
现代高时空分辨率崩岸应急监测技术研究进展与展望
2019-10-23 08:52刘世振樊小涛2冯国正2
长江科学院院报 2019年10期
刘世振,樊小涛2,冯国正2,任 勇
(1.长江水利委员会水文局 河道勘测管理处,武汉 430010;2.长江水利委员会水文局 长江上游水文水资源勘测局,重庆 400020)
1 研究背景
河道崩岸是由土石组成的河岸、湖岸因受水流冲刷,在重力作用下土石失去稳定沿河岸、湖岸的岸坡产生崩落、崩塌和滑坡等现象,是冲积河流河道演变主要表现形式之一。崩岸险情具有隐蔽性、突发性强、危害性大等特点,2017年11月8日,长江扬中河段太平洲指南村附近江段发生较大尺度窝崩,造成岸线坍塌长度达540 m、坍进深度达190 m,应急治理经费达2.2亿元。2017年4月19日,洪湖长江干堤虾子沟发生崩岸,距堤脚最近距离约20 m,但由于发现、抢护较为及时,崩岸险情得到了有效控制,可见若能提前发现险情并及时处理,就能取得事半功倍的效果。因此,在崩岸出险的前后,及时开展崩岸应急监测工作,对岸坡崩塌、冲刷坑异常发育等情况进行及时、准确、高效的监测,以掌握险情下一步发展动态,便于开展崩岸灾害应急处置及抢护工作。然而,这对监测成果的精度、时效性、分辨率均提出了较高的要求,并导致传统观测技术应用受限,因此进一步开展高时空分辨率崩岸应急监测技术的探索及研究十分迫切。黄永健等[1]提出基于护岸工程的位移、孔隙水压力、岸脚水下地形的监测与分析,为崩岸整治工程的稳定性提供判断依据;邓宇等[2]提出水陆地形三维一体化测量及多模态传感器系统在崩岸监测中的应用前景;贺丹等[3]对边坡稳定性监测雷达系统关键技术分析进行了深入分析。本文基于上述研究,进一步总结多个崩岸应急监测技术的构成、特点及应用前景。
2 崩岸应急监测的特点及要求
(1)监测快速。崩岸险情发生后,各种处置方案需在最短的时间内制定出来,这就要求及时掌握崩岸险情及其发展情况,为现场决策和应急抢护提供依据,因此崩岸应急监测应具有极强的时效性,最好能达到“实时化”的要求。
(2)全天候作业。崩岸险情一旦发生,为在最短的时间内遏制险情发展,须不间断地开展除险、抢护工作,这就要求具备全天24 h不间断监测能力。
(3)安全性好。崩岸属于继发性很强的险情。传统崩岸陆上地形观测要求作业人员手持全球导航卫星系统(Global Navigation Satellite System,GNSS)等定位设备在坡顶、岸坡中部及坡脚开展观测,安全难以保障。因此应急监测最好采用遥测的方式,尽量避免观测人员抵近崩岸,从而提高崩岸监测的安全性。
(4)时、空分辨率高。崩岸应急监测需要将不同时段的崩岸数据进行对比,以掌握灾情的发展趋势,需良好的时间分辨率;同时又要求能将冲刷坑形态、土体裂缝等细节准确反映出来,从而为应急抢护提供依据,因此也需有良好的空间分辨率。
