基于小区育种路径自对齐的小麦小区播种机改进
2019-10-28 05:23唐勇伟董振振王茂励赵景波
浙江农业学报 2019年10期
王 浩,唐勇伟,董振振,王茂励,赵景波
(1.青岛理工大学 信息与控制工程学院,山东 青岛 266520; 2.齐鲁工业大学(山东省科学院),山东省计算中心(国家超级计算济南中心),山东省计算机网络重点实验室,山东 济南 250014)
目前,在我国小麦小区育种过程中,最大的难度在于精准地控制小区长度、间隔长度、邻行小区位置。为了解决育种过程中的对齐问题,一般采用在地面人工画线,来对小区位置进行限制。对于大规模播种来说,这种工作方式的工作量巨大,并且人工操作误差大。中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)由5颗静止轨道卫星和30颗非静止轨道卫星组成,是中国自行研制的全球卫星导航系统[1]。是继美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。北斗卫星定位因其开放性和准确性而被广泛应用于农业工程[2-12]。本文将北斗卫星定位应用于小麦小区播种机上,以确定播种机的实时经纬度,通过建立相对坐标系,将播种机的位置置于数学模型中,将人工画线替换为数学模型的计算,从而实现精准的小区路径对齐控制。在建立数学模型的过程中,最为关键的过程是确定过原点的两条边界线的线性方程,建立线性方程就需要知道此方程的斜率。考虑到北斗卫星导航本身会有厘米级的误差[12],人工驾车也无法完全保证路径笔直,如果只采用行走路径中的某一点和原点,两点构成一条直线,那产生的误差将会不可估计。卡尔曼滤波作为应用广泛的噪声处理工具[13-20],通过逐层递归的方式进行线性滤波,仅需利用前一个采样周期的估计值加上当前的测量值就能够对当前状态进行准确地估计,状态方程完整地反映出了被估计量的变化规律。把最初得到的一组经纬度在相对坐标系中进行计算,得到的基准路径数学模型的初始斜率值,作为卡尔曼滤波第一个采样周期的估计值,将之后计算得到的斜率值作为测量值进行迭代处理,得到最终的最优值。
1 小区播种路径自对齐方案设计
在小麦小区育种中,要求对小区进行三个方面的对齐:在同一行内,小区长度对齐;小区与小区之间的间隔对齐;各行与各行小区、间隔也要一一对齐。小区长度和小区间隔的对齐,是通过北斗定位的经纬度,来直接计算距离。本文主要解决的是行与行的小区、间隔一一对齐问题。如图1所示,为了能够通过北斗卫星定位自动对齐小区,需要先确定并获得两条基准路径AB和AC。获得基准路径后,沿着AB路径进行第一行小区播种,播种完成后,将播种机停到D*点附近位置,此时得到D*点经纬度,通过小区路径模型的计算,可以得到此时的终点E的经纬度。此时第二行的路径已经完成规划,但因为D*点是任意选择的,为了保证第二行小区的开始位置,是第一行小区的结束位置的平移点,要计算播种开始点D的位置。通过图1可以得知D*点到E点,包含了n个小区、n-1个间隔以及D*到D的距离。因此D*到D点的计算公式为:
西藏自治区财政性教育经费的投入从2010的63.35亿元上升到2016年的175.83亿元,净增长112.48亿元。同时,教育经费占地区生产总值的比重也在呈现增长趋势。见表2。

图1 小区播种路径自对齐示意图
dis(DD*)=[dis(ED*)+dis(JG)]%[dis(XQ)+dis(JG)]。
(1)
式中:dis(DD*)为D*点到D点的距离,m;dis(ED*)为D*点到E点的距离,m;dis(JG)为小区间隔的长度,m;dis(XQ)为小区的长度,m。
