
基于蓝绿光LED的水下可见光通信技术研究进展
2019-10-25 02:33:36王超凡李韦萍贾俊连
复旦学报(自然科学版) 2019年5期
迟 楠,王超凡,李韦萍,贾俊连
(复旦大学 电磁波信息科学教育部重点实验室,上海 200438)
随着无线通信技术的高速发展,5G时代离我们越来越近,研究者对高速无线通信技术的关注度越来越高.可见光通信(Visible Light Communication, VLC)作为一种新型高速通信方式,激活了带宽达到400THz的空白频谱资源,为光通信与无线通信网络的兼容问题提供了解决方案,因此在国内外通信领域引起了高度关注.可见光通信技术具备许多独特的优势,如安全性好、无电磁污染、保密性高、频谱无需授权等[1-3].
由于传统的无线通信方式很难在水下实现有效通信,可见光通信在水下通信方面的应用成为了全球研究的热点.现有的水下无线通信方式主要分为3种: 水声通信,射频通信和光通信.水声通信可实现数十公里的远距离传输,但由于其可用带宽被限制在20kHz的低频范围内,其传输速率被限制在几十kb/s左右.射频通信可实现速率达到百kb/s的水下通信,但由于其在水下传输时存在趋肤效应,传输距离受到限制,仅适合应用于浅水的近距离通信.
由此可见,水声通信与射频通信无法同时满足高速率、长距离传输的需求[5].而在光通信中,由于蓝绿光的波长位于水的透射窗口,水对蓝绿光的吸收系数小,使得蓝绿光通信可在水下传输相对较远的距离,且可获得较高的传输速率.当前水下可见光通信(Underwater Visible Light Communication, UVLC)主要分为激光通信和基于蓝绿光LED的可见光通信.激光通信功率大,可在水下传输较远的距离,但存在相干闪烁的问题,且实现通信需要精准对准,为实际操作、应用造成困难.基于蓝绿光LED的水下可见光通信使用非相干光,集聚照明与通信功能为一体,且无需严格对准,为“动中通”的实现提供方案.因此,基于蓝绿光LED的水下可见光通信将是未来高速水下通信网络的核心技术之一.表1给出了近年来水下可见光LED通信的部分研究成果.
针对海水中复杂的生态环境,以及可见光器件本身造成的对系统性能的影响,需要先进的软硬件技术对水下可见光通信系统进行优化.本文对基于蓝绿光LED的水下可见光通信的关键技术进行分析与讨论,介绍近年来水下可见光通信的研究进展,并对基于蓝绿光LED的水下可见光通信关键技术进行了阐述,包括高谱效率的先进调制格式,高效数字信号处理的均衡算法,以及最新的基于机器学习的信号处理算法,希望可以为今后的水下可见光通信研究提供一定的参考.

表1 近年来水下可见光LED通信的部分研究成果
1 水下可见光通信关键技术
水下LED可见光通信系统架构如图1所示,系统可分为发射和接收两部分,两者都包括光学和电学部分.在发射端,信号输入UVLC发射模块,发射信号处理模块对电信号进行编码、调制、预均衡等操作,并驱动LED实现电信号转化为光信号.光信号通过蓝绿光在水下环境中进行传输.在另一侧,接收端对光信号进行探测,通过光电二极管将光信号转化为电信号,在接收信号处理模块中进行后均衡、解调、解码等操作,最终完成信号的输出.

图1 水下可见光通信系统架构Fig.1 Schematic diagram of underwater visible light communication system
水下可见光通信现阶段面临的主要挑战是可见光通信系统的器件带宽一般只有50MHz左右,想要在如此窄的带宽范围内实现系统的高速通信,需要先进的调制技术提升系统谱效率,这对调制技术提出了很高的要求.本文针对上述挑战设计了高谱效率的先进调制格式,基于数字信号处理的先进均衡技术,以及最新的基于机器学习的信号处理算法,可一定程度上解决水下可见光通信中遇到的部分实际问题.
