井间电磁成像系统地面与井下同步测量应用研究
2019-10-31 00:48张庆乐杨爱锋
石油管材与仪器 2019年5期
张庆乐,杨爱锋
(中国电子科技集团公司第二十二研究所 河南 新乡 453003)
0 引 言
井间电磁成像利用低频电磁波对两井或多井之间进行多点扫描测量,继而利用计算机层析成像技术,测量出电磁信号经过地层产生的相位变化和幅度衰减情况,从而得出地层的电阻率信息[1],生成井间电阻率分布剖面图。在测井过程中,发射在一口井中,接收可在另一口井,或在发射周围的多口井中。该技术综合了电磁感应和计算机层析成像技术的优势。与传统的电法测井相比,井间电磁成像可以探测井间区域,具有更大的探测范围,与大地电磁及地面-井电磁法相比,它具有更高的精度,更大的应用前景。
相位对于地层电参数以及位置的敏感性要优于幅度的敏感性,必须保证对发射信号和接收信号进行同步测量。然而,系统地面与井下的同步测量是保证发射信号和接收信号同步测量的基础,同时也是重点和难点所在。
为了达到发射信号和接收信号同步测量目的,必须保证地面和井下信号的同步。20世纪90年代,EMI公司推出的XBH-2000型井间电磁成像测井仪发射和接收的同步通过电缆把发射机和接收机相连[2],井下通过模拟锁相环路与地面保持同步,但当井下温度升高以及传输电缆上受到干扰时,模拟锁相环路无法锁定,地面与井下同步精度无法保证。随后,斯伦贝谢公司的DeepLook-EM井间电磁成像测井仪使用GPS进行收发同步,接收和发射同步精度为3 μs[3],地面与井下同步电路仍是模拟锁相环路,与XBH2000比同步精度有很大提高。GPS系统可以实现不同设备间的时间同步。GPS时间同步在电网状态监测、电力系统[4]等场合有广泛应用。华中科技大学周凯波等在GPS授时同步基础上,采用一定同步方法,对井下接收机和发射机时间系统进行同步授时,进而实现井下发射与接收系统时间同步,同步精度达到400 ns,地面与井下利用秒脉冲和绝对时间对时进行同步[5],此方法在传输电缆上有干扰情况下,未做出相关分析。
本文提出了在井下发射机和接收机内恢复出与地面信号同频、同相(固定相位差90°)的参考信号,用参考信号配合PLL锁相同步电路和频率补偿电路,完成了井下工作主频时钟源的建立,实现了地面和井下系统(发射和接收)的同步。
1 地面与井下同步方案设计
井间电磁成像地面与井下同步方案设计[6]框图如图1所示,地面上信号源产生一方波经过调理电路转换为差分信号,差分信号经过几千米长电缆传输到井下,井下由PLL锁相同步电路和频率自适应补偿电路组成。井下电路接收到信号后,首先经调理电路将信号转换再次转换为单端形式信号,再经过PLL锁相同步电路、频率自适应补偿电路,建立井下输出频率相位稳定的主频时钟源,实现地面与井下系统的同步。

图1 地面与井下同步框图
2 地面与井下同步电路设计
井间电磁成像要保证地面与井下的同步,这是关键点也是难点。将地面同步脉冲信号通过几千米电缆传输到井下仪器,现有的方法利用RS-485总线平衡发送和差分接收。这种信号传输方式能够抑制共模干扰,满足上千米长距离信号传输。需要指出的是,由于测井电缆共7根缆芯,地面向井下发送的同步参考信号占用2个缆芯,其它缆芯用于井下仪器的供电和通讯。特别在井间电磁发射端,井下线圈发射信号时,供电电流大,电缆线传输的同步参考信号受到严重干扰,造成下传的同步信号产生毛刺和抖动,普通锁相环路无法正常锁定,甚至导致地面与井下系统无法达到同步。为了减少电磁信号对同步信号造成的干扰,提高差分信号长距离传输质量,在井下恢复出比较稳定的同步信号,达到地面与井下系统的实时同步,设计了一种抗干扰的PLL锁相同步电路和频率自适应补偿电路。