当第二行播种完毕后,将播种机停到第三行D*点附近位置,此时得到D*点经纬度。通过相对坐标系计算出E点经纬度。当播种机从D*点出发后,实时计算当前位置与E点的距离,当距离为0 m时,播种工作开始。之后的播种过程中,偶数行和第二行的工作方式相同,奇数行和第三行的工作方式相同,完成了小麦小区播种路径自对齐的方案设计。
2 小区路径模型建立
2.1 基于经纬线的相对坐标系建立
小区路径模型的建立,是依赖于北斗卫星定位,接收到小麦播种机实时的经纬度信息。考虑到经线和纬线是相互垂直,本文以纬线为X轴,经线为Y轴,两条小区播种的基准路径的交点A为原点,建立相对直角坐标系,见图2。假设A点的经纬度为(LatA,LonA),B点的经纬度为(LatB,LonB)。要将B点转化为相对坐标系中的点,需要将B点分别投影到X轴和Y轴,通过计算与原点的距离,得到坐标。B点在X轴的投影的经纬度为(LatB,LonA),则投影点和A点的经度差为0,纬度差为:
diffLat=LatA-LatB。
(2)
式中:LatA为A点纬度的弧度值,rad;LatB为B点纬度的弧度值,rad;diffLat为A、B在X轴的投影点两点纬度弧度值的差值,rad。
式中:X(k)为k时刻的系统状态;X(k-1)为k-1时刻的系统状态;U(k)为k时刻对系统的控制量;A、B—系统参数;W(k)为过程噪声。
(3)
式中:L为A、B在X轴的投影点两点间的距离,m;R为地球平均半径,m。
这里得到的距离L就是B点在相对坐标系下的横坐标XB。用同样的方法,B点在Y轴的投影的经纬度为(LatA,LonB),则投影点和A的纬度差为0,经度差为:
而片猪肉激光灼刻标识技术是利用激光在片猪肉表皮上灼刻动物检验检疫章、肉品品质检验合格章、片猪肉对应授权码等标识信息。以清晰有效、不可擦除的标识信息为载体,为猪肉产品的安全可查询、可追溯提供理想的信息链基础。汪宗星向记者介绍到:“此技术利用激光束瞬时高速划过片猪肉表皮,产生局部高温物理烧灼,激光束所过之处,表层物质瞬间气化,灼刻出需要的标识信息。整个灼刻过程无任何添加物质,不会对猪肉及周边环境造成任何的污染。而消费者可在猪肉上清楚地看到检疫合格字样以及检疫具体时间。”
diffLon=LonA-LonB。
(4)
式中:LonA为A点经度的弧度值,rad;LonB为B点经度的弧度值,rad;diffLon为A、B在Y轴的投影点两点经度弧度值的差值,rad。
根据地球表面任意两点的经纬度的距离计算公式:
(5)
式中:L为A、B在Y轴的投影点两点间的距离,m;R为地球平均半径,m。
这里得到的距离L就是B点在相对坐标系下的纵坐标YB。
2.2 基于算数平均值滤波与卡尔曼滤波相融合的基准路径规划
目前,单点北斗卫星定位精度在米级,精度不足以实现精准作业。为解决单点北斗卫星定位精度不够的问题,通常会在作业点附近,架设固定基站,通过RTK技术来增强定位精度,精度可达到厘米级。在实际播种机工作过程中,由于农田环境复杂、人工驾驶水平有限等情况,常常会出现车辆打滑、震动等问题,导致车身位置出现偏移,此时定位精度虽然达到要求,但对于小区规划路径,仍将产生较大的偏差。

图2 基于经纬度的相对坐标系
由图2可知,每一行小区的路径规划都是基于AB和AC两条基准路径进行的,一旦两条基准路径的规划出现误差,在之后对其他路径的计算过程中,这个误差将会被无限放大。如果通过初始点和结束点,两点确定一条直线,那么一旦结束点的位置出现偏差,就会导致整条基准路径发生偏移。为了解决这一问题,本文提出算数平均值滤波与卡尔曼滤波相融合算法,对基准路径进行修正。想要得到相对坐标系下直线AB的方程,需要得到直线AB的斜率。通过公式(3)、(5)可以得到任意一点的坐标。则这一点与A点构成直线的斜率K,可以通过公式:
(6)