本节主要介绍基于蓝绿光的水下可见光通信技术,包括无载波幅度相位(Carrierless Amplitude Phase, CAP)调制,正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM),离散傅里叶扩频正交频分复用(Discrete Fourier Transform Spread OFDM, DFT-S OFDM),离散多音调制(Discrete Multitone Modulation, DMT)等先进调制格式,单载波、多载波和非线性的基于自适应滤波器的均衡算法.
1.1 先进调制技术
尽管可见光通信的波长带宽达到400THz,但LED器件带宽一般只有50MHz左右.要想在如此窄的带宽范围内实现系统的高速通信,就需要对信号进行高谱效率的高阶调制.目前在可见光通信技术中主要运用的高谱效率调制格式有CAP,OFDM,DFT-S OFDM,DMT等,具体介绍如下.
1.1.1 无载波幅度相位调制

图2 CAP系统原理框图Fig.2 Schematic diagram of CAP system
无载波幅度相位调制是正交幅度调制(Quadrature Amplitude Modulation, QAM)的一种变种多维多阶调制技术,其特点是在发射端和接收端分别利用整形滤波器、匹配滤波器,对同向与正交信号进行生成与分离,从而生成的CAP信号在信号频带内没有载波,因此该调制方式被称为无载波调制.传统的光通信中使用的CAP调制是模拟调制,利用复杂的模拟滤波器、混频器和射频源实现,仅可实现有线近距离传输,难以达到高速效果.但随着微电子技术的高速发展,高速率ADC/DAC的出现为光的数字域处理创造可能,CAP调制也可在时域数字域实现.由于现在的蓝绿光LED水下可见光通信系统都采用直调直检的方式,CAP调制无载波的特点恰好适合该系统特性,且由于可见光通信系统对系统非线性十分敏感,CAP调制不会造成系统峰均功率比(Peak-to-Average Power Ratio, PAPR)过高,这一特点也是CAP调制在光通信系统中应用的优势.
图2是CAP系统的原理框图.在发射端,首先对输入的原始数据进行高阶QAM编码,然后对QAM编码产生的复数序列取实部和虚部,分别作为同相分量(I路)和正交分量(Q路).接着对这2路信号按照系数M进行上采样,分别通过整形滤波器,再将滤波器的输出信号相减得到s(t).最后将s(t)经过数模转换器(DAC),得到CAP模拟信号,经过可见光信道传输.在接收端,接收到的信号首先经过模数转换器(ADC)转化为数字信号,对该信号进行重采样后经过2路匹配滤波器,实现I/Q分离.之后再进行下采样,对信号进行后均衡,最终完成对信号的解调恢复原始数据.
1.1.2 正交频分复用
正交频分复用是多载波传输技术的一种,起源于多载波调制(Multi-Carrier Modulation, MCM),既是复用技术,又是调制方案.它利用逆向快速傅里叶变换(Inverse Fast Fourier Transform, IFFT)和傅里叶变换(Fast Fourier Transform, FFT)分别实现信号的调制与解调,系统复杂度低,是应用最广的多载波传输技术.
图3是OFDM系统的原理框图.在发射端,首先对原始数据进行编码(此处为QAM编码),然后数据从串行转换为并行.在进行预均衡之后,IFFT用于生成OFDM信号.接下来添加样本循环前缀(Cyclic Prefix, CP)以减轻符号间干扰(Inter Symbol Interference, ISI),随后进行并串转换.OFDM信号通过DAC变为模拟信号在信道中传输.在接收端,接收到的信号通过ADC变为数字信号,对该信号进行同步和归一化,串行转换为并行,CP移除和FFT处理.接着使用后均衡算法补偿系统失真和信道损伤,然后将信号并串转换后进行解码,恢复原始数据.