3 崩岸应急监测技术构成
崩岸应急监测技术主要针对可能或已经发生险情的崩岸开展快速、精准、实时的监测,并深入感知险情的发展及演变,从而提供宝贵的预警信息并为险情处置提供依据。崩岸应急监测技术主要由船载三维激光及多波束崩岸一体化监测系统、无人机崩岸应急巡查系统、雷达岸坡稳定性监测系统等构成,如图1所示。
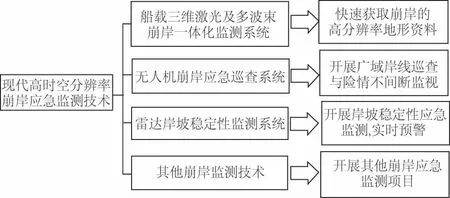
图1 崩岸应急监测技术体系构成
3.1 船载三维激光及多波束崩岸一体化监测系统
崩岸险情应急处理、崩岸整治及崩岸机理研究都需要高精度的崩岸地形作为支撑。近年来,随着多波束、三维激光、导航定位及计算机技术的发展,将三维激光扫描仪及多波束测深系统进行一体化集成,并以测船作为搭载平台,能够快速地获取高精度及高分辨率的崩岸地形,有效监控岸坡坡比变化、冲刷坑发育等情况,同时能够保持在危险区域以外作业,从而具有较好的安全性。
3.1.1 系统构成
监测系统主要包括三维激光扫描仪、多波束测深系统、GNSS、惯性导航系统、全景相机、测量平台、数据采集软件、数据处理软件等。三维激光扫描仪用于采集崩岸陆上地形数据,多波束测深系统用于采集崩岸水下地形数据,GNSS提供位置信息,惯性导航系统提供运动平台的航向、姿态信息,相机用于获取崩岸岸坡影像及色彩信息[4],系统硬件集成及数据传输见图2。
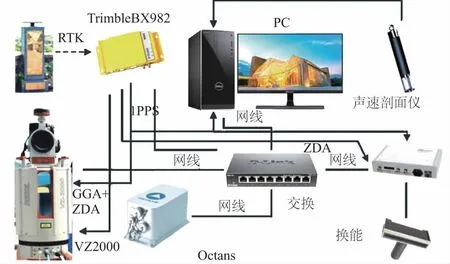
图2 系统硬件集成、数据传输示意图
3.1.2 系统特点
3.1.2.1 平台优势
系统以测船作为平台,续航能力强,能够持续不间断作业,安全性较高,且能为搭载的传感器提供从水面至崩岸方向的良好视野。
3.1.2.2 传感器优势
传感器优势主要表现在如下几个方面:
(1)数据采样率高。该系统改变了传统的“点采样”崩岸观测模式,转而采用点集群或线采样模式,如三维激光扫描仪能够以每秒数千甚至数万点的速度采集崩岸陆上数据(见图3),而多波束测深系统能够在水下与航迹垂直的平面内一次最多能获得上千个水深数据,从而具备较高的作业效率。
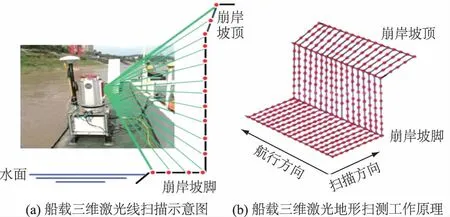
图3 三维激光扫描仪崩岸地形扫测原理
(2)数据分辨率高。三维激光扫描仪能够通过采集的高密度点云数据,再现崩岸的三维空间形态。多波束测深系统也可通过一定宽度的全覆盖水深条带,精确快速地测出沿航线一定宽度范围内水下目标的大小、形状或地形起伏变化,从而准确地描绘出崩岸坡脚及冲刷坑的精细特征,三维地形显示见图4。
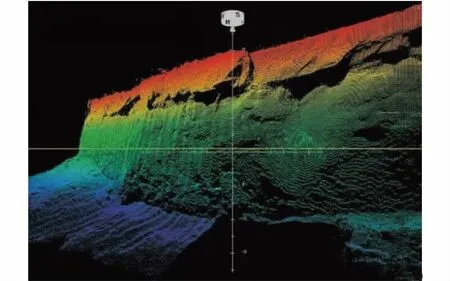
