我国首次载人月球车任务需求分析
2019-10-31 01:35罗小桃张崇峰胡震宇王卫军刘殿富杨晓青
载人航天 2019年5期
罗小桃,张崇峰,2,胡震宇,2,王卫军,2,刘殿富,袁 勇,杨晓青
(1.上海宇航系统工程研究所,上海201109;2.中国航天科技集团有限公司空间结构与机构技术实验室,上海201108)
1 引言
载人月球车作为载人探测月面活动系统核心组成,承担月面航天员快速转移、应急救援和物资高效运输等基础功能,实现着陆点、居住舱、功能区之间协同工作,对于开展探测任务、确保航天员安全、提高工作效率等发挥着不可或缺的作用[1-2]。在航天员离开后,载人月球车可扩展为自主探测设备,提升探测综合效益。
本文分析了国内外载人月球车研究现状和技术特点,结合我国首次载人月面探测任务,从工作模式、安全、人因工程、高速移动、平台保障、工程实现、后续扩展等方面分别开展论述,分析了我国首次载人月球车的任务需求。
2 国内外研究现状
2.1 阿波罗计划载人月球车技术特点
基于地面车辆经验和月球环境,阿波罗计划研制了多款载人月球车样机,典型的样机包括:MOLAB月球移动实验室、GM四轮载人月球车、Grumman封闭驾驶舱式月球车、MTA开放驾驶舱式月球车、GM六轮SLRV型载人月球车和四轮LRV型载人月球车,如图1所示。

图1 六十年代美国研制的载人月球车Fig.1 Manned lunar rovers by USA in the 1960 s
NASA结合当时的火箭运载能力、技术成熟度和项目预算,最终选择LRV月球车(图2)。LRV月球车作为人类第一辆在月面成功运行的载人月球车,实现了月面恶劣环境下高速行驶,具有划时代意义。但LRV月球车存在以下不足:
1)未考虑自主安全。1/6 g重力高速行驶(接近15 km/h)状态,车体起伏大,高速移动时遇到障碍,车轮会离开月面,造成车体暂时失控。
2)车辆平顺性考虑不足。开放的框架结构,在穿越崎岖路面和斜坡时,高速时颠簸严重,造成航天员生理与心理压力巨大,使航天员放弃进入复杂地区。
3)故障应急方案不足。因为无应急措施,航天员舱外活动被设定在距离着陆舱5 km的范围内,以确保故障状态下步行回舱。
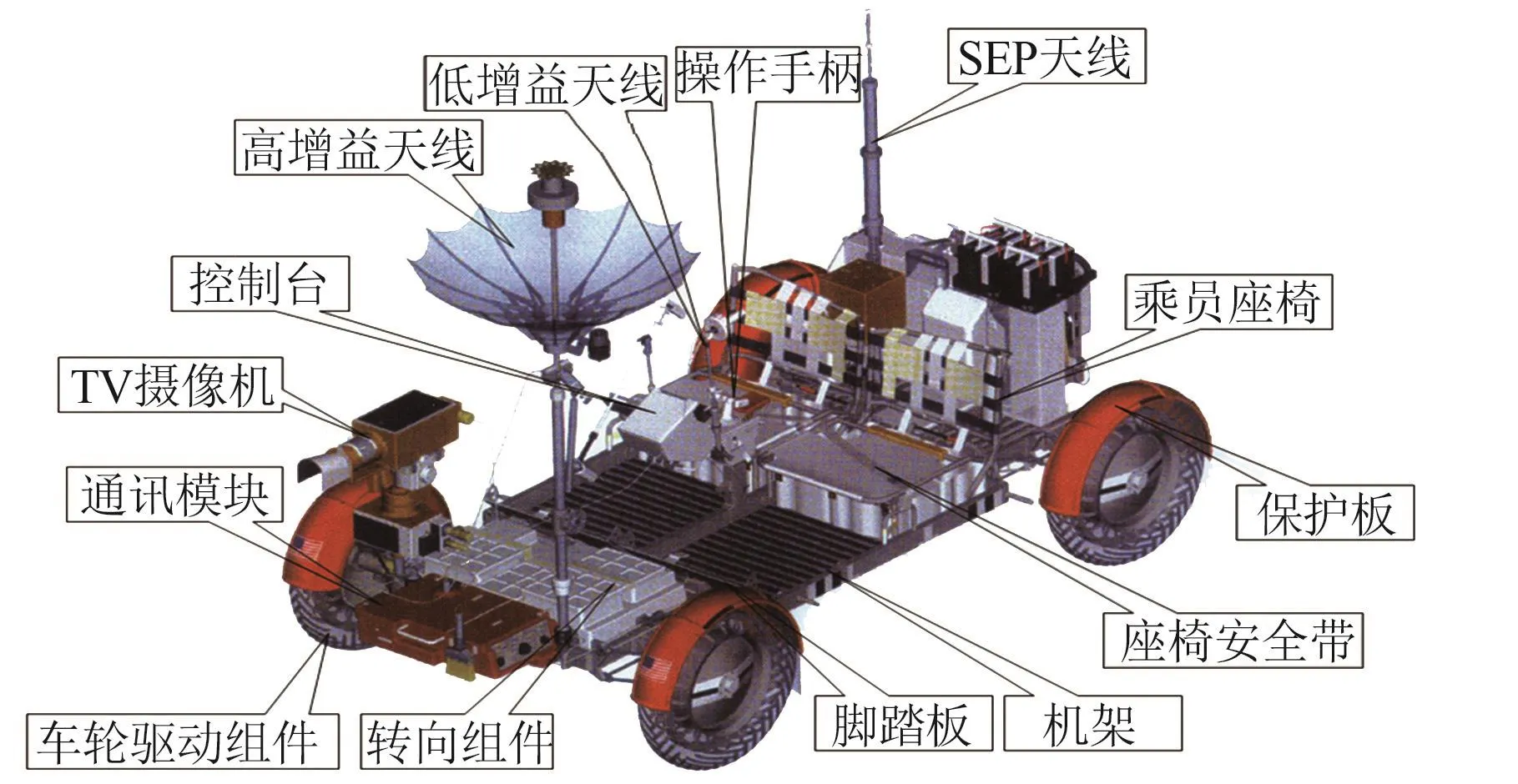
图2 LRV月球车Fig.2 LRV manned lunar rover
2.2 近期载人月球车研究进展
2017年美国提出重返月球的“月球轨道平台-门户”计划,包含由人-车-机器人组成的联合探测系统[3],NASA等着手研制新款载人月球车(图3)。欧、俄、日本、印度[4]等也相继提出了新一轮月球探测规划,明确提出了移动机器人或载人月球车需求,日本研制的典型构型见图4[5]。
