用模数为 0.2 的齿轮,减速器总体长度为 3.82 mm.扩张机构的爆炸图如图3所示.
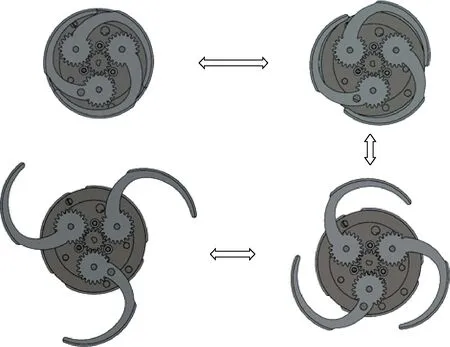
图2 螺旋腿的打开和闭合过程Fig.2 Opening and closing process of spiral leg
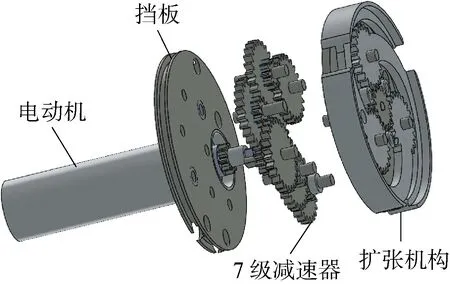
图3 扩张机构爆炸图Fig.3 The exploded view of expanding mechanism
2.2 扩张机构力学分析
扩张机构采用直流空心杯电动机驱动,型号为OT-0412NB-5557RL-15.1-200,电动机的转矩TM为 0.12 mN·m,转速NM为 57 000 r/min.减速器减速比i1=489,由于齿轮箱输出端的齿轮为15齿,螺线腿根部的齿轮为22齿,则传动比i2=1.47.螺线腿最终的转速N和输出转矩T分别为
(1)
忽略机器人的自重,则3条螺线腿的受力是相等的.图4所示为螺线腿的受力分析示意图[17].其中:O点为中心齿轮的中心点;A点为扩张臂齿轮的中心点;B点为与肠道的接触点.设:OA=r,r为两齿轮中心的距离,是一个定值;OB=m,m为扩张半径;AB=n,n为螺线腿扩张力臂;Fs为齿轮旋转时作用到螺线腿上的力;Ft为螺线腿扩张力;β为n和m的夹角.
根据力矩与力的平衡,可得
(2)
根据余弦定理,可得
(3)

图4 螺线腿受力分析示意图Fig.4 The stress analysis of spiral leg
螺线腿随着齿轮的旋转而打开或闭合,各参数值也发生相应的变化.图5所示为螺线腿在齿轮不同旋转角度下打开过程中的轨迹图.

图5 螺线腿旋转打开过程中与肠道的接触点Fig.5 The open process of spiral leg and contact point between spiral leg and intestinal tract
以螺线腿齿轮中心为原点,建立直角坐标系,则阿基米德螺旋线方程为

(4)
式中:ρ为腿的轨迹;b为螺旋线旋转的角速度;θ为极角.当螺线腿顺时针旋转β角度时,根据旋转公式,可得
(5)
如图5所示,O点坐标为(-r,0).与肠道的接触点B即为螺线腿上的轨迹到O点的最大值时取得的位置点.
设B点坐标为(xmax,ymax),则扩张半径为
(6)
且有
(7)
结合式(2)和(3),即可得Fs和Ft的解析式.