图4 船载三维激光及多波束崩岸一体化监测系统获取的崩岸地形
(3)安全性好。三维激光扫描仪在观测崩岸地形时,只需从船上向崩岸发射激光并接受回波信号即可,从而避免人员抵近岸坡崩塌区域进行观测,提高了作业的安全性。
(4)可全天候作业。三维激光扫描仪是通过接收自身发射扫描激光波束的回波信息来获取被测目标表面的三维坐标信息,夜晚也能正常工作。
3.2 无人机崩岸应急巡查系统
常规的崩岸巡查通常利用测船、快艇、交通车等交通工具,通过目测、图片影像资料记录的方式进行实地查勘,必要时采用GNSS、激光测距枪、卷尺、一维激光流速仪等工具量测崩岸的长度、宽度、面积、裂缝大小及水面流速等要素,是目前较常见的崩岸风险排查手段[5-7]。然而在崩岸应急监测中,需要巡查的岸线河段长,由于险情发展快,需要以更快的速度排查风险点。
3.2.1 系统构成
借助无人机这类平台,通过搭载各类巡查设备,在数据传输及巡查数据处理系统的支持下,集成为无人机崩岸应急巡查系统,充分发挥其机动灵活的起降模式、低空循迹的自主飞行方式及快速响应的多元信息获取能力,从而更契合各类应急崩岸巡查工作。系统构成及原理如图5所示。

图5 无人机崩岸低空巡查系统原理
3.2.2 系统特点
(1)适应能力强。无人机能从空中俯视河道区域的地物、地貌、险工险段等,可以完成河道及堤防险工险段、洪灾区域的地形环境检查,灾害评估等工作。尤其遇到崩岸、溃口等险情,可克服交通不便、人员无法到达等不利因素,及时赶到出险空域,监视险情发展,实时传递现场影像数据,为抢险指挥决策提供依据。
(2)巡查效率高。由于无人机不受地形条件的限制,能够从空中俯视地面,从而具备良好的巡查视角。可事先设置好巡查路线,按照正常速度巡查,一旦发现险情,可降低飞行速度,甚至悬停或盘旋于险情上方,开展连续监视,并通过数传系统将险情影像实时发送到工作站,供险情筛查使用。
(3)设备携带方便、飞行机动灵活、安全可靠。无人机崩岸应急巡查系统机动灵活、可远距离遥控飞往高危区域进行实时探测,有效地弥补了卫星遥感或有人驾驶飞机航空遥感作业的局限和不足。
(4)能夜间监视。无人机崩岸应急巡查系统还可以搭载红外摄像机等夜间观测设备,按照指定的巡查路线进行夜间巡查,从而可实现全天候监视。
3.3 真实孔径雷达岸坡稳定性监测系统
由于崩岸岸坡坍塌突发性强,监测及评估难度大[8-10]。一般情况下岸坡稳定性监测是布设变形监测网来监测岸坡的变化,但是观测耗时长、时效性不好,因此需要一种精度高、实时性强的岸坡稳定性监测系统[11-13]。
3.3.1 系统原理及构成
