
基于ARM嵌入式的智能小车控制系统设计研究
2019-10-21 07:21吕纯
河南科技 2019年29期
吕纯

摘 要:人们无法进入恶劣环境长期工作,而智能小车的出现解决了这个难题。智能小车集多种自动化技术于一体,具有很好的可扩展性,实现了高性能、低功耗的功能。本文介绍了智能小车研究现状,分析了智能小车的总体框架,继而构建ARM嵌入式智能小车控制系统的硬件及软件平台。最后通过联合调试,验证智能小车控制系统的可行性与稳定性,从而实现智能小车的远程跟踪和远程监控。
关键词:ARM;嵌入式;智能小车;控制系统
中图分类号:TP23文献标识码:A文章编号:1003-5168(2019)29-0017-04
Design and Research of Intelligent Car Control System
Based on ARM Embedded
LYU Chun
(Wuxi Institute of Communications Technology,Wuxi Jiangsu 214151)
Abstract: People can't enter the harsh environment for a long time, and the emergence of smart cars solves this problem. The smart car integrates multiple automation technologies and has excellent scalability to achieve high performance and low power consumption. This paper introduced the research status of smart cars, analyzed the overall framework of smart cars, and then built the hardware and software platform of ARM embedded smart car control system. Finally, through the joint debugging, the feasibility and stability of the smart car control system were verified, so as to realize the remote tracking and remote monitoring of the smart car.
Keywords: ARM;embedded;smart car;control system
在現代化产业不断进步的今天,各行各业分工明确,行业职业病越来越明显。因此,人们利用智能化的高科技技术,采用某种机器代替高难度、重复、危险的工作,以实现工作自由。智能机器人在军事、工业领域应用广泛,可以更好地帮助人类提高生产效率及生产质量。随着人类活动领域的不断增加,机器人的应用领域正在不断扩大,如海洋开发、空间探测、地质勘探、医疗保健、娱乐服务等。本文所研究的智能小车也属于机器人的范畴。智能小车类似于一个智能微型车,自助驾驶,实时获取图像,并通过无线网络将获取的图像进行传输,远程监控也是其中的一个重要功能。智能小车采用计算机编写的程序控制小车的启动、暂停、方向,不需要人为干预,是典型的高新技术集合体。因此,对该类领域进行研发,对人们未来的工作和生活将会有极大的帮助。
