
基于模糊控制的智能小车轨迹跟踪控制
2019-10-21 07:18张传正,纪旭彬,张丙哲
汽车实用技术 2019年23期
张传正,纪旭彬,张丙哲


摘 要:文章针对一种非完整移动智能小车,以离散轨迹点的方式构建智能小车的预期运动轨迹,并运用模糊控制理论实现智能小车的轨迹跟踪控制,最后利用Matlab软件进行仿真验证。
关键词:智能小车;模糊控制;轨迹跟踪
中图分类号:U461.99 文献标识码:B 文章编号:1671-7988(2019)23-38-03
Trajectory Tracking Control of Intelligent Car Based on Fuzzy Control
Zhang Chuanzheng, Ji Xubin, Zhang Bingzhe
( Changan University, School of Automobile, Shaanxi Xian 710064 )
Abstract: In this paper, for a non-holonomic smart car, the expected trajectory of the smart car is constructed by discrete points, and the fuzzy control theory is used to realize the trajectory tracking control of the smart car. Finally, the Matlab software is used for simulation verification.
Keywords: Intelligent car; Fuzzy control; Trajectory tracking
CLC NO.: U461.99 Document Code: B Article ID: 1671-7988(2019)23-38-03
前言
近几年,随着人工智能的兴起,移动智能机器人作为典型的智能控制对象,成为了国内外高校和科研机构的研究重点,在各个领域内的应用前景也在不断扩大[1]。智能小车,也称轮式机器人,因其构造简单、工作效率高以及控制相对方便,成为了移动智能机器人研究领域的重要分支。而如何实现智能小车的高精度轨迹跟踪,是该领域一直以来的研究热点和难点。
本文针对一种四轮智能小车,对其在平坦路面上行驶时的运动学轨迹进行跟踪控制。
1 智能小车的运动学模型
本文选取笛卡尔坐标系建立智能小车的运动学模型。智能小车有四个轮子,假定小车通过滑移转向进行差速驱动,同侧车轮角速度相同。机器人的运动姿态由笛卡尔坐标中的位置和相对于全局参照系的方位来确定。
图1 笛卡尔坐标系中的智能小车模型
其中,V是平移速度,ω是转动速度,作为智能小车轨迹跟踪的控制输入,( x, y)為智能小车质心的笛卡儿坐标,θ为智能小车行驶方向与x轴的夹角。(x,y,θ)T表示位姿,则智能小车的运动学模型为:
(1)
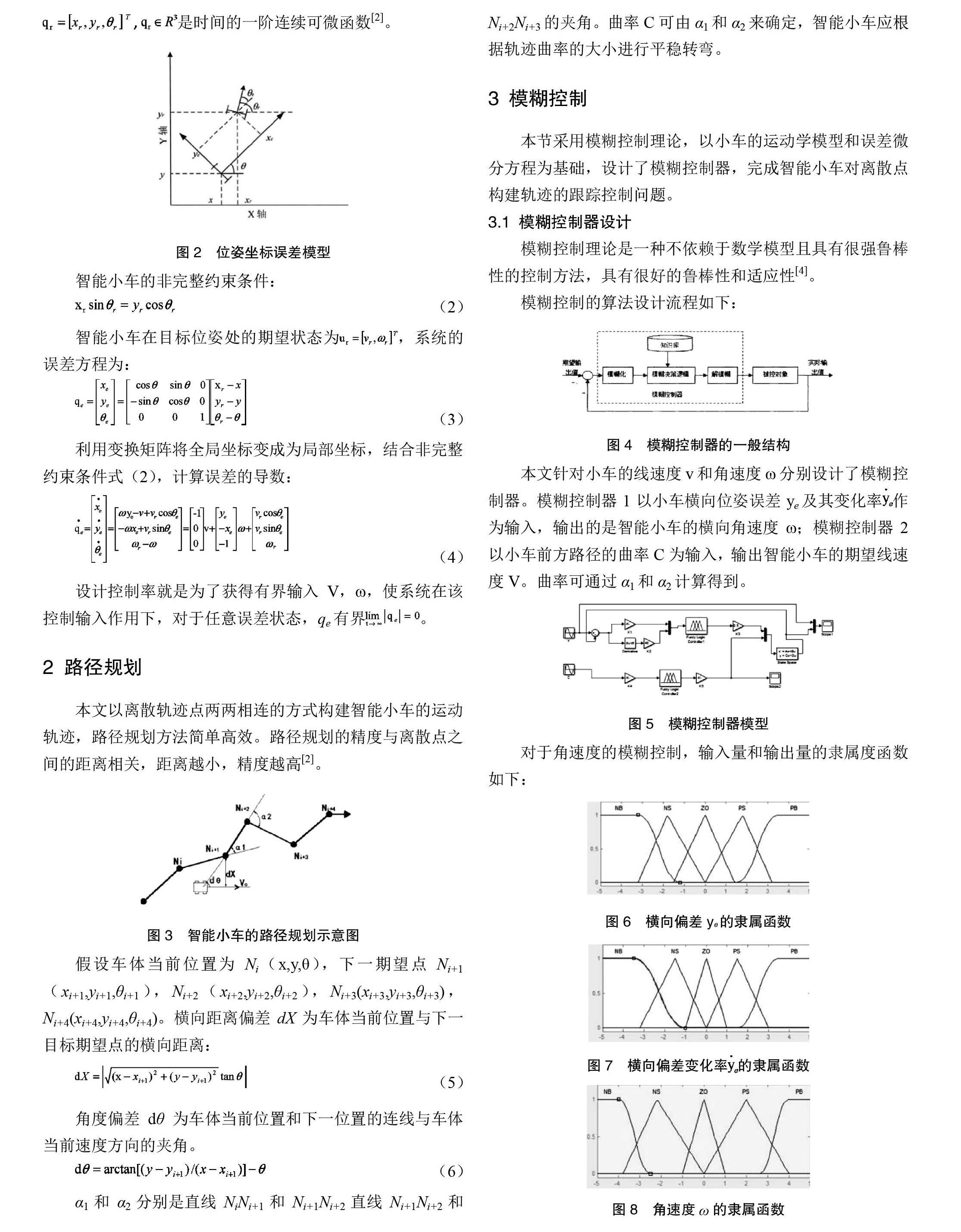
如图2所示,智能小车当前位姿,期望轨迹是时间的一阶连续可微函数[2]。
图2 位姿坐标误差模型
智能小车的非完整约束条件:
(2)
智能小车在目标位姿处的期望状态为,系统的误差方程为:
(3)
利用变换矩阵将全局坐标变成为局部坐标,结合非完整约束条件式(2),计算误差的导数:
(4)
设计控制率就是为了获得有界输入V,ω,使系统在该控制输入作用下,对于任意误差状态,qe有界。
2 路径规划
本文以离散轨迹点两两相连的方式构建智能小车的运动轨迹,路径规划方法简单高效。路径规划的精度与离散点之间的距离相关,距离越小,精度越高[2]。
图3 智能小车的路径规划示意图