从国外载人月球车概念方案和关键技术发展的新进程可知[6-7]:
1)根据任务需求与进程,一般按非加压车、加压车到多用途车3个阶段发展;
2)综合考虑结构复杂性、通过性、移动效率、功耗、重量和维护维修性等,优选轮式或轮腿式;
3)在保障航天员安全的情况下,拓展活动范围、提升运输能力、提高行驶速度一直是载人月球车追求的目标;
4)为拓展勘察范围,新型载人月球车一般兼备有人驾驶模式、无人自主巡视或遥操作模式。
2.3 国内月球车研究状况
我国已完成月球正面和背面无人月球车“玉兔号”研制(图5),但载人月球车与无人月球车在目标与需求上存在较大差异:
1)载人月球车以服务航天员为主要目标,在保障航天员安全的前提下,拓展航天员活动范围,实现航天员快速转移;

图3 国外近期载人月球车Fig.3 Recent manned lunar rovers abroad

图4 丰田月球车Fig.4 Toyota moon car
图5 中国“玉兔号”月球车Fig.5 Yutu lunar rover of China
2)载人月球车要求速度更快、承载更重、可靠性更高,满足航天员高速、安全、舒适乘坐需求,兼备在轨维修和后续扩展能力。
国内各相关单位在跟踪国外载人月球车研究的基础上,开展了载人月球车概念设计,未进行系统性需求分析与深入设计。邓宗全、高海波等[7-9]对载人月球车移动系统开展研究,尤其是阿波罗载人月球车移动功能、性能的反求与优化设计。整体来说,我国载人月球车研究还处于起步阶段,需求论证不充分,自主创新内容有限。
3 我国首次登月载人月球车需求分析
我国首次登月载人月球车应具备性能先进、理念创新等特点,结合当前技术与工程实施,对标阿波罗LRV载人月球车,从经济和技术可行性考虑,按人、车一次性发射方案,月面活动与驻留系统论证初步设定首次载人月球车指标“自重200 kg、承载500 kg、最大速度18 km/h、单次行驶里程100 km”。
3.1 任务与工作模式需求
我国载人探月初步规划为3个阶段,不同阶段对载人月球车的长远规划如图6所示。
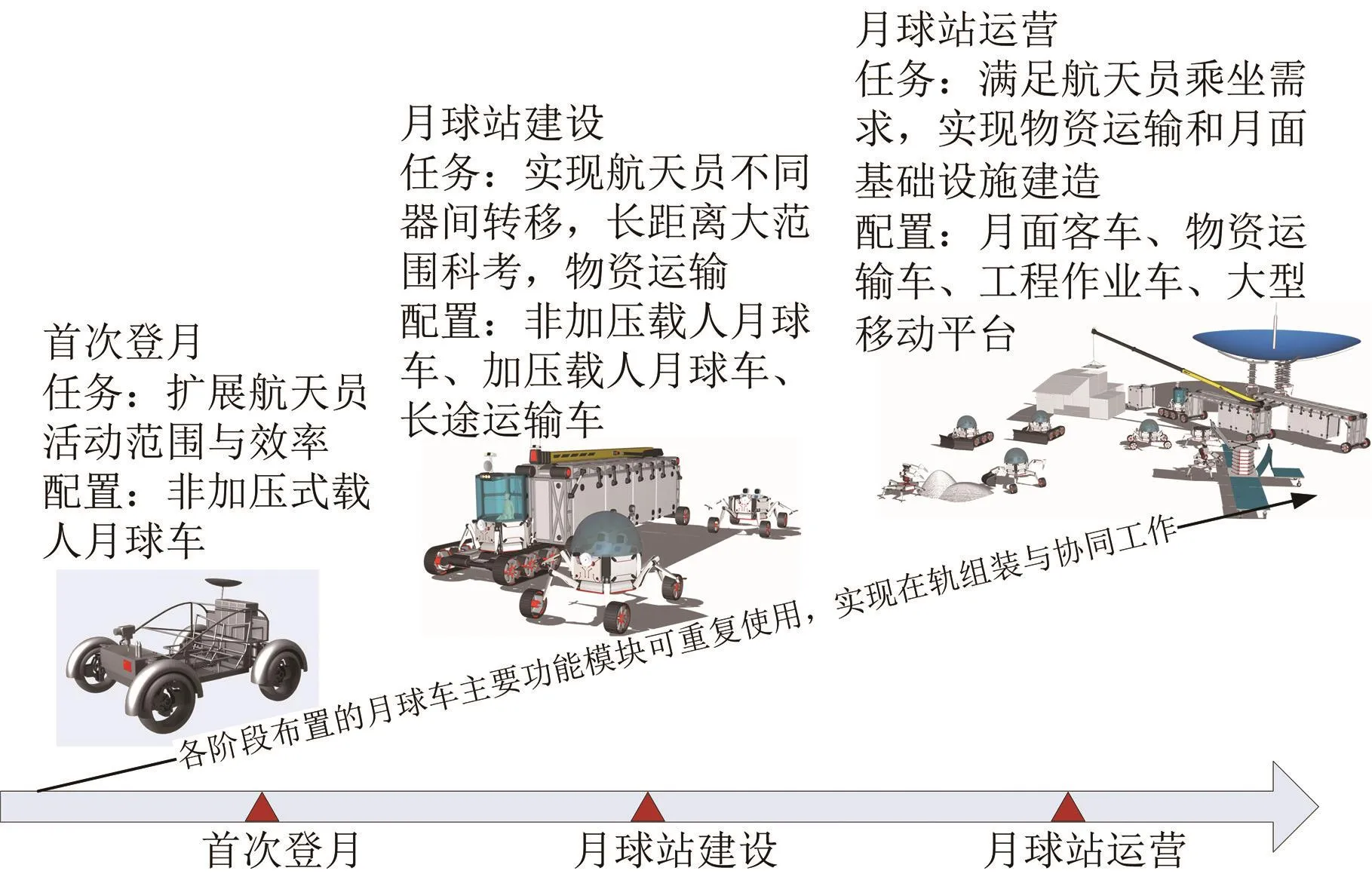
图6 载人月球车长远规划Fig.6 Long-term planning of manned lunar rover in China
从任务需求出发,我国首次载人月球车应具备以下2种工作模式,见图7。