1.1.3 离散傅里叶扩频
OFDM系统利用IFFT将频域信号变换到时域,而时域信号是由所有的正交子载波信号叠加而成,若所有子载波同时达到峰值,会导致PAPR过高,这对器件提出了较高的要求.针对这一问题,离散傅里叶扩频的正交频分复用(DFT-S OFDM)被提出,可有效降低系统的PAPR.图4是DFT-S OFDM系统原理框图,其处理流程类似于图3中的OFDM.不同之处在于DFT-S在端的正常OFDM处理之前增加了另一个N点FFT,在接收端相应地进行另一个IFFT变换以进行离线处理.在发射端进行FFT可以有效地避免系统中子载波同时达到峰值,有效降低PAPR.
1.1.4 离散多音调制
由于在光通信中,LED只能进行强度调制,必须利用上变频和下变频将OFDM产生的复数信号转变为实数信号.由于发射端和接收端的时钟不一定完全一致,系统容易产生频偏,OFDM具有的很高的频谱效率使其对频偏十分敏感,系统性能会因频偏而大打折扣.若不产生复数信号,这一问题即可解决,离散多音调制(DMT)即为一种产生时域实数信号的方案.

图3 OFDM系统原理框图Fig.3 Schematic diagram of OFDM system

图4 DFT-S OFDM系统原理框图Fig.4 Schematic diagram of DFT-S OFDM system

图5 DMT系统原理框图Fig.5 Schematic diagram of DMT system
图5是DMT系统的原理框图.原始信号同样首先经过QAM调制,进行串并转换即可得到N点的频域信号.将该N点信号取镜像对称,再经过IFFT变换后即可得到时域的实数信号,这样就免去了变频的步骤.与OFDM系统相同,在时域数据添加CP可减少ISI.通过DAC将信号转变为模拟信号在可见光信道中传输.接收端接收到的信号经过ADC后进行同步、串并转换、CP移除后,对原始有用的数据进行N点FFT变换.对FFT之后的频域信号进行后均衡补偿信道损伤,并串转换后完成信号的解调.
1.2 基于数字信号处理的先进均衡技术
可见光信号经LED发射和水下信道传输后,由光电探测器在接收端接收,并转为电信号.在可见光发射、传输以及接收的过程中,信号中会引入多种损伤,这些损伤根据来源和特点的不同,可分为系统线性损伤和非线性损伤.为了准确恢复出发送端原始信号,研究人员提出并采用了一系列基于数字信号处理的先进均衡技术,即通过物理或统计规律对损伤和失真进行建模,利用时域或频域滤波器针对性地估计信号失真,从而有效实现对系统损伤的补偿.目前,迫零均衡(ZF)[14]、最小均方误差检测算法(MMSE)[15]、恒模算法(CMA)[16]、级联多模算法(CMMA)[17]、改进的级联多模算法(M-CMMA)[18]和基于直接判决最小均方算法(DD-LMS)[19]等线性均衡技术已在VLC系统中广泛应用,有效补偿了信号码间串扰引起的信号失真.通过对VLC系统中的非线性损伤进行建模和分析,研究人员提出并采用时频域联合[20]、无记忆多项式[21]、Volterra-M-CMMA[22]和串行干扰消除技术(SIC)[23]等非线性均衡技术,显著增强了系统抗非线性效应的能力.基于数字信号处理的先进均衡技术均衡效果好、处理速度快、自适应能力强,非常适合应用于追求低成本高速率的可见光通信.