对于北斗卫星信号的接收频率为10 Hz,也就是每0.1 s会接收到一帧格式为$GPGGA的北斗信号,每次接收到当前点的经纬度后,会把当前点转化成相对坐标系中的点,计算此点与A点构成直线的斜率K。为了提高卡尔曼滤波的收敛速度,本文通过提取第一秒内的10个斜率值,使用算数平均值滤波对其处理,提高初始值的准确度。得到的平均值作为卡尔曼滤波的第一个采样周期的估计值,之后得到的斜率值作为观测值。
离散线性系统的卡尔曼模型由状态方程、节点观测方程、状态一步预测值以及更新方程组成,具体如下[21]:
h=Lcos(α);
X(k)=AX(k-1)+BU(k)+W(k)。
(7)
根据地球表面任意两点的经纬度的距离计算公式:
节点观测方程
(2) ①、②位置之间,以及③、④位置之间电机体的检测数据的变化受②、③位置之间电机体变化的影响,同时亦受车体震动、车轮不圆等因素的影响。其变化幅度虽然不大,但是变化规律比较复杂,无法从中得到电机下沉的信息。
Z(k)=HX(k)+V(k)。
与孙义的沟通中,我们发现,尽管数字印刷现时发展的大背景并不乐观,但孙义对这方领域还是保持着一种相对平和的态度。在他看来,社会化大生产之下,每个企业都能找到自己的位置,而精准营销也是企业发展的一个方向。东南文化做文创产品,始终坚持三个要素:文化符号、创意设计,以及合适载体——当这三要素找到一个契合点时,产生的产品就是成功的。失之东隅,收之桑榆,文创产品研发仍在艰难探索,但东南文化却已在具有鲜明个性化的主题文化展馆建设上屡有收获,很明显,这也是数字印刷应用的重要方向。
(8)
式中:Z(k)为k时刻的测量值;H为测量系统的参数;V(k)为测量噪声。
格式运用熟练后,三、四可合并,五、六可合并,这样,预习笔记共八项内容;头两项自是简单的,主要是下面六项。
首先利用系统的过程模型来预测系统下一状态,设在k时刻的系统状态为X(k),则可以根据系统模型,由上一状态预测出现在状态,由于我们认为播种机行走的过程是稳定准确的,因此系数A为1;本系统没有控制量,系数B为0:
X(k|k-1)=X(k-1|k-1)。
(9)
式中:X(k|k-1)为k-1时刻的状态对k时刻状态的预测;X(k-1|k-1)为k-1时刻的最优斜率值。
此时系统的状态已经更新,现在需要更新系统的误差估计协方差矩阵:
目前,我国现阶段存有的护理教学内容、课程设置尚不完善、不够合理,循证护理教学并没有纳入高等护理的教学过程中,部分学生对于知识的检索能力、综合素质都不够全面,有待进一步完善;同时,院校采用EBN教学所需要的学时比较多,教学难度也相对较大;除此之外,我国现阶段严重缺乏临床循证护理专家和循证护理骨干人员,在循证护理的实践领域经验几乎空白,因此造成了循证护理的信息资源不够广泛地现状。
P(k|k-1)=P(k-1|k-1)+Q。
(10)
α=|α1-α2|。
通过得到预测结果P(k|k-1),根据得到的现在状态的测量值进行修正,得到最优的估计量:
给予386例患者科学的对症治疗,高血压患者治疗主要用药包括卡托普利、普萘洛尔代文、络活喜、地尔硫卓、珍菊降压、马来酸依那普利片、甲磺酸多沙唑嗪片、硝酸地平缓释片、氯沙坦钾片、复方芦丁片、颉沙坦、拜新同、厄贝沙坦、替米沙坦片等;冠心病患者治疗主要用药包括可达灵、硝酸甘油片、络活喜、通心络、倍他乐克、地高辛、单硝酸异山梨酯片、非洛地平缓释片、脑心通复方丹参滴丸、冠心丹参滴丸、麝香保心丸、养心氏片、曲美他嗪等。
X(k|k)=X(k|k-1)+Kg(k)*(Z(k)-HX(k|k-1))。
(11)
(12)
式中:X(k|k)为k时刻的最优斜率值;Kg(k)为卡尔曼增益。
