
IGM焊接机械手电源模块引起的故障分析
2019-10-21 19:21唐剑华杨永涛
装备维修技术 2019年5期
唐剑华 杨永涛
摘要: 通过对IGM机械手控制原理分析,掌握IGM轴控板错误报警的一般原因以及处理方法。
关键词: IGM焊接机械手轴控板错误;电源模块;总线控制;电源模块;BIOS;总线
引言
IGM公司生产的焊接机械手焊接精度高、动作灵巧、焊缝成形好,在轨道交通行业中得到了广泛应用。我公司于2009年引进了两台IGM焊接机械手(型号分别为RTI370、RTI330S),提高了公司产品质量以及生产效率,在我们的生产中担任着重要的角色。Igm焊接机器人系统由机械手6轴以及外部轴组成,外部轴的数量根据配置不同有所差異。
控制原理分析
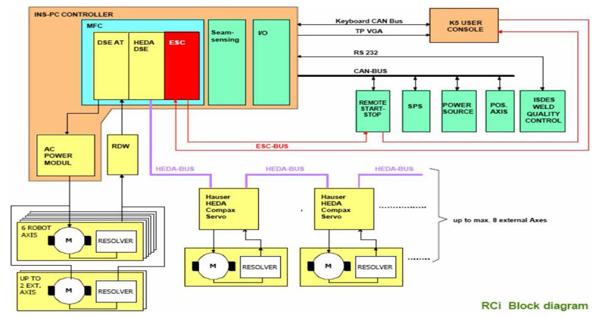
IGM焊接机械手整个系统是采用总线连接,通讯分为6条总线,分别为机器人内部6轴的INTERBUS总线,外部轴通讯的HEDABUS总线、机器人与外围设备通讯的CANBUS总线、控制机器人安全的ESCBUS总线、RS232以及RS422总线,这些总线均由MFC多功能板协调处理。MFC多功能板安装在计算机主板上,内部轴与外部轴控制板叠加安装在MFC多功能板上。ESC板通过ESCBUS总线建立安全检测系统,实时监测与安全回路连接的所有装置。RDW板通过RS232总线与DSE板通讯,为机器人轴的马达编码器供电,并接收位置信息,反馈给DSE板。
其电器原理框图如下:
故障现象和分析
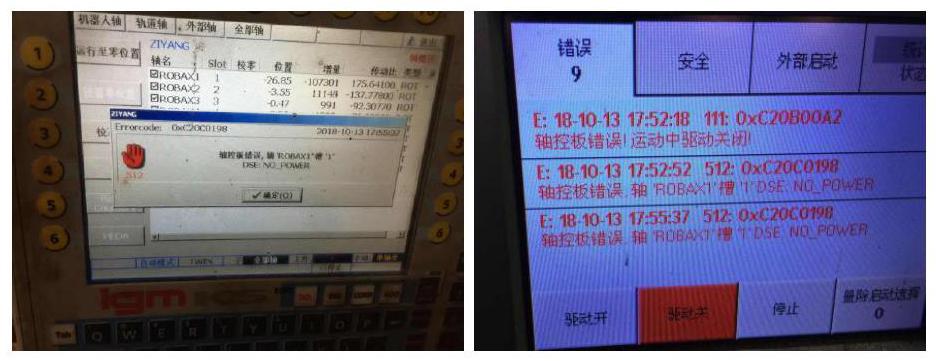
故障现象:IGM焊接机械手启动后,按示教器加载驱动时出现:轴控板错误,轴“ROBAX1槽1,DSE:NO-POWER报警信息提示,驱动加不上。驱动指示灯闪烁,电源模块指示灯正常,无报警。根据上面的控制原理分析以及报警提示分析,该故障主要与直接与其相关的DSE系统、驱动器、RDW板、电机有关以及总线、电缆线有关。
报警图片:
故障处理
由于控制机器人内部轴的INTERBUS总线采用的是串联控制形式,当通讯发生异常时,其故障提示总是从最近的轴报起。另外由于该设备有近段时间一直未使用,加之期间又常下雨,所以一开始便怀疑是内部总线接头因潮湿氧化导致接触不好。经仔细检查,重新拔插,并未发现问题。
接着交换AX1、AX2伺服驱动器(1、2轴驱动器可以直接相互更换,3~6轴驱动器可以相互更换)故障没有转移,故可排除驱动器的故障。