图7 载人月球车工作模式Fig.7 Work modes of manned lunar rover
3.1.1 有人驾驶模式
航天员驾驶车辆,信息测试与反馈系统对航天员的驾驶行为、外部环境进行监测与提示。自主安全系统接收环境感知信息与车辆反馈信息,对环境中的危险情况(如深坑,陡坡等)、航天员的危险动作(车速过高等)进行告警与提醒,依据车辆自主安全算法,随时干预月球车运动。当发现航天员危险驾驶行为(如车速过高、碰撞)时,在告警无效的基础上,强制降低车速甚至停车,降低危险发生的概率,提高系统安全性。
3.1.2 无人自主或遥操作模式
无人自主模式包括编队模式和设定目标或路线自动驾驶模式。
编队模式为当航天员离开月球车进行月面作业时,载人月球车自动跟随航天员或其他车、机器人实现编队联合作业。设定目标或路线自动驾驶,主要为月面应急使用,即当航天员无法驾驶车辆时,月球车可根据内置路线,一键自动返航,将航天员送达到安全区域。
遥操作主要指登月舱内航天员、地面工作人员等通过无线指令操控月球车工作、探测。
3.2 安全需求
载人月球车的首要目标是确保航天员驾驶、乘坐、返航以及探测过程中的安全。
3.2.1 系统安全
系统安全指在设备故障、航天员失能情况下的系统应急保障能力,如一键返航、独立逃生、大沉陷脱困等,以及气、水、热、电等生保资源的补充与备份。
3.2.2 行驶安全
月面地形复杂,撞击坑分布面积约占月球总面积的40%[10]。行驶安全主要考虑载人月球车在崎岖路面高速行驶过程中的安全性,如倾覆、剧烈碰撞、车体失控、扬尘等危及航天员人身安全事件。考虑行车中的运动监显系统、类似防抱死制动系统、车身电子稳定系统等,实现载人月球车的高速平稳运行。
3.2.3 故障安全
故障安全即通过故障应对,如维修、降级使用、应急措施等,使月面车辆在故障状态下保障航天员安全和具备基本移动能力。
3.2.4 航天员失能状态下辅助安全
辅助安全主要考虑航天员无法直接驾驶、摔倒等失能状态,载人月球车识别航天员肢体语言、生理等参数,辅助航天员恢复或脱困,实现航天员安全返回。
3.3 人因工程需求
载人月球车车辆人因工程主要研究“人、服、车、环、作业”环节信息、动作的交互与作用,实现工作效率与人的健康、安全、舒适的协调。
3.3.1 人服需求
着服状态下航天员的灵活性、可视域和可达域等都会发生变化,见图8。手指对力和长度等感知灵敏度严重下降,设计时需充分考虑着服状态下航天员的可达域、可视域、关节灵活性、质量分布等影响因素,分析航天员着服后的车上坐、站姿能力,上、下车能力,作业能力等。
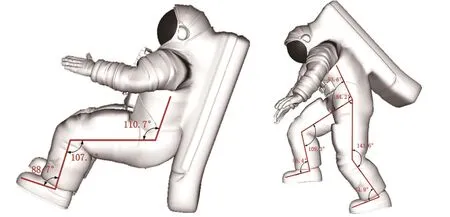