此时,得出的k时刻的最优斜率值,为了让卡尔曼滤波器不断地进行下去,我们需要更新k时刻的最优斜率值对应的k时刻的最优斜率值对应的误差估计协方差矩阵为
式中:α为参照线在相对坐标系中和X轴夹角与实际终止点连线在相对坐标系中和X轴的夹角的差值,rad。
(13)
式中:P(k|k)为k时刻的最优斜率值对应的误差估计协方差矩阵;I为单位矩阵。
当系统进入k+1时刻时,P(k|k)扮演的角色就是式中P(k-1|k-1)。如此,卡尔曼滤波根据上述的式子,就可以不断迭代下去,得到最终最优斜率值KAB和KAC。
2.3 基于基准路径的自对齐路径模型建立
通过卡尔曼滤波的迭代递推处理,已经得到了基准路径直线AB和直线AC的最优斜率值KAB和KAC。由图2可知,直线AB和直线AC经过原点,因此,其正比例函数为
利用GC-MS对包埋前后的复方精油和微胶囊精油成分,进行成分分析,结果如表9所示。包埋前复方精油相对含量在1%以上的成分有19种,该复方精油的主要成分为乙酸芳樟酯(24.50%)、芳樟醇(18.50%); 包埋后,样品A中的精油主要成分为乙酸芳樟酯(23.56%)、芳樟醇(16.15%); 样品B中的精油主要成分为乙酸芳樟酯(27.60%)、芳樟醇(17.24%); 2种样品精油中的主要成分大致没有变化,包埋比较成功。将2种样品相对于包埋前样品进行对比,样品A中共有4种物质缺失,样品B中共有3种物质缺失,两者的差异性不大。
yAB=KABX;
(14)
yAC=KACX。
(15)
通过北斗卫星定位,可以得到D*点的经纬度,通过式(3)、(5),可以得到D*点的坐标(XD*,YD*),为了小区播种路径对齐,直线ED*需要与直线AB保持平行,因此直线ED*的斜率也为KAB。直线ED*的函数方程为
yED*=KAB(X-XD*)+YD*。
(16)
得到直线ED*的函数方程后,通过计算得到偶数行的播种终止点E,E点是直线ED*与直线AC的交点,通过联立方程
(17)
得到E点坐标
(18)
考虑到播种机完成基础路径的行走时间通常在分钟级别上,远超卡尔曼滤波的正常收敛时间。因此,本文提出的模型实时性可得到保障。
3 结果与分析
3.1 基于算数平均值滤波与卡尔曼滤波相融合的基准路径规划实验结果
为了验证算数平均值滤波与卡尔曼滤波相融合的算法对于基准路径的规划的修正作用,我们选取了山东省德州市平原县的一处实验田。这里的土质与大多数北方地区的土质相同,均为砂土。相较于南方黏性土地而言[21],播种机在行走过程中,出现打滑偏移的问题更为突出,测量值的偏差会更明显。
风影一直离群索居,几乎不与村民们来往,独来独往的他看上去总是一副心事重重的样子。红琴的面孔倒是逐渐丰润起来,那种知足常乐的样子,乍一看根本看不出她过去有什么伤痛的经历与未来有什么美好的梦想。有时候,他会朝山坡上那个迷蒙的地方看,有时候风和日丽,有时候云雾缭绕,他一看就是大半天。红琴见了就开玩笑,和尚,你的灵魂是不是还丢在那间破庙里,如果你还想出家去当和尚,那就尽管去,这回你要是想受戒,就尽管让那老和尚拿香火烫,我绝不拦你。风影有些恼火,但也没有发作,只在心底里骂了一声鬼女子,便悄无声息地走开了。
在实验前,我们首先人为规划出一条基准路径,作为实验过程中的参照线,这条参照线在相对坐标系下的斜率值为3。
通过让播种机沿着参照线行走,实时记录行走过程中的经纬度,并把经纬度通过计算得到斜率值。统计回收的数据,如图3所示,发现与真实斜率值3相比,直接通过经纬度来计算的斜率值,有80%以上产生了10%的偏差;相比于直接计算,使用卡尔曼滤波进行迭代处理大约2 s后,卡尔曼滤波的估计值已经接近真实值,偏差量最大在5%以内。
奇数行同样通过上式得到起始点E的坐标(XE,YE)。这样就完成了小区路径模型的建立。