3 无线供能系统接收线圈的理论分析
本文设计的肠道机器人体内控制通信模块由稳压器LT1763-5.0 进行稳压,功率需求不低于600 mW.在5 V供电电压下,机器人系统在肠道内运动时的工作电流约为 0.14 A,而在静态时,电流大约为 0.08 A.此外,为了防止电动机堵转,机器人体内有电流检测芯片,其上限值为 0.17 A.所以其电流值在 0.08~0.17 A,相应地,机器人体内控制通信模块等效输入电阻在 29.412~62.500 Ω范围内.图6所示为双线圈无线供能系统等效电路模型.其中:V(f)为频率f的交流电压源;M为互感系数;R1和R2分别为发射电路和接收电路的串联等效电阻;L1和L2分别为发射线圈和接收线圈的电感;C1和C2分别为两侧回路串接补偿电容,同时谐振于f;RL为负载电阻.基于反射负载理论,谐振状态下的接收端对于另一侧的影响可以通过计算接收端的反射阻抗Rrr获得,
图6 双线圈无线供能系统等效电路模型Fig.6 Equivalent circuit model of two-coil wireless power transmission system

(8)

(9)
当发射线圈驱动电流为Id时,系统的传输功率P为
(10)
式中:
PL为接收回路阻抗匹配时的传输功率,即P的最大值,此时RL=R2,UC可视为功率PL的利用率.接收端功率损耗Pd是随P变化的,其关系式为
(11)
由式(10)可知,在谐振状态下,应在接收回路近似阻抗匹配时尽量增大PL,从而提高P;此外,式(11)说明功率损耗Pd是随P固有存在的,在供能充足的情况下,通过增大R2,可以在一定程度上减小接收端损耗Pd.对于在有限空间内满绕的接收线圈,优化线圈磁芯厚度、绕组层数以及绞线规格可有效提高无线供能系统性能,后续将从以上方面通过实验优化接收线圈.
4 实验分析
4.1 扩张机构实验分析
本文所设计的螺线腿机器人的r值为5 mm,b值为 3.5 mm,θ的范围为0°~180°.运用MATLAB仿真,得到图7所示的阿基米德螺线腿各参数随β变化的曲线.
由图7(a)和7(b)可见:随着β的增大,n与m逐渐增大;当β大约为120°时,接触点到达螺线腿末端,继续增大β时,n不变,m继续增大,半径变化为 7.5~16 mm.由图7(c)和(d)可见:随着β的增大,Fs和Ft逐渐减小;当β大约为120°时,接触点到达螺线腿末端;继续增大β时,Fs不变,Ft继续减小,其最小扩张力大于2 N,能满足撑开肠道所需的扩张力要求.
本文搭建测试平台以测试螺线腿的扩张力.实验环境在体外空气中,减速器输出转矩实测为70 mN·m.图8(a)所示为实验测试平台,用带刻度的夹持装置使扩张机构固定,每当扩张半径增加 0.5 mm时,调整夹持装置,使测力计与扩张臂处于同一水平线,测力计将受力大小传到上位机.图8(b)所示为扩张力与扩张半径的关系图,从图中可以看出,扩张力随着扩张半径的增大逐渐减小.实验测得的数据与理论分析整体趋势基本一致,但实验值小于理论值,其最小扩张力为 1.5 N,其原因是齿轮之间的传递存在摩擦阻力,所以力的传递是有损耗的.同时,测得螺线腿完全打开或闭合的平均时间为 1.2 s.