1 智能小车总体框架设计
1.1 层次架构设计
基于ARM嵌入式的智能小车控制系统架构如图1所示。
网络视频监控层需要由PC机与Web视频服务器共同完成,PC机主要由路由器与无线网卡连接而成,视频数据主要通过无线通信模块进行传输。网络视频监控层实现了智能小车在运动过程中的监控[1]。策略应用层是整个架构的重要组成部分,主要是对嵌入式操作系统、驱动程序进行检查。小车的控制层是整个控制系统的关键层;传感器则是智能小车的指示单元,可以实现小车的稳定行驶。小车上的摄像头可以对沿途的信息进行采集,形成图像后通过无线通信模块进行发送。小车机械层是智能小车系统的最底层,同时也是整个控制系统的重要被控制对象[2]。
1.2 软硬件分析
智能小车是在ARM嵌入式操作系统下进行构建的,其构成有硬件、软件以及操作系统。硬件系统主要由ARM9电路板构成;软件部分由驱动程序构成,应用程序通过该接口对硬件设备进行操作,可以让整个系统的软件与硬件测试同时进行;操作系统主要由内核、电路构成[3]。
嵌入式系统以应用程序为核心,软硬件相结合。对嵌入式系统而言,硬件是整个系统的中坚力量,而软件则是整个系统的灵魂,是系统的血液。现今人们所使用的所有嵌入式系统,都需要采用嵌入式软件为系统提供灵活剪裁与特定的制作功能。在进行智能小车设计时,微处理器是整个硬件设计部分的关键,是完成寻迹模块的重要配件,通过摄像头采集路面信息,从而完成与PC机的通信[4]。为了更好地实现系统的实用性,采用RISC结构的微处理器作为整个系统的核心,帮助系统完善更多的功能。
1.3 基于ARM的智能小车整体架构设计
智能小车控制系统整体设计框架如图2所示。
硬件部分由核心板、主控板、驱动板和采集板等多种电路组成。软件部分在Linux操作系统下对系统进行整体把控,以完成对图像的采集,通过嵌入式系统,编写图像采集程序,以实现Boa Web服务器的转移[5]。通过Java平台,它可以实现智能小车采集实时路面情况的功能。
2 智能小车控制系统硬件设计
智能小车硬件平台是整个控制系统的基础,采用模块化设计进行硬件设计,让整个系统可以更方便地安装在智能小车中。智能小车控制系统的硬件平台如图3所示。
2.1 核心板
ARM在智能小车中非常重要,是整个处理器运行的基础,因此在进行构建时,需要让嵌入式处理器运行起来。根据设计需求逐渐添加系统的外部设备,从而实现系统的特定功能。以S3C2440A处理器为核心,将带有该芯片以及其他的核心部件封装在一起,可以达到较强的通用性功能[6]。
2.2 主控板
主控板电路主要根据智能小车的需求,对核心板中各种接口进行连接,并为电路提供电源。
2.3 稳压电源
稳压电源的主要目的是控制智能小车能够稳定运行,为控制器提供可运行能源,也可以控制小车的速度与方向。整个系统采用锂电池进行供电,驱动板与主板之间采用光耦进行连接,随着电量的使用,电压值不断改变,且需要让小车的电压稳定在10.2V,才能够完全满足设计要求。
2.4 寻迹电路
寻迹电路模块直接影响到小车的寻迹运行方向,小車的轨道为黑色轨迹,采用红外光电传感器组件进行检测,红外光传感器是一种光电开关,采用红外光电二极管与高灵敏度组成,信号稳定。这种红外光电管是最常用的一种检测方式,根据不同的材料对光线进行吸收,当红外光线经过白色线时,其处于疏通状态[7]。输出的高低电会介入到ARM中,通过算法进行判断,并输出信号,从而控制小车的速度和方向。
