
全景行车辅助系统在新能源客车上的应用
2019-10-24 02:19李海玲罗高华窦佳欢
客车技术与研究 2019年5期
李海玲, 罗高华, 窦佳欢, 杨 赫, 李 潇
(北京北方华德尼奥普兰客车股份有限公司, 北京 100072)
近年来,几乎所有运营客车倒车系统只依赖于车后顶部的一只小摄像头,其只能覆盖车尾周围有限的区域,而车辆周围和车头的盲区无疑增加了安全驾驶的隐患[1]。为提高行车安全,在客车的前后左右都安装超声波雷达,并融合环视系统的使用就可以让驾驶员清楚地知道障碍物的距离信息以及视觉信息,有效地降低事故发生率。
1 行车辅助系统概述
随着社会的发展,汽车产业也逐渐向智能化方向发展,汽车智能化主要体现在各种辅助系统的应用中。本文讲述的辅助系统由全景环视系统和超声波雷达系统构成。
1.1 全景环视系统介绍
该系统基于图像拼接技术[2],通过安装在车身周围的4个鱼眼摄像头采集周围的环境信息,经过先进的演算合成处理,包括畸变校正、俯视图变换、全景拼接和融合等,最终处理成一幅完整的全景俯视图,并将形成的图像实时传送到中控屏,最终的效果是没有任何的视角盲区[3-4]。同时支持U盘录像功能,可以把4个摄像头采集的资料进行实时记录,这样就将车辆的行驶情况360°无死角地存储下来[5]。
1.2 超声波雷达介绍
为了更好地保证行车安全,除了全景环视系统外,还需融合具有预警功能的高精度汽车超声波雷达辅助行车系统[6-7]。该系统有12个雷达探头,可以实现水平、垂直、斜向全方位的可检测车体与障碍物的距离,雷达的探头距离最远2.5 m,最近0.3 m,有效帮助驾驶员正确判断车体位置,采取正确的行车操作,从而提高行车安全系数[8-9]。
1.3 行车辅助系统集成
该系统通过超声波雷达探测车身与周围障碍物之间的距离和角度,然后再根据全景环视系统的摄像头采集车辆周围的影像,二者将数据融合,最终显示在中控屏上。实现了雷达与摄像头的完美融合,使其成为一个完整可靠的有效整体,并使之能够彼此协调工作,发挥整体效益,达到整体性能最优[10]。
2 实车应用案例
2.1 融合系统设计方案
超声波雷达与摄像头融合的可视系统由4个鱼眼广角高清摄像头、12个超声波雷达、中央控制器及中控屏组成。系统布置图如图1所示。