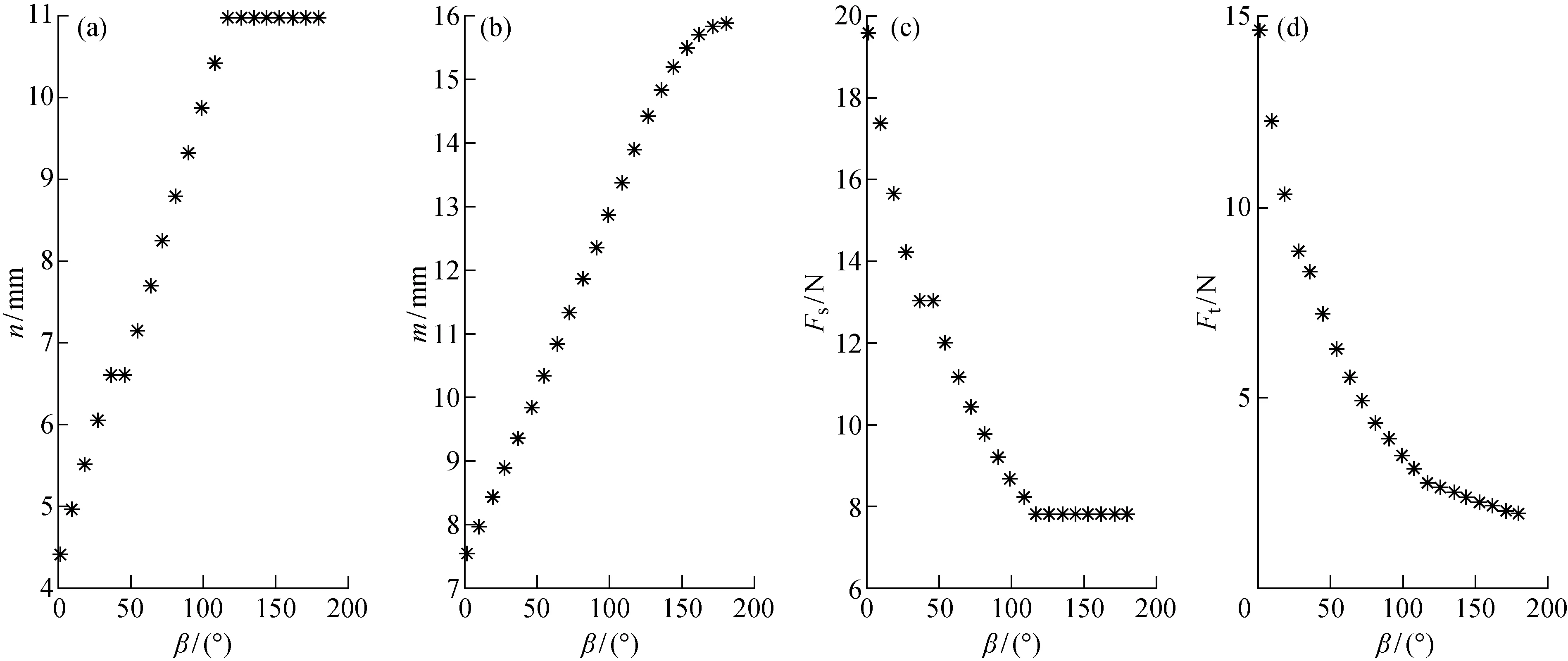
图7 螺线腿各参数随β变化的曲线Fig.7 Curves of each parameter varied with leg’s expanding degree

图8 螺线腿扩张力的实验验证Fig.8 The experimental verification of spiral leg’s expanding force
4.2 接收线圈实验分析
由于本文仅对一维接收线圈进行优化,基于课题组前期大量的工作,发射端采用螺线管对结构代替三维正交发射线圈,其直径为400 mm,采用LITZ线绕制,LITZ线绞线直径为 0.1 mm,股数为180,其参数详见表1,由型号为HIOKI 3532-50 LCR和HIOKI 9260的测试仪测得.表1中:Ls为发射线圈串联等效电感;Rs为发射线圈串联等效电阻.在频率为42 Hz时测得的发射线圈串联等效电感即是自感.功率P与发射线圈驱动电流Id有关,而Id上限由生物电磁安全性决定,借助数字化人体仿真模型和数值计算,将其设定为 1.7 A[12].由上文可知,机器人体内控制通信模块等效输入电阻在 29.412~62.500 Ω之间,可知当等效输入电阻为 29.412 Ω时,功率需求最大,因此接下来的接收线圈优化的负载电阻设为 29.412 Ω.
图9所示为需优化的肠道机器人能量接收端线圈结构.在满绕情况下,选取合适的接收线圈磁芯厚度δ、绕组层数α和绞线规格,可优化接收线圈,使系统功率P提高.磁芯材料为锰锌铁氧体R10,为保证磁芯与其内部零件绝缘,磁芯内径设为10.8 mm,而且δ应大于1 mm,以屏蔽内部零件对接收线圈的影响,机器人直径为15 mm.