2.5 图像采集
智能小车可以对控制系统中的领域算法进行验证,摄像头可以决定智能算法的工作方式,Linux内核驱动支持多种芯片的摄像头,但这些摄像头的采集效果不一。本系统采用中星微电子公司的ZC0301芯片摄像头,该摄像头可以为系统提供良好的图像处理功能。
3 智能小车控制系统软件设计
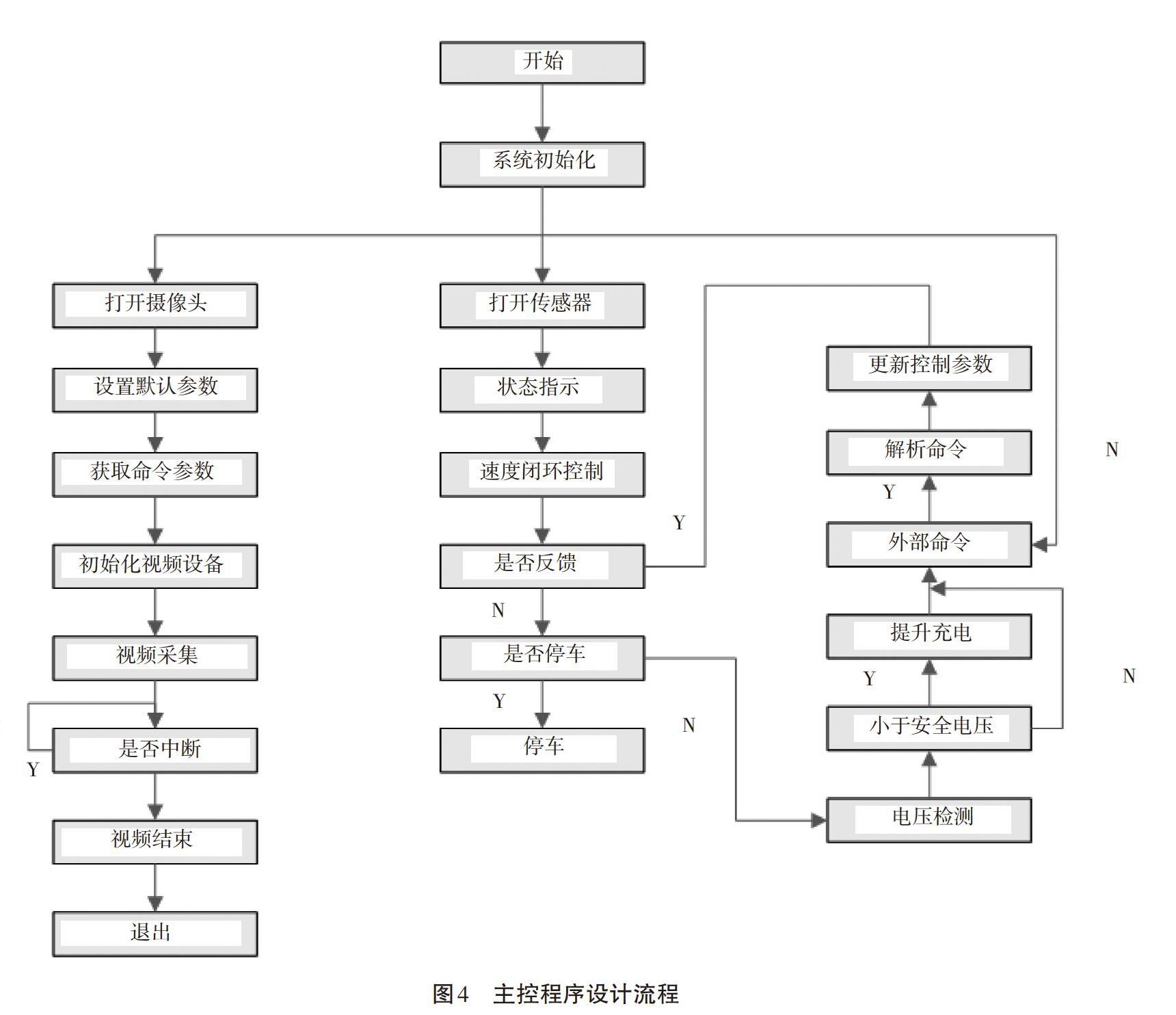
3.1 软件程序总体设计
智能小车的软件程序设计包含了多种应用程序的开发,在Linux系统下,所有的设备都是一个个独立存在的文件[8],设备中的驱动程序将会作为Linux操作系统连接内部与外部的接口,让系统看起来像一个完整的系统。应用程序均采用统一的接口,并向内部接口提出请求,并调用相应的驱动程序,从而完成整个智能小车的软件程序设计。其设计流程如图4所示。
3.2 系统开发原理
设备驱动程序都是在特定的条件下进行编写的,嵌入式Linux设备驱动程序中包含了自动配制初始化、I/O端口、终端服务等功能。驱动程序支持同一类型多个子程序,当调用中断服务时,需要通过设置多个参数来保证设备的唯一性。驱动程序在Linux系统下的位置处于最末端,应用程序层位于最高层[9]。Linux内部封装了设备的驱动程序,内部的程序无法对应用程序进行直接访问,这样做的目的是增加系统的安全性。
3.3 设备驱动设计
当USB接口插入主控板后,需要先初始化USB总线,发送数据请求,由控制器完成数据的接收,并与最底层的硬件进行数据传递与交互。最底层的硬件被USB驱动隐藏,需要由USB设备驱动完成应用层软件的工作。驱动程序的设计如下。
一是图像采集,程序设计如下。
<*>usb SPCA5XX Sonix jpeg Cameras
Multimedia devices --->
USB support --->
二是无线网卡,程序设计如下[10]。
#tar xjvf 2009_0713_RT73_Linux_STA_Drv1.1.0.3.tar.bz2 //解压
cp Module/* /home/linux-2.6.31/drivers/usb/net/rt73 //新建文件夹
config RT73
tristate "support rt73 wireless usb network device"
depends on USB && NET && USB_USBNET//修改
4 仿真测试
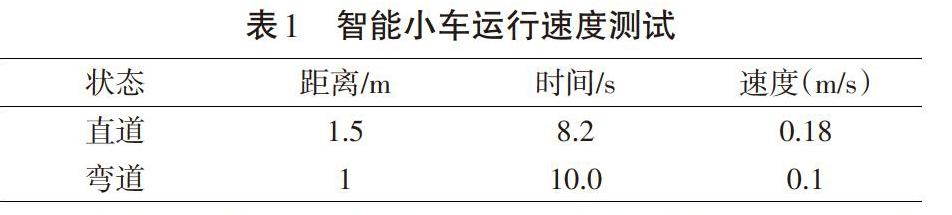
4.1 速度测试
采用卷尺对智能小车的轨迹进行测试,测试结果如表1所示。
4.2 转向测试
采用量角器对智能小车的偏移进行测量,采用卷尺对智能小车的距离进行测量,利用秒表记录小车的所需时间。测试结果如表2所示[12]。
4.3 图像采集测试
无线网卡可以对图像采集进行测试,首先要将采集到的图像保存在电脑目录中,当缓存到一定数量时会自动停止采集[14],所使用的时间大概为30s,表示智能小车控制系统在无线传输的情况下没有出现延迟,画面流畅。
4.4 无线传输距离测试