岸坡稳定性监测系统由真实孔径雷达扫描模块、数字表面模型(Digital Terrain Model,DTM)建立系统、历史数据匹配与对比分析系统、实时监测预警系统等构成。通过真实孔径雷达以近毫米级精度对边坡表面进行分区域、连续、快速的扫描,并建立高精度及分辨率的DTM,并与之前获得的扫描数据比较,从而确定边坡表面的位移程度,当位移量突然增加时,就会发出预警。其监测技术原理见图6,AB为变形区格网单元,lAB为格网边长,θ为变形偏移角度。然而具体的预警位移范围,则是经崩岸区域土体结构分析后得出,并由系统根据以往的边坡位移和崩岸数据对预警范围进行修正。
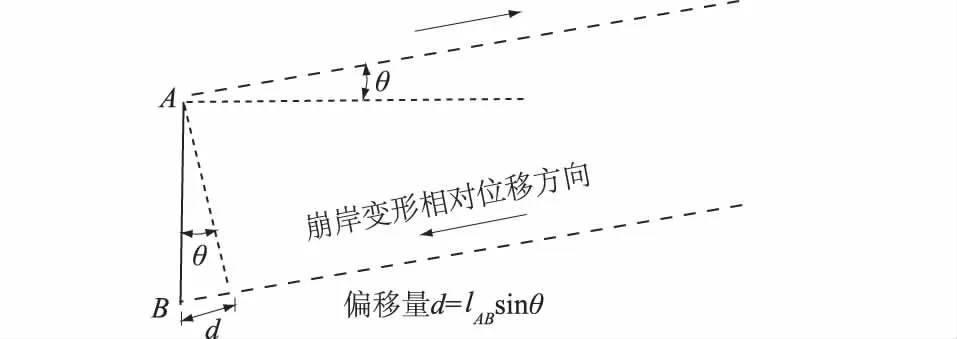
图6 岸坡稳定性监测系统原理
3.3.2 系统特点
(1)监测精度高。系统测量的精度和雷达的波长有直接关联,一般而言,边坡雷达测量的波长一般在15~30 mm之间,当雷达放置位置合适时,雷达监测精度可以达到mm级别。
(2)监测实时性强。系统采用真实孔径雷达扫描技术,雷达信号受反射干扰影响极小,解算技术直接。因此,该系统能在较短的时间(<2 min)内完成解算并可在现场或远程快速得到边坡位移数据(如图7),给出近乎实时的滑动预警,尤其适合在工程抢险施工时实施现场预警,以保证崩岸灾害应急处置及抢护工作的安全。
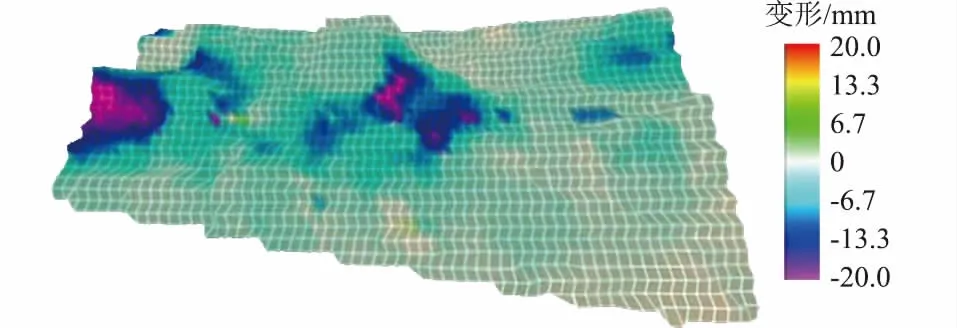
图7 实时的滑坡稳定性监测数据
(3)可计算滑坡体方量。系统可通过精确测定破坏点到雷达中心基点位置后,可以据此推算出崩岸破坏面的坐标,计算出滑坡体的确切位置与滑坡量。
(4)机动灵活,适应性强。系统可以使用汽车及拖车作为载体,简单、快速地进行拖运和部署,受天气影响小。
4 展 望
较常规崩岸观测,崩岸应急监测除了对观测精度、时效性及环境适应性要求高以外,对监测成果的时空分辨率提出了更高的要求。随测绘技术的发展,诸如以船载三维激光及多波束崩岸一体化监测系统、无人机崩岸应急巡查系统及真实孔径雷达岸坡稳定性监测系统等为代表的现代高时空分辨率崩岸应急监测技术将逐渐成熟,从而进一步夯实崩岸应急监测技术体系,也为崩岸灾害的预测、预报做好技术储备。
猜你喜欢
散文诗世界(2021年11期)2021-11-30
成都信息工程大学学报(2021年6期)2021-02-12
冶金设备(2020年2期)2020-12-28
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
红领巾·萌芽(2019年3期)2019-04-18
红领巾·萌芽(2019年2期)2019-04-18
铁道通信信号(2018年10期)2018-12-06
中国资源综合利用(2017年4期)2018-01-22
制造技术与机床(2017年12期)2017-02-02