2.1 PLL锁相同步电路
井下抗干扰PLL锁相同步电路采用了以数字锁相环为核心的锁相环路。锁相环路(Phase-Locked Loop,PLL)是一个能够跟踪输入信号相位的闭环相位跟踪系统,是由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三个基本部分组成的负反馈环路,通过比较输入信号和振荡器输出信号之间的相位差,产生误差控制信号来调整振荡器的频率,以达到与输入信号同频同相,实现两个信号的相位同步。其广泛应用于通信、无线电及电力系统等领域,实现信号处理、调制解调、倍频、时钟同步等功能[7]。
传统的锁相环各部件都是由模拟电路实现的,由鉴相器、环路滤波器和压控振荡器组成,但是由于其有复杂的外围电路,而且容易受电源电压、环境温度和外界电磁场与振动的干扰[8],在周围环境干扰较大的情况模拟锁相环路往往无法完成信号的锁定同步。项目中利用一种高速低功耗PLL锁相环路来实现。图2为PLL锁相同步电路框图。
由图2可知,该电路主要由晶振、反相器、鉴相器、K变模可逆计数器、脉冲加减电路和除N分频器构成。K变模计数器和脉冲加减电路的时钟分别为Mfc和2 Nfc,fc是环路中心频率,M和N都是2的整数幂,设计中将

图2 PLL锁相同步电路框图
两时钟频率相同,均为晶振频率。fin输入信号井下接收到是地面GPS时钟同步接收机传输下来的同步脉冲,fout输出信号是经过PLL锁相环路恢复出来的信号。其原理为:输入信号为占空比1∶1的数字信号,用A1(θin),θin代表输入相位;反馈输入信号用B(θout),θout代表环路输出信号相位,如图3所示:
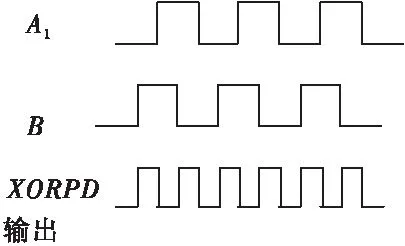
图3 锁相同步输入输出波形
异或门鉴相器比较输入信号A1相位和输出信号B相位之间的相位差
θ=θin-θout
(1)
并输出误差信号θ作为K变模可逆计数器的计数方向信号。环路锁定时,θ为一占空比50%的方波,此时的绝对相位差为90°,当PLL锁相环路达到同步状态时,fin=fout,输出信号与输入信号相位差为:
(2)
其中,Kd=4 V/Hz,K是K变模可逆计数器参数,根据实际情况而定。
2.2 频率自适应补偿环路
在测井过程中,随着井下温度的升高,晶振的值会有一定的波动,时钟频率就会发生改变,由于fc=脉冲加减电路时钟频率/2N,fc也跟着发生变化,由公式(1)可以看出,即使环路进入锁定状态时,输入信号与同步反馈信号在也存在一定的相差(90°除外)。随着fc与fin差的增大,相差也就随之增大。因而需要不断对晶振时钟进行修正,确保输入信号与同步反馈信号在全温区相差恒定。项目中,晶振选用20 MHz压控晶体振荡器。如图4所示是频率补偿环路框图。
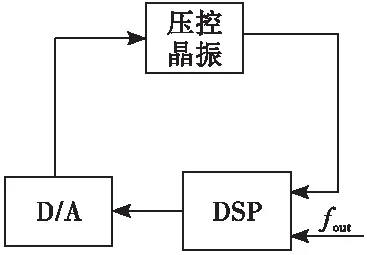
图4 频率补偿环路
利用DSP的捕获模块,可以测量出压控振荡输出频率与标称频率的误差,将频率误差转换为误差电压,在标准电压基础上增加或者去掉误差电压就可以得到精度更高的20 MHz输出信号。