3.2 基于算数平均值滤波与卡尔曼滤波相融合的基准路径规划实验分析
如果采用两点确定一条直线的方式得到基准路径,那么终止点的位置,实际是无法估计位置的,终止点的位置出现偏移的大小,会直接影响播种机播种的面积偏移。假设真实斜率值为k1,实际斜率值为k2,则斜率对应的夹角α1,α2为
(19)
式中:α1为参照线在相对坐标系中与X轴夹角,rad;α2为A点与终止点连线在相对坐标系中与X轴的夹角,rad。
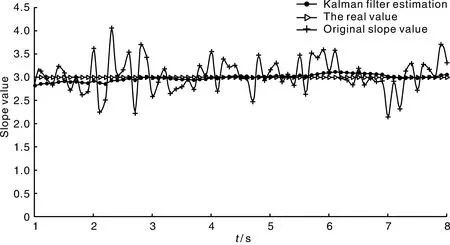
图3 基准路径斜率估计值与观测值
偏移角α为
式中:P(k|k-1)为在k时刻由k-1时刻状态对此状态的预测;P(k-1|k-1)为k-1时刻的最优斜率值对应的误差估计协方差矩阵;Q为系统过程噪声的协方差。
(20)
P(k|k)=(I-Kg(k)*H)*P(k|k-1)。
考虑到真实路径和偏移路径的长度相同为L,因此构成了等腰三角形(图4)。按照等腰三角形的性质,可以得到等腰三角形的高h和底边长z:
状态方程
(21)
z=Lsin(α)。
(22)
式中:h为真实路径和偏移路径构成的等腰三角形的高长,m;z为真实路径和偏移路径构成的等腰三角形的底边长,m;L为真实路径和偏移路径构成的等腰三角形的腰长,m。
偏移面积为:
在总结经验看到成绩的同时,我们也要清醒地看到在抗台救灾中暴露出来的问题,特别是防灾能力建设严重滞后,城市平原蓄洪排涝能力严重不足,应对突发公共安全的能力和组织体系建设仍需加强。温州是一个台风暴雨灾害多发地区,如果不加强水利等基础设施建设,不从根本上提高防洪减灾能力,洪涝台旱灾害的心腹之患就无法根除,就难以保障人民群众的生命财产安全和经济社会又快又好发展。因此,进一步加强水利工作和防洪能力建设既是当前一项十分紧迫的任务,又是一项长远的战略目标。
S=|L2sin(α)cos(α)|。
式中:Sa为应力幅,MPa;S-1为材料疲劳极限,MPa;Sb为强度极限,MPa;Sm为平均应力,MPa。
(23)
式中:S为真实路径和偏移路径构成的等腰三角形的面积,m2;通过得到的偏移面积的计算公式(23),选取了10组实际斜率值和卡尔曼估计值,对其偏移面积进行计算,见表1。
通过对10组数据进行对比发现,斜率的实际计算值与真实值的偏差量,会直接反映到偏移面积上。而偏移面积的产生,会对于小区路径的自对齐模型建立,造成了较大的误差影响,通过引入算数平均值滤波与卡尔曼滤波算法,能有效地对实际计算的斜率值进行修正,最小的修正幅度为20.1%,最大的修正幅度达到4 871.4%,并且由式(23)可知,随着基准路径长度L的增加,偏移面积的修正值将随之增加,卡尔曼滤波的迭代递推处理,效果更为显著。

图4 路径偏移面积示意图
3.3 小区路径自对齐实验结果
为了验证小区路径模型是否对实际小区自对齐播种有所帮助,本文选取了另外一台机械结构相同的播种机,作为参照对象。其控制方式是通过安装在车轮上的编码器进行逻辑控制,这种方式也是目前市面播种机最常用的播种方式。实验方式是两台播种机播种相同的路径,分别放入不同颜色的小麦种子用作小区区分。人为划分出小区位置,作为判断依据。使用这种实验方式,每行20个小区,进行10行作业,共200个小区播种,对每个小区小麦种子的偏移距离进行统计,见表2。
四川工商学院作为四川地区首批本科“教育部ICT产教融合创新基地“项目建设高校之一,在教育部的指导下,依托大型企业—中兴通讯的设备,建成ICT创新基地,并借力中兴通讯委托的教育企业—北京华晟的人力、知识、技术、管理资源,校企共建了中兴通信学院,形成具有开放性、集成性、创新性的育人平台,有着其独特的办学特色和学生管理模式,通过与企业合作,成功地将SMART睿智职业规划体系运用于学生职前教育,把将企业元素与学生管理进行融合创新,让学生提前了解职场,认识职场,体验职场,让学生获得一种对社会和职场的认知。为此,我们做出了一系列探索和实践,解决了学生适应社会的难题。