根据前面控制原理分析,MFC多功能板总体对总线进行协调处理,且里面包含有直接控制驱动器的伺服轴卡,本着由易到难,将公司内另一台IGM的多功能板取下进行替换,经开机检查发现故障依旧。故亦可排除总线故障以及数字伺服卡DSE板的故障。
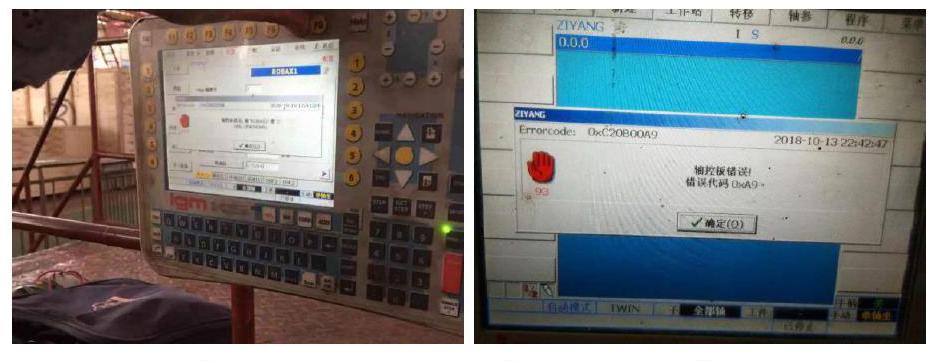
由于系统可以选择性屏蔽轴,于是将1轴屏蔽后,重启观察现象却发现又报,轴“ROBAX2槽2,DSE:UNKNOWN。这进一步排除1轴驱动器故障。接着按照刚才的思路将1、2轴全部屏蔽,重新启机,出现“轴控制板错误!错误代码OXA9”。在这时似乎觉得该报警跟各轴无关,而是跟该轴公共控制部分有关。带着疑问我们继续观察,再将1、2、3轴全部屏蔽掉,重新启动却发现故障好了,驱动可以加上。随即我们关机后重新启动,更奇特的发现不用屏蔽任何轴,设备也可以正常使用,并且来回试机好几次都没问题。但是不料在设备关机一段时间后,启动时又出现同样的报警信息:轴控板错误,轴“ROBAX1槽1。随后又重复刚才的动作,屏蔽轴后,又恢复了正常。后面我们有意识的选择屏蔽不同的轴,却发现只要任意屏蔽3个轴,都能够加载上驱动。
5、 根据前面的试验结论,继续分析电气图纸及电气构成图,发现电源模块KPS600与伺服驱动器存在一定关系。最后更换KPS600电源,故障排除。
总结
在设备故障问题查找过程中要不怕麻烦,有时需要我们反复试验,通过不断的试验,才能更好的锁定故障点,快速找到问题。
不能仅仅依靠报警,有的模块就算出现故障,也没有报警显示,不能因没有出现报警,就排除它故障的可能性。
与故障直接相关的DSE系统、驱动器、RDW板、电机以及总线、电缆线无关系,而是与电源控制有关系。我们在故障排查过程中如果电源模块没有直接出现硬故障,而是出现软故障,往往容易忽略电源模块,而是直接排查与故障点直接相关的控制模块。
猜你喜欢
机电工程技术(2021年3期)2021-09-10
科学家(2021年24期)2021-04-25
电脑爱好者(2020年6期)2020-05-26
电脑爱好者(2019年15期)2019-10-30
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
中国信息化周报(2017年4期)2017-03-23
中小企业管理与科技·下旬刊(2009年8期)2009-12-31
微型计算机(2009年12期)2009-12-21
现代电子技术(2009年14期)2009-09-05
