实例探析机载激光雷达技术在工程测量中的应用
2019-10-21 07:46邓清福
科学与信息化 2019年30期
邓清福

摘 要 机载激光雷达技术为空间测量技术,将激光扫描技术、GNSS技术、INS技术、摄影测量技术进行有效融合,通过将其应用于工程测量中,不仅测量效率高,而且可保证测量精度。对此,本文首先对机载激光雷达技术的应用流程进行介绍,然后以某高速公路工程项目为研究对象,对机载激光雷达技术在工程测量中的应用方式进行深入研究。
关键词 机载激光雷达技术;流程;工程测量
引言
现如今,我国交通事业发展迅速,公路工程项目建设数量和规模均不断增加。有些公路工程项目建设区域地形复杂,为保证施工的顺利进行,要求做好施工前勘察设计中的测量工作,为工程项目设计提供可靠依据。传统的地形图分析方式无法准确描绘复杂的地形地势条件,对此,可利用激光探测与测量技术(LiDAR),保证测量精度。因此,对机载激光雷达技术在工程测量中的应用进行深入研究意义重大。
1 机载激光雷达技术概述
1.1 机载LiDAR系统工作流程
在机载激光雷达技术的应用中,在飞行器上可安装LIDAR、GNSS以及IMU,机载LiDAR系统可发射受控激光,当激光照射至测量目标后,即可获得测量目标的三维坐标数据信息,通过利用系统进行数据处理,即可将工程项目测量资料与植被、地表的测量资料相分离,进而获得数字地形模型以及数字表面模型。机载LiDAR系统工作流程如图1所示。
1.2 数据获取流程
LiDAR数据指的是从采集目标体所反射回的激光束信号,在激光束的反射过程中,可能会经过多次翻身,因此,LiDAR会获得大量的数据点。在机载激光雷达技术的应用中,要求利用飞行设备搭载测量系统,因此,需结合实际情况制定完善的飞行方案,选择适宜的飞行平台。在利用机载LiDAR设备进行工程测量以及测量数据信息采集时,应关注系统的各项指标,包括飞行高度、高程精度、扫描方式、扫描角、平面精度等。
1.3 机载LiDAR数据处理
(1)激光数据预处理流程
在利用机载LiDAR获得GNSS数据、摄影数据等各类数据类型后,可对数据进行预处理,进而有效提升数据精度。
(2)激光数据后处理流程
对于LiDAR数据,可采用密集三维坐标,要求对各类数据进行高效分类处理。现如今,对于LiDAR数据,一般采用滤波分类技术,如果利用传统的滤波算法(TIN),则可在此基础上利用信息技术,提升滤波精度和效率。在分离地面点时,可利用三角网滤波算法[1]。
1.4 数据成果制作
数字高程模型(DEM)指的是在测量平面内平面坐标以及高程的数据集,可准确反映出测量范围地貌形态特征。对于测量区域地形地貌,可利用小采样间隔的DEM表达,对于范围较大的测量區域地形地貌,可采用较大采样间隔DEM表达。LiDAR点云数据的密度比较大,对此,可提取出关键点信息形成DEM。通过利用DEM所获得的数据,能够有效满足正射影像制作过程中数字微分纠正,进而有效提升测量精度。
2 某高速公路工程概况
某高速公路线路全长77.2km,线路沿线主要为山区,植被茂密,并且地势地形条件复杂。在高速公路工程项目设计施工前,首先需对勘察设计区域进行线路测量,在本工程项目勘察设计中,综合考虑了实际情况,采用机载激光雷达技术对拟建高速公路沿线进行空中扫描。机载激光雷达技术可穿透植被,并且测量精度高,因此符合工程项目测量要求[2]。