表1 发射线圈参数测量值Tab.1 Measured parameters of the transmitting coil utilized

图9 能量接收端线圈结构(mm)Fig.9 Structure of power receiving coils (mm)
无线供能模块工作频率为220 kHz,为减小接收线圈交流损耗,选取内部导线线径为 0.07 mm的多股绞线,共4种,分别为3、7、10和21股.
为具体研究磁芯厚度和绞线规格对传输功率P的影响,忽略接收线圈外径小于15 mm的限制,设定δ=1 mm,α在0~6层范围内.当发射线圈驱动电流Id=1 A时,其PL和UC与α和股数的关系如图10(a)所示.PL几乎随α线性增大,随股数增大而减小,但由于R2随α迅速增大,PL的增长趋势逐渐放缓.UC受限于R2,所以UC最大值在α较小时取得,由图可知,在α=2层时,R2与RL值最接近,此时UC取得最大值.设定Id=1.7 A,根据PL和R2推算P,结果如图10(b)所示.由图可知,P随α的变化趋势和UC一致,对于不同规格绞线绕制的接收线圈,P最大值近似相等且均在R2接近RL时取得.
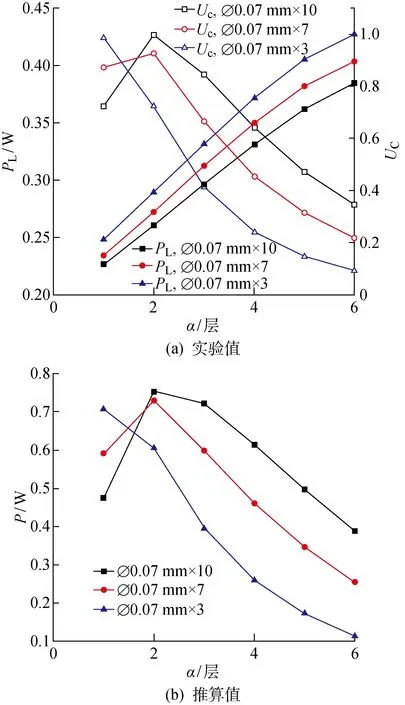
图10 接收线圈功率与绞线股数的关系Fig.10 The relationship between the transmitting coil power and the strand number of twisted wires
为了确定δ对于P的影响.设定绕制绞线股数为21,分别在δ为1、1.2和1.6 mm的磁芯上绕制接收线圈.图10(a)所示为PL和UC的实验结果.当Id=1 A时,其PL和UC与δ和α的关系如图11(a)所示.由图11可见:δ越大,PL越高且增长越快;当δ>1.2 mm时,相同层数接收线圈对应的UC变化不大.设定Id=1.7 A,根据PL和R2推算P,结果如图11(b)所示.可知增大δ可显著提高P,P随α变化趋势总体上与UC相同,但由于PL的变化率随δ增大,相较于UC,P的最大值在较大层数处取得,此时R2大于RL.
基于上述分析,P的最大值通常在R2接近RL时取得,当增大磁芯厚度或者绞线股数时,PL对应的接收线圈最优层数相应增大,最优层数应小于等于4.考虑接收线圈外径限制,接收线圈层数应不大于3层.所以设定不同绞线的接收线圈最大层数为3.为层数不同的接收线圈绕组配备相应厚度的磁芯,使接收线圈外径为15 mm.当Id=1.7 A时,上述限定条件下接收线圈构成的无线供能系统传输功率的实验结果见表2.