图8 着服航天员坐姿、站姿Fig.8 Sitting and standing position of suited astronaut
3.3.2 人机接口需求
载人月球车作为航天员身体的延伸与拓展,设计时需要确保信息、操作交互的顺利与流畅。确保人机接口、界面设置的合理性和人机交互的顺畅性;工作空间、显示、操控、座位等设计的合理性;色彩搭配的相适性、对人感官的舒适性;照明、声音、视觉、触觉的适宜性。同时,需要具备有效的防误操作设计。
3.3.3 月面特殊环境需求
需要考虑月面特殊环境,如月表复杂地形、低重力、月尘、辐射、温度、光照环境等对航天员的影响。同时必须考虑崎岖路面高速行驶环境对航天员的生理与心理影响。
3.3.4 月面作业需求
人、服、车的通用作业主要包括上行后的部署、乘驾与操控、在轨维护与维修、人车联合探测设置与后期扩展。不同任务需要不同的人因接口。
3.4 高速移动需求
移动速度是保障航天员月面高效、大范围探测的必要手段,也是实现不同着陆点、居住舱、功能区之间快速协同的保障,首次载人月球车考虑最大速度18 km/h。设计时需要考虑月面崎岖路面、1/6 g低重力、月壤特性,在实现载人月球车大范围高速移动的同时,还需确保驾驶的平顺性。
3.4.1 高速大范围的通过性与稳定性
考虑载人月球车的通过性、稳定性涉及轮壤力学、轮、驱动、转向、悬架以及底盘布局等。载人月球车设计时需确保高速行驶过程中足够的驱动能力、轮地附着牵引力以及行驶过程中车体稳定性,实现载人月球车在月面松软地形下高速、高效、灵活移动。
3.4.2 高速移动状态的平顺性
月面崎岖地形、1/6 g重力环境,均会导致载人月球车行驶过程中大幅振动、冲击等,对航天员生理、心理产生巨大影响。高速移动状态下的平顺性,要求从外部作用力的频率、强度、方向等出发,对于座椅、悬架、轮胎、控制策略等进行干预、减振,实现航天员心理、生理的平顺。
3.5 平台保障需求
3.5.1 能源系统
载人月球车对能源系统提出了高比能、轻量化、高安全、易维护、环境适应性好等需求,要求具备实现能源系统的智能化管理、高比能锂电快充、太阳电池重复展收、热电复合利用、无线充电等功能。
3.5.2 测控通信
载人月球车的测控通信系统涉及到人、服、车、着陆器、居住舱、环绕器、中继卫星、地面站等多个对象,业务类型和传输速率多样、物理接口复杂。需要根据不同的科学目标、工程目标和任务周期,设计高效、合理、可行的测控通信方案,完成高速移动时大数据实时动态传递,并实现功能模块集成化与轻量化。
3.5.3 导航与控制