1.2.1 CMA、CMMA和M-CMMA均衡技术
系统线性损伤主要由LED、光电探测器、放大器等系统器件的带宽限制产生,主要表现是可见光信号中存在严重的码间串扰(ISI).为了减少ISI,实现可靠通信,常用的方法是在接收机中连入均衡器,对接收到的信号进行后均衡处理.其中,CMA就是一种经典的线性均衡技术,它于1980年由DN.Godard提出,已在光纤通信系统中被广泛运用[16].该算法不需要依靠训练序列来进行抽头系数的更新,而是通过星座点的判决恒模值来计算均衡器的输出误差,实现线性均衡.CMA均衡器的抽头系数更新和输出表达式如下[16]:
W(m+1)=W(m)+λεy(m)X*(m),
(1)
(2)
其中:X(m)=[x(m),x(m-1),…,x(m-N+1)]T为第m时刻滤波器输入的CAP信号向量;W(m)=[w0(m),w1(m),…,wN-1(m)]T是滤波器抽头系数向量;N为滤波器阶数;λ是滤波器收敛步长.
CMA是根据信号的统计规律提出的,认为信号的幅度统计值恒定,输出误差函数为[16]:
(3)
其中:E|x(m)|2/E|x(m)|为判决恒模值;E(·)为期望值.
以CAP-mQAM调制信号为例,m=4时,该信号恒模值为星座点所在圆半径R,当调制阶数增加,星座点不在同一个圆上时,CMA的误差函数值非零,均衡效果大打折扣.为此,研究人员在CMA基础上设计出适用于高阶星座点均衡的CMMA,与CMA相比,CMMA将多个圆半径数学处理后作为参考恒模值,通过级联多个恒模的方式来计算输出误差.假设信号星座点分布于n个同心圆上,则误差函数表示为[17]:
(4)
其中:
(5)
例如: CMMA计算理想CAP-8QAM星座点误差函数时,先引入参考模值为(R1+R2)/2的圆,此时计算出的误差值非零,而后以级联方式引入另一参考模值为(R3-R1)/2的圆,最终使理想CAP-8QAM信号的误差值降为零.
如图6所示,随着调制阶数的增加,外侧星座点的相邻参考圆之间距离逐渐缩小,外侧星座点在相同噪声影响下,更容易发生混叠,此时判决的准确率下降.而调制信号星座点一般呈方形分布,根据这一特点,陶理等在前人基础上提出了一种改进的级联多模算法(M-CMMA)[18].该算法下滤波器输出误差函数通过星座点的正交坐标作为参考模值来进行计算,将CMMA中单一的误差函数计算扩展到了计算I、Q 2路 正交方向上,无论调制阶数如何增加,相邻星座点间的坐标模值都保持不变,因此,高阶星座点解调时很少出现误判现象,取得了较好的均衡性能.

图6 CMA、CMMA、M-CMMA针对不同星座点的参考模值Fig.6 Reference module values for different constellation points in CMA, CMMA, M-CMMA
1.2.2 迫零均衡(ZF)和最小均方误差检测技术(MMSE)
迫零均衡(ZF)是另一种常用的线性均衡技术,在多载波系统中,取得了良好的均衡效果.该算法的基本思路是将均衡器接收到的信号乘以信道矩阵C的逆矩阵,同时忽略噪声的影响,从而得到原始信号数据.定义X为VLC系统发射信号,Y为均衡器接收到的信号,C为信道矩阵,N为噪声,因此均衡器输出信号为[14]:
=C-1Y=C-1(CX+N)=X+C-1N.
(6)
当信号为复数信号时,不能直接使用C的逆矩阵,而是在ZF准则下使用加权矩阵CZF与接收信号相乘.加权矩阵表达式为:
CZF=(CHC)-1CH.
(7)
则均衡器输出为:
=CZFY=X+(CHC)-1CHN=X+ZF,
(8)
其中CH为自共轭矩阵.
ZF算法虽然简单,但实验中的噪声有时却不可忽略,信道矩阵C更是决定了此算法的均衡性能.为此研究人员改进ZF算法,设计出了MMSE算法,在MMSE算法准则下,加权矩阵表达式为[15]:
(9)
此时均衡器输出为:
(10)

因此,与ZF算法相比,MMSE算法由于考虑了系统噪声的影响,性能上更优.