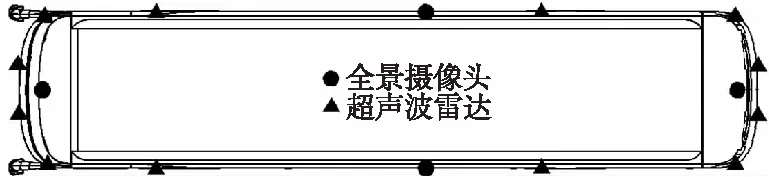
图1 摄像头及雷达布置图
该系统工作原理是:通过对超声波雷达和摄像头进行联合标定,将采集到的信息在控制器中进行分析处理,并通过外部接口与新能源客车进行CAN总线通信,将数据与整车融合。
该系统会将超声波雷达与摄像头联合检测到的障碍物实时地显示在显示屏上,如图2所示。此外,全景环视系统还具有视频存储功能,车辆在发生碰撞时,可以将录像导出并锁定。

图2 效果图
该新能源客车的长度为12 m,为避免走线繁琐,雷达系统分前后2个中央控制器控制雷达探头,即每个控制器连接6个雷达探头。整车的线束连接示意图如图3所示。
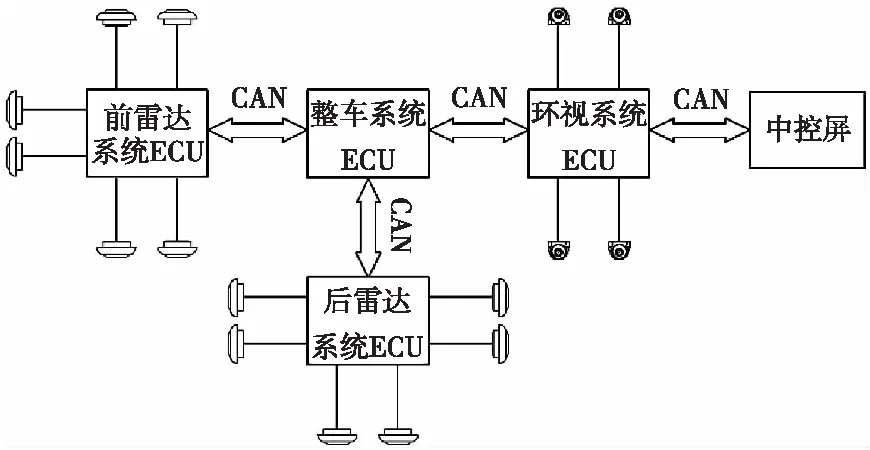
图3 线束连接示意图
2.2 全景环视系统标定
1) 场地选择。场地须大于(车长+4.8 m)×(车宽+4.8 m)。场地要求清洁平整,不要选择在坡地或起伏路面,否则会影响标定效果。场地周围光线良好、均匀。
2) 绘制停车框。用卷尺测量停车框尺寸,并绘制出停车框。停车框尺寸大于车身尺寸20 cm,然后将标定布摆在停车框的4个角,要求每块标定布的其中一个角与停车框的4个角对接,如图4所示。
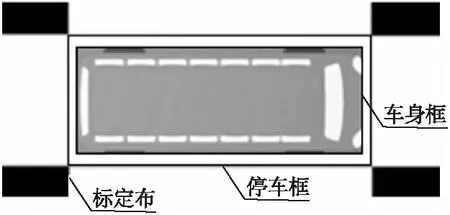
图4 标定布与停车框的摆放位置
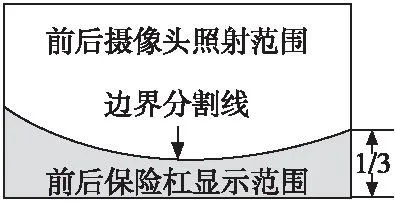
3) 前后摄像头调整。摄像头角度调整到与车身垂直地面的夹角在45°~75°范围内,并保证前后保险杠出现在鱼眼图中1/3区域内,显示效果如图5(a)所示,角度调节完成后锁定摄像头。
4) 左右摄像头调整。摄像头光轴与水平面垂直 (前后旋转0~5°范围内,外侧旋转0~10°内),并保证左右车身出现在鱼眼图中1/2区域以内,显示效果如图5(b)所示,角度调节完成后锁定摄像头。
5) 全景调校。调校之前先在中控屏里输入相关参数,如:模式选择、车宽、车长、摄像头镜像(其中后摄像头输出图像应为镜像)等,然后通过遥控器调整摄像头的8个十字光标对准标定布的8个角,如图6所示。当前后左右4个摄像头完成对准操作之后,按下“OK”键,即进入自动调校,大约3 s后,中控屏显示“调校OK”表明全景调校成功,最后点击“保存”。