采用ping命令,测试无线网络传输的速度。例如,ping 221.33.14.23后发送了255个数据包,接收到240个数据包,则丢失率为1.06%。
4.5 视频监控测试
将串口线、网线与电脑相连接,启动终端后加载摄像头模块,并将摄像头模块插入到目标板中。启动服务器后,通过终端将图像的大小设置为640×480[15]。在终端上输入启动命令,打开Java运行下的浏览器,输入IP地址,就可以看到视频监控的画面。
5 结语
基于ARM的智能小车控制系统,是一款高性能、低消耗的智能控制系统,采用ARM9电路板、Linux嵌入式系统作为智能小车控制平台的硬件平台与软件平台,可以实现图像采集处理、无线传输以及视频监控的功能。最后通过试验验证,ARM嵌入式控制系统可以让智能小车完美地实现无线视频监控,从而实现更好的寻迹效果。
参考文献:
[1]侯益坤,侯聪玲,刘益标,等.基于ARM嵌入式的智能小车的控制系统设计[J].机电工程技术,2010(1):21-23.
[2]潘晓贝.基于ARM嵌入式的智能小车的控制系统设计研究[J].时代农机,2018(3):141-142.
[3]贾玉雷.基于嵌入式ARM-Linux的智能车无线监控系统研究[D].兰州:兰州理工大学,2013.
[4]车亚进.基于嵌入系统的智能车辆出入管理系统设计[J].自动化与仪器仪表,2017(4):28-30.
[5]阮文进.基于ARM9的嵌入式智能小车设计与实现[J].中国新通信,2015(22):34-35.
[6]林粤伟,牟森,姜海君.基于ARM和嵌入式Linux的智能小车技术实践[J].计算机系统应用,2018(8):241-246.
[7]申忠宇,郑启文,王川,等.无线通信网络的多智能小车编队控制系统[C]//2013年中国智能自动化学术会议.2013.
[8]基于ARM的升降横移式智能立体车库控制系统设计[D].天津:天津工业大学,2016.
[9]郝常秀.基于嵌入式ARM的电动汽车智能充电系统的设计[J].科技创新导报,2019(6):86-87.
[10]涂钢,高冬冬,尹其畅.嵌入式智能家居控制系统设计与实现[J].物联网技术,2014(11):19-21.
[11]张晓明.基于嵌入式的智能小车设计[J].现代制造技术与装备,2016(6):73-74.
[12]周澄.基于ARM的嵌入式智能仪器系统设计[J].装备制造技术,2013(11):87-88.
[13]潘晓贝.基于ARM嵌入式系统的智能家居系统设计研究[J].江西电力职业技术学院学报,2018(8):15-16.
[14]王苏苏.基于ARM嵌入式智能家居系统的设计与实现[J].无线互联科技,2013(5):77.
[15]于明军,韩铮,王云,等.智能车嵌入式实训系统项目设计[J].实验室科学,2017(4):24-26.
猜你喜欢
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
科教导刊·电子版(2016年26期)2016-11-21
科教导刊(2016年27期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
中国信息化·学术版(2013年4期)2014-01-03
现代电子技术(2009年6期)2009-05-31
计算机教育(2006年3期)2006-03-24
电子设计应用(2004年7期)2004-09-02