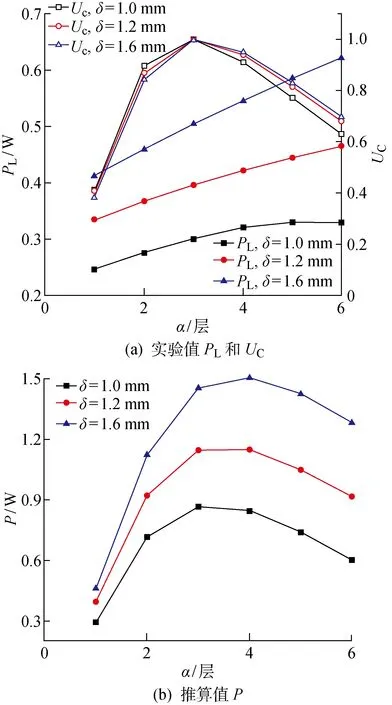
图11 接收线圈功率与磁芯厚度的关系Fig.11 The relationship between the transmitting coil power and the core thickness
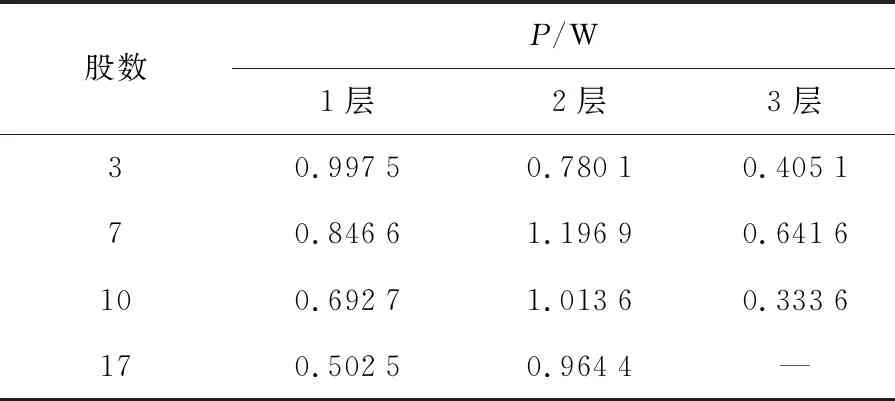
表2 限定尺寸的接收线圈对应的系统传输功率值Tab.2 System transmission power of the specified receiving coils
由表2可知,股数为7的绞线绕制的双层接收线圈使P最大化,其对应的R2计算值为43.768 Ω.当股数为17,采用3层接收线圈时,接收线圈磁芯厚度小于1 mm,内部零件将会影响系统的稳定性,故不考虑该情况下的系统传输功率值.发射线圈正常驱动电流为1.4 A,发射端电压为7 V,当选定股数为7的绞线绕制的双层线圈,磁芯厚度为1.6 mm时,该接收线圈的传输功率P为812 mW,传输效率为8.3%,能满足肠道机器人系统供能要求.接收线圈在发射线圈轴心位置,由于发射线圈直径为400 mm,接收线圈直径为15 mm,所以发射线圈与接收线圈之间的距离为192.5 mm.
5 结语
本文设计了基于阿基米德螺旋线的三螺线腿扩张机构,变径比为2.13,减速器减速比为489,最大扩张半径为16 mm,最小扩张力为1.5 N,扩张时间为1.2 s,能满足撑开肠道所需的力.基于扩张臂力学分析,分析了螺线腿打开角度与各参量之间的关系,并在管道中用实验进行验证,但还需要进一步在离体或活体肠道中进行实验验证.同时,本文对无线供能接收端的单维接收线圈进行了理论分析与实验验证,得出了采用股数为7的绞线绕制的双层线圈,磁芯厚度为1.6 mm时,接收功率达到812 mW,传输效率为8.3%,能够满足肠道机器人系统的供能要求.
现阶段,一维接收线圈虽存在传输功率姿态不稳定问题,但小型化位置姿态检测芯片技术在不断成熟,可检测机器人运动姿态,并通过控制三维正交发射线圈的磁场方向来解决姿态稳定性问题.此外,本文的理论分析与实验方法为三维接收线圈的优化设计提供了新的思路.
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
大电机技术(2022年4期)2022-08-30
清远职业技术学院学报(2022年1期)2022-01-24
舰船电子工程(2021年12期)2022-01-06
无线互联科技(2021年4期)2021-04-21
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
小猕猴智力画刊(2019年3期)2019-04-19
中国农村水利水电(2019年1期)2019-01-21
电子制作(2018年23期)2018-12-26