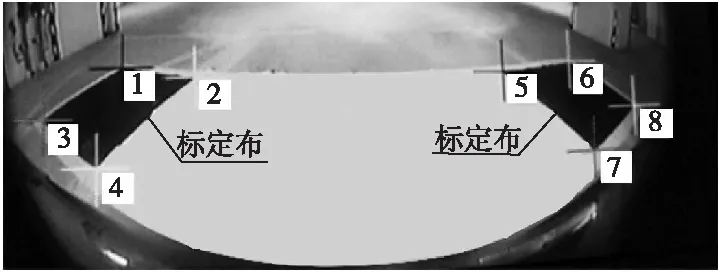
图6 十字光标与标定布对准
2.3 与整车通讯协议制定
通讯协议的制定根据SAE 1939-71协议,采用CAN2.0扩展帧格式,编码格式为Intel格式,通讯波特率为250 kbps。每个报文包括8个字节,每个字节为8位,共64位。
要实现整车系统与行车辅助系统的数据采集和信息通讯,需要在CAN总线上定义各节点的标识符以及数据字节等。整个系统涉及到的数据通信可分为2个ID发送,其中一个ID标识符定义为0x18FEA817,发送方为中控屏,接收方为环视系统,其中每个参数最主要的表现为整车系统发射指令给中控屏,中控屏根据不同的指令进行摄像头的切换。无需切换时发送00,需要切换时发送01,俯视全屏时发送00。具体的数据帧定义见表1。另一个ID标识符定义为0x18FEA717,发送方为雷达系统,接收方为中控屏,其中每个参数最主要的表现为任一雷达检测到障碍物时,将发送最近的检测距离,当车辆周围无障碍物时发送00,有障碍物时发送01。具体的数据帧定义见表2。
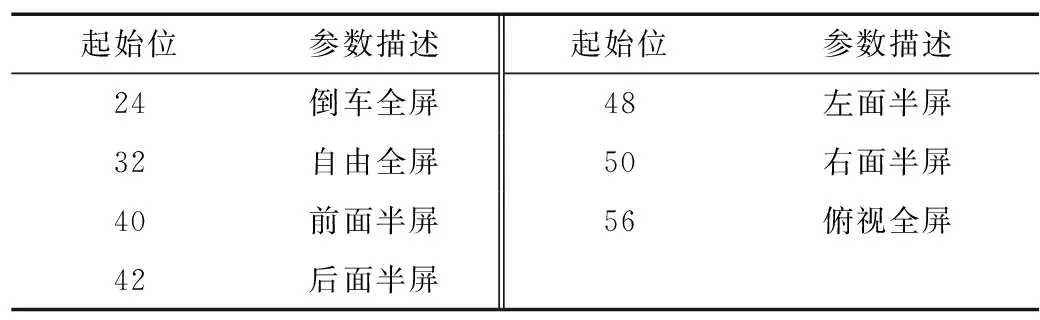
表1 环视系统参数数据帧定义
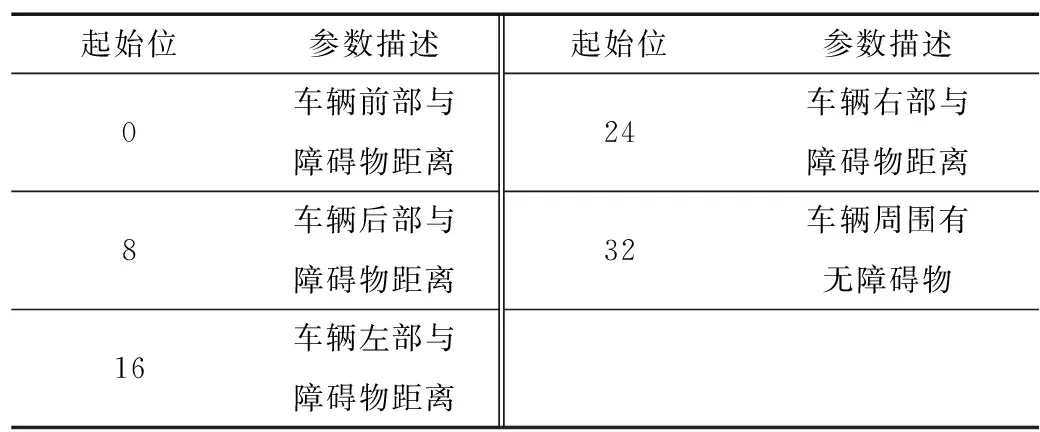
表2 雷达系统参数数据帧定义
3 结束语
近年来,新能源车辆数量的迅猛增长给人们的出行带来了极大便利。然而,车辆的大规模使用也带来了日益严峻的副作用,其中包括频繁的交通事故、拥堵的城市交通以及效率低下的驾驶体验。行车辅助驾驶系统的加入使行车更加安全,更加智能。而且随着车联网的不断进步,汽车的各种辅助驾驶系统会越来越多的应用到汽车上,未来将为人们提供更高质量、更可靠、更安全的服务。
猜你喜欢
汽车电器(2021年8期)2021-08-24
家庭影院技术(2021年7期)2021-08-14
汽车电器(2021年7期)2021-08-04
家庭影院技术(2021年6期)2021-07-28
汽车维修与保养(2020年11期)2020-06-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
好孩子画报(2019年10期)2019-01-10