表1 偏移面积数值统计表
Table1Offset area numerical statistics

序号S/N基准路径长度Referencepathlength/m原始斜率值Originalslopevalue原始偏移面积Theoriginaloffsetarea/m2修正后斜率值Revisedslopevalue修订后偏移面积Therevisedoffsetarea/m2误差修正率Errorcorrectionrate/%13.52.620.2622.980.0122083.324.03.510.3482.990.0074871.434.52.980.0203.010.010100.045.03.210.2363.020.024883.355.52.720.4263.010.0152740.066.03.120.2093.100.17420.176.53.180.3613.090.18595.187.02.102.9983.020.0481998.097.53.280.7263.010.0282492.9108.03.310.8813.050.150486.7
表2 传统播种与小区路径自对齐模型偏差小区统计
Table2Traditional seeding and plot path alignment model deviation plot statistics

%
由于北斗本身的定位误差为3 cm,故偏差小于3 cm以内的误差,可以忽略。由统计结果可以发现,传统播种机出现实际偏差的小区数量相对较多,达到61.5%,且超过5 cm以上的较大偏差小区,达到了38%,这对于实际育种来说,会有比较明显的影响。对比而言,基于北斗的小区路径规划的播种机,出现实际偏差的小区数量明显减少,只有7%,且超过5 cm以上的较大偏差小区只有1%。通过路径规划进行育种,对于小区的路径自对齐,有较为显著的效果。
2.2.1 近期疗效 23例患者均可进行疗效评价,CR0 例 (0%),PR8 例 (34.78%),SD10 例 (43.48%),PD5例(21.74%)。总缓解率(ORR)和疾病控制率(DCR)分别为34.78%和78.26%。
4 结论
本文设计了一种基于北斗卫星定位的小区播种路径自对齐的算法,采用接收到的10 Hz北斗卫星定位信息,来计算得到相对坐标系下的坐标位置,通过坐标位置,来实现对于路径的精准规划,经实验验证,相较于传统播种方式,播种精准度提高了54.5%。通过引入算数平均值滤波与卡尔曼滤波算法,大幅度修正了基准路径的精准度,并且随基准路径长度的增加,修正幅度呈阶梯式增加,确保了小区播种的基准线的准确。经过实验验证,本文提到的方法,对于小区播种的路径自对齐,有着显著的规划作用,并且适用于各类作物的小区播种。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
农业技术与装备(2021年3期)2021-12-01
北京航空航天大学学报(2021年7期)2021-08-13
今日农业(2020年22期)2020-12-14
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
电子制作(2019年23期)2019-02-23
科技资讯(2018年10期)2018-10-26
北京航空航天大学学报(2017年9期)2017-12-18
新课程·中旬(2017年1期)2017-03-27