1.2.3 基于Volterra-M-CMMA的均衡技术
VLC系统中的非线性损伤主要来自于接收机的平方率检测和系统器件的非线性,这将导致接收信号中出现原始信号的平方项、交调项、高阶项或高次谐波等,严重影响系统的可靠性.为解决这一问题,研究人员提出了一种基于Volterra-M-CMMA的非线性均衡技术,其主要思路是: 针对系统的非线性响应,利用Volterra级数对其进行估计和展开,使用高阶乘积项表征信号的非线性,从而估计出系统的非线性响应.基于Volterra级数的滤波器抽头系数需要采用更新算法进行更新,最小均方算法(LMS)[26]、CMMA、M-CMMA等算法均可适用,综合考虑均衡效果和计算复杂度等因素,研究人员采用了M-CMMA来进行抽头系数的更新[22].
p阶的Volterra级数表示系统输入输出信号如下[24-25]:
(11)
其中:x(m)和y(m)分别为第m时刻的输入输出信号;M1,M2,…,Mp表示第p阶的系统记忆长度;wi1,wi1i2,…,wi1,i2,…,ip表示第p阶的Volterra非线性项系数.
图7为2阶Volterra级数与M-CMMA结合后的均衡器框图.由于在可见光通信中常采用平方率检测,所以系统噪声主要为2阶拍频噪声,同时考虑到系统计算复杂度,故采用2阶Volterra级数来进行非线性均衡.当p=2时,系统检测器的输出为:
(12)
其中:y1(m)和y2(m)分别代表1阶的线性输出和2阶非线性输出;M1和M2分别为线性项和2阶项系数;wi1和wi1i2分别为线性项和2阶项的抽头系数.
滤波器的2阶非线性抽头系数更新方程为:
wi1i2_11(m+1)=wi1i2_11(m)+δεIMI·xI(m-i1)xI(m-i2),
(13)
wi1i2_12(m+1)=wi1i2_12(m)+δεIMI·xQ(m-i1)xQ(m-i2),
(14)
wi1i2_21(m+1)=wi1i2_21(m)+δεQMQ·xI(m-i1)xI(m-i2),
(15)
wi1i2_22(m+1)=wi1i2_22(m)+δεQMQ·xQ(m-i1)xQ(m-i2),
(16)
其中MI和MQ表示M-CMMA线性均衡器中的I、Q路符号因子.
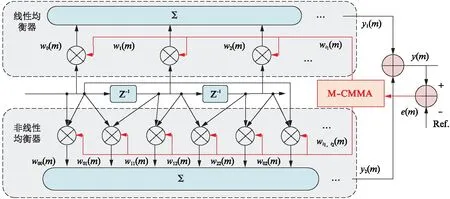
图7 基于Volterra-M-CMMA的非线性均衡器结构图Fig.7 Nonlinear equalizer structure diagram based on Volterra-M-CMMA
这样Volterra级数通过与M-CMMA结合,对于系统的各种非线性失真都具有良好的适应性和均衡效果.王一光等将基于Volterra-M-CMMA的非线性均衡技术,应用于可见光通信系统中,实现了4.5Gb/s CAP64可见光信号的2m室内传输,对比不采用非线性均衡技术的VLC系统,非线性均衡技术可使系统的有效传输距离增加1.1m,2m传输距离处Q值性能提升1.6dB.2018年,本课题组基于Volterra-M-CMMA的非线性均衡技术应用于STBC-VLC系统中,使非成像MISO VLC系统的传输速率从800Mb/s提升到了1.0Gb/s[27].由此可见,基于Volterra-M-CMMA的均衡技术,在不损失系统有效速率的情况下仍能取得较好的均衡效果,在可见光通信应用中极具潜力.