假设车体当前位置为Ni(x,y,θ),下一期望点Ni+1(xi+1,yi+1,θi+1),Ni+2(xi+2,yi+2,θi+2),Ni+3(xi+3,yi+3,θi+3),Ni+4(xi+4,yi+4,θi+4)。横向距离偏差dX为车体当前位置与下一目标期望点的横向距离:
(5)
角度偏差dθ为车体当前位置和下一位置的连线与车体当前速度方向的夹角。
(6)
α1和α2分别是直线NiNi+1和Ni+1Ni+2直线Ni+1Ni+2和Ni+2Ni+3的夹角。曲率C可由α1和α2来确定,智能小车应根据轨迹曲率的大小进行平稳转弯。
3 模糊控制
本节采用模糊控制理论,以小车的运动学模型和误差微分方程为基础,设计了模糊控制器,完成智能小车对离散点构建轨迹的跟踪控制问题。
3.1 模糊控制器设计
模糊控制理论是一种不依赖于数学模型且具有很强鲁棒性的控制方法,具有很好的鲁棒性和适应性[4]。
模糊控制的算法设计流程如下:
图4 模糊控制器的一般结构
本文针对小车的线速度v和角速度ω分别设计了模糊控制器。模糊控制器1以小车横向位姿误差ye及其变化率作为输入,输出的是智能小车的横向角速度ω;模糊控制器2以小车前方路径的曲率C为输入,输出智能小车的期望线速度V。曲率可通过α1和α2计算得到。
图5 模糊控制器模型
对于角速度的模糊控制,输入量和输出量的隶属度函数如下:
图6 横向偏差ye的隶属函数
图7 横向偏差变化率的隶属函数
图8 角速度ω的隶属函数
表1 模糊控制器1的模糊控制规则
对于线速度的模糊控制,曲率C和线速度V的隶属函数如下:
图9 线速度V隶属函数
图10 曲率C的隶属函数
表2 模糊控制器2的模糊控制规则
4 仿真分析
给定智能小车的轨迹为正弦轨迹,轨迹的位姿误差初始值。仿真结果如下:
图11 智能小车期望轨迹
图12 智能小车位姿误差曲线
在无外界干扰情况下,智能小车的位姿误差逐渐趋近于零,基本实现了对预期轨迹的跟踪目标[5]。
5 结论
本文针对智能小车的轨迹跟踪问题,以四轮差速转向小车为研究对象,利用模糊控制原理针对智能小车线速度和角速度分别设计了模糊控制器;同时,提出了以离散轨迹点的方式构建智能小车的预期运动轨迹。经过仿真验证,证明了控制算法的有效性,实现了智能小车的轨迹跟踪控制。
参考文献
[1] 杨杰,文利燕,杨蒲,et al.基于滑模控制的多智能小车轨迹跟踪设计[C]// 2018中国自动化大会(CAC2018)论文集.2018.
[2] E.Maalouf,M.saad,H.Saliah. A higher level path tracking controller for a four-wheel differentially steered mobile robot Robotics and Autonomous System,2006,54(1):23-33.
[3] 葛平淑,王荣本,郭烈.基于模糊逻辑的六轮月球车路径跟踪控制[J].吉林:吉林大学学报(工学版):2011.3.
[4] 张松兰.自适应模糊控制器设计[J].盐城:自动化技术与应用:2009.
[5] 李琳辉,连静,王蒙蒙,王文波,吴淑梅.基于滑转补偿的月球车轨迹跟踪控制算法[J].电机与控制学报,2014,18(1).
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
中国新技术新产品(2017年2期)2017-01-20
内蒙古教育·职教版(2016年11期)2017-01-05
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年26期)2016-12-01
科教导刊(2016年27期)2016-11-15
电脑知识与技术(2016年17期)2016-07-23