由于月球无导航星座且表面环境复杂,载人月球车的导航控制与地面车辆相比存在较大差异,需要基于天文导航/月表三维场景/原位信息的导航技术、月表三维地图重建、高精度实时定位及路径规划等技术的支持。
3.5.4 月面环境适应性
需突破月面长期生存和过月夜瓶颈,解决月面极端高低温、强辐射、大扬尘、高真空等环境适应性问题,突破载人月球车宽温差热控、高速运动部件防尘密封、机构长寿命润滑、故障检测及维修等技术问题。
3.6 工程实现需求
3.6.1 集成技术研究
我国首次载人月球车拟实现“车重200 kg、承载500 kg、单次里程100 km”,同时希望安全过月夜和后续重复利用。自重200 kg,常规布局无法满足工程需求。工程实现时需在满足功能独立的同时优化系统集成,实现月面工作高功率驱动、协调控制、热力平衡、轻量化集成设计。
3.6.2 上行与布置需求
受运载能力、发射和着陆载荷布局等多方限制,载人月球车需考虑分步上行、分散布置或折叠,以适应有限的布局空间。在着陆后,需要考虑航天员的工作能力,实现在轨主动展开或航天员辅助展开、自动组装或航天员辅助组装,并具备与机器人联机等布置方案与接口。
3.6.3 性能评价与地面验证需求
需确定评价指标,开展验证设计、有效性评估,完成试验设备的设计与配套;开展地面等效验证试验方案研究,建立载人月球车性能评价体系,实现载人月球车月面功能、性能的有效评估。
3.7 扩展性需求
首次载人月球车任务立足于当下,需兼顾月面长期驻留、大负载运输和多样化建造等后续任务,可实现技术的移植与资源的在轨重复利用。考虑后续应用需求和场景分析,设计时应遵循模块化、在轨可重构思路,具备技术与资源从非加压车向加压、多用途车的扩展和移植能力。
4 结论
综上所述,我国首次登月载人月球车应具备以下特点:
1)工作模式多样性;
2)具有完备的航天员安全保障能力;
3)满足人因、驾驶平顺性需求;
4)可实现月面高速、大范围移动;
5)工程可实现,后续可扩展,同时保证技术继承性与创新性。
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
军事文摘(2022年8期)2022-05-25
作文大王·低年级(2022年4期)2022-04-23
国际太空(2021年8期)2021-11-05
军事文摘(2020年24期)2020-02-06
百科知识(2019年5期)2019-03-18
太空探索(2016年12期)2016-07-18
中学科技(2015年7期)2015-07-03
知识就是力量(2014年1期)2014-02-21