2 基于机器学习的信号处理算法
近几年,机器学习技术也开始被广泛地运用到可见光通信技术中.机器学习算法可以从数据中自主分析而总结规律并进行预测.从传统的有监督学习方法,到随着硬件算力发展而兴起的神经网络,这些技术在可见光通信中只需使用有限的训练样本,便可以极大地提高系统的表现,拥有十分广阔的应用前景.目前,机器学习在可见光通信中的应用主要为4个场景,包括非线性抑制(Nonlinearity Mitigation)、抖动消减(Jitter Mitigation)、调制格式识别(Modulation Format Identification)以及相位估计(Phase Estimation).
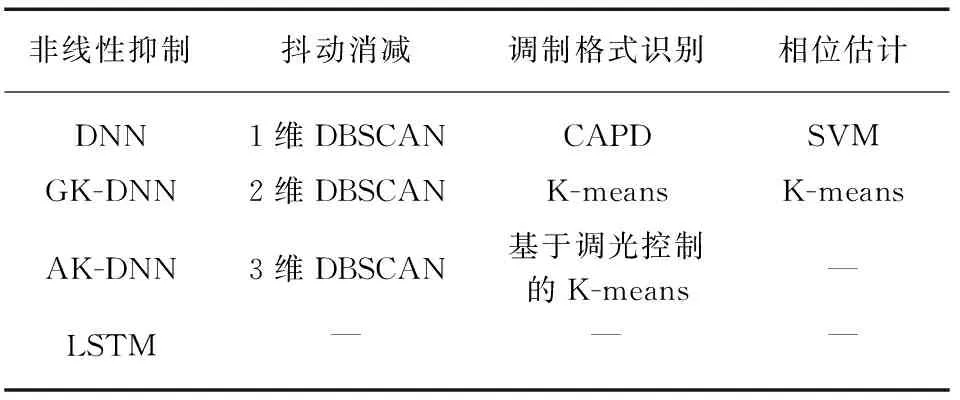
表2 机器学习在VLC中的应用
如表2所示,深度神经网络(Deep Neural Network, DNN)[28]、高斯核深度神经网路(Gaussian Kernel-DNN, GK-DNN)[29]、辅助核深度神经网络(Assist Kernel-DNN, AK-DNN)[30]以及长短期记忆网络(Long Short-Term Memory, LSTM)[31]可以学习并综合出不同的非线性损伤的概率模型,通过补偿系统非线性并量化引入的串扰来实现非线性的抑制;带噪应用的基于密度的空间聚类算法(Density-Based Spatial Clustering of Applications with Noise, DBSCAN)[32-34]可以用于消减可见光通信系统中信号发生抖动的问题;基于感知判决的聚类算法(Clustering Algorithms Perception Decision, CAPD)[35]和K均值聚类算法(K-means)[36-37]可以在可见光通信中强非线性的条件下,实现盲调制格式识别;支持向量机(Support Vector Machine, SVM)[38]和K-means[39]可以估计相位并予以纠正.本部分将主要介绍K-means在调制格式识别中的应用,以及DNN在非线性抑制中的应用.
2.1 基于K-means的调制格式识别
在可见光通信中,系统各部分的非线性会对信号带来很大的影响.以正交幅度调制(QAM)信号为例,强烈的非线性会使接收端所接收到的数据星座点发生严重的I/Q相位及幅度失配,如图8(a)所示.使用传统的欧式距离判决线会导致一部分数据点的误判,如图中所圈出的部分.在此,引入机器学习中的K-means聚类算法作为后均衡器,以欧式距离作为度量标准,将距离比较靠近的点聚为一类,并找到每类的中心作为星座的中心点.以此中心点为标准,使用基于感知判决的聚类算法(CAPD)替代传统的判定边界,即可避免非线性所带来的误判,大幅提升系统的性能[35],如图8(b)所示.