如图5所示是DSP捕获示意图。A是地面GPS时钟同步接收机输出同步脉冲频率为152.587 8 Hz信号,B是压控晶振输出频率20 MHz。同步脉冲的沿抖动±50 ns,DSP捕获模块捕获沿引起的计数误差为±1个脉冲,计数器本身有±1个脉冲。若脉冲捕获沿间隔时间为8 s,则频率测量误差:
(3)
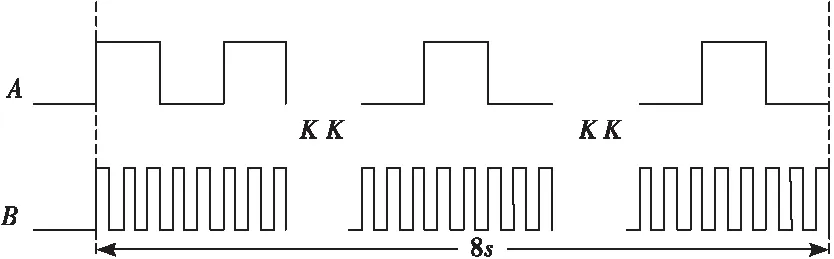
图5 捕获示意图
D/A输出的电压值为0.25~4.75 V,其对应的频率偏移如图6所示, 如图6所示是晶体频率随电压变化曲线,从图中可知,电压从0.25 V到4.75 V,频率大概偏移了600 ppm,选择16位D/A,那么D/A的控制精度为:
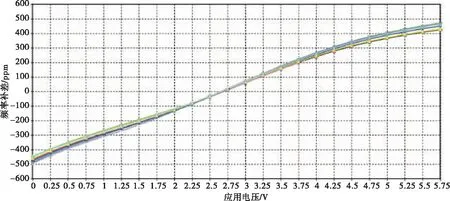
图6 晶体频率与电压关系图
(4)
由于D/A的控制精度大于频率的测量精度,因此频率的测量误差就可以当作振荡器的频率误差,即:20 MHz×0.018 75 ppm=0.375 Hz,实测中,压控晶体振荡器频率误差为:20 MHz±2 Hz。由于此压控晶振在温度-55 ℃~+125 ℃范围内偏移20 MHz±500 Hz,补偿后晶振偏移20 MHz±2 Hz,利用此频率补偿方法较好保证了晶体振荡器在全温区输出频率的稳定。
3 测试结果
针对系统设计方案进行电路验证,给出了测试结果。由于发射端工作时同步信号受供电电缆电流干扰最大,因此,以发射端测试结果为例。如图7所示是地面与井下系统在发射端不加直流高压情况下达到同步状态图。

图7 地面与井下同步状态
图7中,波形1是井下PLL锁相同步电路输入(fin)波形,波形2是经过PLL锁相同步电路恢复出来的方波(fout),两者同步时相位固定相差90°。如图8所示为发射端电缆电流在500 mA时地面与井下的同步状态。
图8中,波形1是井下PLL锁相同步电路输入(fin)波形,波形2是经过PLL锁相同步电路恢复出来的方波(fout),两者同步时相位固定相差90°。显然,从图7看出,同步信号受电缆供电电流影响,经过长电缆传输后信号上毛刺增多,然而,即使在此情况下该PLL锁相环路仍能够完成频率和相位锁定,信号达到同步,由此验证了地面与井下系统同步电路方案的正确性。

图8 电流500 mA时同步状态
4 结 论
1)设计了井下PLL数字锁相环同步电路,代替了传统的模拟锁相环路,提高了电路抗干扰性,使得系统在电缆供电电流增大,同步信号毛刺增多且受环境干扰较大情况下,仍能够完成频率和相位锁定,实现了地面与井下系统的同步。
2)随着井下温度的升高,晶振的值会有一定的波动,为了保证晶振在工作温度范围内输出频率稳定,使用压控晶体振荡器代替普通晶振,设计了频率补偿环路,使得晶振随温度自适应补偿,提高了晶振输出频率的稳定性,为地面与井下系统同步提供了保障。
猜你喜欢
科学技术与工程(2021年31期)2021-11-23
河北大学学报(自然科学版)(2021年5期)2021-10-22
辽宁科技学院学报(2021年3期)2021-07-01
时间频率学报(2021年1期)2021-04-26
中国煤层气(2019年4期)2019-11-23
通信电源技术(2018年5期)2018-08-23
电子技术与软件工程(2017年14期)2017-09-08
中国科技纵横(2015年8期)2015-08-26
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23