3 机载激光雷达技术实施方案
在本工程测量中,采用载人飞机,并搭载机载激光雷达系统。在航线设计中,为减少误差累积,将整个测量区域划分为4个飞行区,在线路中间位置设置地面基站,可对机载POS数据进行解算。在本工程测量中,飞行2个架次,共15条航线,飞行相对高度1.5km,扫描开角45°,激光点旁向重叠度在50%以上,激光发射频率300KHz,激光发射头扫描频率30Hz,点云密度4点/m2。高速公路测量流程如图2所示[3]。
4 工程测量数据处理
4.1 数据预处理
在应用机载激光雷达技术进行某高速公路测量中,可产生很多数据类型,包括原始点云数据、机载POS数据、GNSS数据以及各类影像数据。在对点云数据进行预处理时,首先需对机载POS数据进行解算,并对点云精度、点云航带匹配等进行检查。在数据处理中,航带间误差处理至关重要,要求必须保证同名点三维坐标的一致性,这样才能够保证数据处理精度。
(1)POS数据解算。在对POS数据进行解算时,采用POSPac商业软件,在数据解算完成后,要求高程精度以及平面精度应分别优于5cm、10cm。
(2)点云航带平差匹配。在航带平差匹配中,可采用束法区域网平差计算方式,要求经过数据处理后,各个架次之间以及架次内的匹配精度应优于10cm。
(3)点云精度检查。在应用机载激光雷达技术前,首先在测量区域地面设置十字地表,采用RTK技术确定三维坐标,然后与激光点云进行比较分析,即可确定激光点云精度。本工程测量精度如表1所示。
4.2 基准转换
在利用机载激光雷达技术进行工程测量时,所获得的数据均可利用WGS84坐标系表示,并利用UTm投影,同时应用大地高系统。在本次工程测量中,采用2000国家大地坐标系、1985国家高程基准,对于WGS 84坐标系中的激光点云,应转换至2000国家大地坐标系、1985国家高程基准中,具体计算公式如下:
在上述公式中,Δx0,ΔY0,ΔZ0分别指的是3个平移参数,另外,εx,εY,εZ分别指的是3个旋转参数,m指的是尺度变化参数。
4.3 点云滤波处理及DEM构建
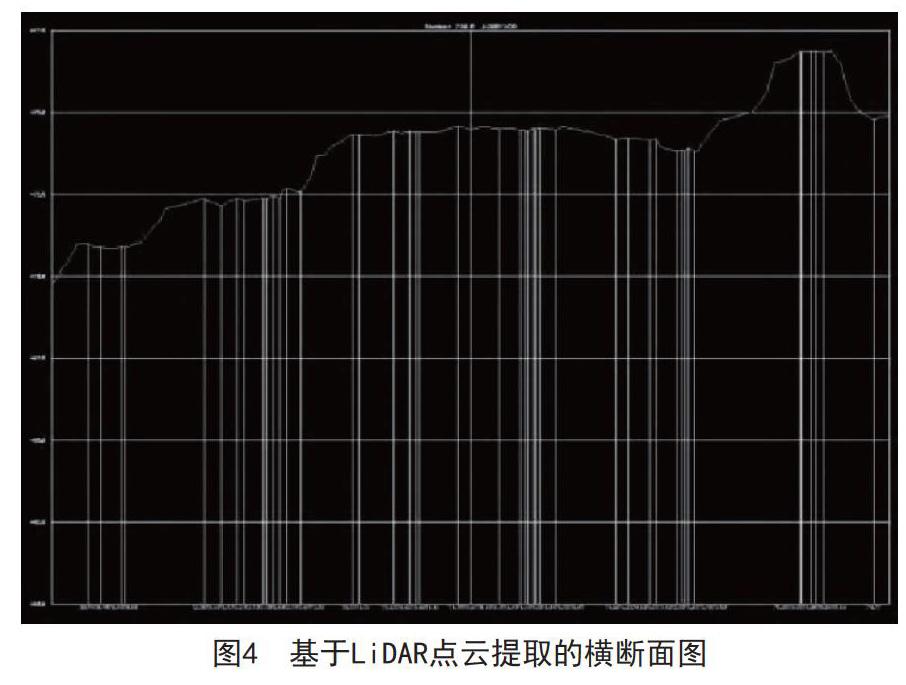
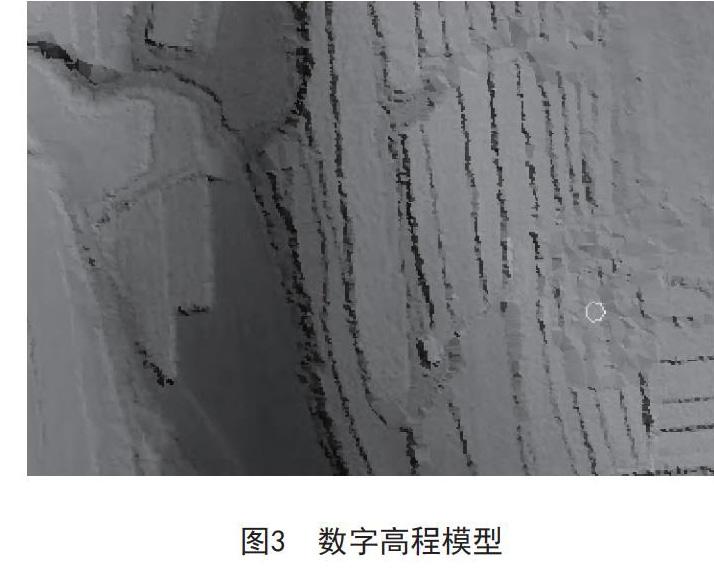
通过应用机载激光雷达技术,能够获得详细的地面三维信息数据,在某高速公路工程设计中,设计人员需将地面点数据作为参考依据,对此,对于点云,需进行滤波处理,保留地面点数据,同时构建DEM,并据此制作DOM、DLG以及纵横断面。在本工程测量中,通过利用点云数据,可制作出数字高程模型,如图3所示。
猜你喜欢
中华养生保健(2022年10期)2022-05-23
ViVi美眉(2019年8期)2019-09-10
高校招生(2017年7期)2017-06-30
广西教育·D版(2016年12期)2017-01-03
中国教育技术装备(2016年19期)2016-12-27
中国新技术新产品(2016年23期)2016-12-26
科学与财富(2016年18期)2016-12-22
客户世界(2013年9期)2013-10-11
AMT前沿论丛(2008年8期)2008-09-08