图8 基于K-means的后均衡Fig.8 Post-equalization based on K-means
卢星宇等将该K-means算法应用在多带无载波幅相调制(Multi-CAP)VLC系统中,对系统中I、Q 2路的非线性不均衡损伤分别进行了后均衡,并进行了调制格式识别[35].该文中,作者使用16阶QAM调制,使用了中心频点分别为15MHz、38MHz、61MHz、84MHz和107MHz的5个带宽为20MHz的子带.与纯线性均衡相比,CAPD判决在第1、3、4、5个子带上均将Q值提升了1.6dB到2.5dB;与非线性均衡器Volterra相比,CAPD判决使得误码率下降了10%.
卢星宇等也将该算法应用到了系统的预均衡当中[36].与上述过程所不同的是,在得到星座中心点后,以这些中心点到与之最近的标准星座点的相对位置作为预失真向量,对发射的星座点进行预失真,如图9所示.该文中实验结果表明: 在与上述系统配置相同的系统中,基于K-means的预失真可以将误码率降低到原本的50%到99%,十分有效地抵消了系统的非线性.

图9 基于K-means的预均衡Fig.9 Pre-equalization based on K-means
2.2 基于DNN的非线性抑制
在传统的均衡方法,如递归最小二乘(Recursive Least Squares, RLS)、最小均方(Least Mean Squares, LMS)和级联多模算法(Cascaded Multi-Modulus Algorithm, CMMA)中,系统所带来的非线性损伤均无法被完全补偿.DNN作为一种可以逼近任意非线性的方法,可以有效地抑制系统中的非线性[28].但神经网络对训练样本的数量要求很高,这在实际应用中往往是无法得到的.因此,可以引入基于高斯核函数(Gaussian Kernel, GK)、线性核函数(Linear Kernel, LK)、多项式核函数(Polynomial Kernel, PK)及余弦核函数(Cosine Kernel, CK)等核函数的辅助核函数层,这些辅助核函数能够对训练序列进行预加权,从而有效地加速训练的过程[29-30].

图10 带有辅助核函数的深度神经网络Fig.10 Auxiliary kernel aided deep neural network
一个基于带有辅助核函数的DNN的后均衡器结构如图10所示.整个网络中包含: 一个输入层,一个辅助核函数层,多个隐藏层,一个Softmax层和一个输出层.
迟楠等将级联的DNN-LMS后均衡器应用到CAP64 VLC系统中,进行了数据传输实验[30].该文中,作者使用64阶QAM调制,基于1W的高功率白光LED成功实现了在1.2m的自由空间中2.7Gb/s 的传输,达到了低于7%前向纠错(Forward Error Correction, FEC)极限3.8×10-3的比特误码率(Bit Error Rate, BER).对比单阶段LMS和2阶段LMS,DNN-LMS后均衡器实现了更低的BER.
3 结 语
本文对基于蓝绿光LED的水下可见光通信的关键技术进行分析与讨论.介绍了近年来水下可见光通信的研究进展,并对基于蓝绿光LED的水下可见光通信关键技术进行了阐述,包括高谱效率的先进调制格式,基于数字信号处理的先进均衡技术,以及最新的基于机器学习的信号处理算法,希望可以为未来的水下可见光通信研究提供一定的参考.相信在未来的研究中,基于蓝绿光LED的水下可见光通信将会更快、更远、更稳定,可见光通信技术将会成为未来高速水下通信网络的核心技术之一.
猜你喜欢
——基于上海市长宁区130个样本的研究
园林(2023年12期)2023-12-20 08:59:34
中国农业气象(2023年6期)2023-06-28 12:38:00
童话世界(2018年8期)2018-05-19 01:59:11
健康女性(2017年3期)2017-04-27 21:34:31
儿童故事画报(2016年5期)2017-02-07 20:15:30
都市丽人(2016年12期)2016-12-14 09:54:15
都市丽人(2016年7期)2016-08-03 10:06:05
电子器件(2015年5期)2015-12-29 08:42:39
电源技术(2015年1期)2015-08-22 11:16:14
遥测遥控(2015年5期)2015-04-23 08:16:11
