
智能照明A类灯杆有限元建模及其力学特性分析
2019-10-21 05:48周戈黄伟
智能城市 2019年19期
周 戈 黄 伟
(1. 武汉地产开发投资集团有限公司,湖北 武汉 430022;2. 防灾减灾湖北省重点实验室 (三峡大学),湖北 宜昌 443002)
由于城市道路空间承载能力有限,各类设施在路灯杆上搭挂的设施日益增多,因此经营设施企业,政府部门、公用事业单位提出了多杆合一的要求。智慧照明灯杆是面向智慧城市,将集照明、视频监控、交通管理、环境监测、无线通信、信息交互、应急求助等多功能于一体的城市共享基础设施杆。这种智慧照明灯杆是城市综合管理上的一个创新,推动我国智能城市的快速发展[1-4]。与普通的路灯比较,其智慧照明灯杆受力状况较为复杂。目前力学计算公式都是简化后的智慧照明灯杆进行研究,具有一定的误差,且不能计算出所有部位的强度与挠度。因此,利用有限元分析方法,构建精细化的灯杆空间有限模型,开展力学特性分析,是保证智慧照明灯杆产品质量的前提。
目前,针对智慧照明灯杆的研究相对较少,正处于不断研究和成熟阶段。文献[5]介绍了通过力学分析方法来验算灯杆强度的模型。文献[6]介绍了高杆灯杆体的设计计算内容、计算工况,对不同型式的灯盘以及不同型式的杆体对灯杆杆体强度与挠度的影响进行了深入比较,提出了杆体壁厚沿杆体高度方向合理布置形式。文献[7]介绍了灯杆设计要求,进行了高杆灯风载荷的设计计算与校核,力学计算结果表明,高杆灯的强度符合要求。文献[8]运用ANSYS有限元软件,对8 m铝合金路灯灯杆结构进行有限元计算,分析路灯灯杆在风载和自重作用下的应力和变形情况。文献[9]借助ABAQUS有限元软件对太阳能路灯进行静响应分析和模态分析,并根据应力云图对应力集中明显的灯杆进行详细分析。文献[10-11]运用ABAQUS有限元软件对10 m太阳能路灯灯杆在风载、雪载以及自身重力作用下各构件的应力与变形进行了分析。在保证灯杆强度与刚度安全的基础上,通过分别改变灯杆和支架的壁厚,对太阳能路灯灯杆进行了改进设计,并得出最优的设计方案。
上述研究为建立智慧照明A类灯杆精细化有限元模型奠定了坚实的基础。本文采用大型通用结构分析软件,分析智慧照明A类灯杆在自重、加载、风载和冰雪载作用下的应力、变形和模态特性;并与理论分析进行对比,验证有限元方法的正确性,其研究结果可供类似智慧照明灯杆的设计和施工参考。
1 A类灯杆有限元模型构建
1.1 工程概况
某城市主干道多杆合一项目智慧照明A类灯杆由主杆、横臂杆、 挑壁灯杆和挑壁杆组成。 主杆上部为异型空心钢管,长度为6 m,主杆下部为立杆八棱柱杆,长度为6.5 m。横壁杆为变截面空心八棱柱杆,长度为11.5 m,主要搭载机动车信号灯;挑壁灯杆为空心圆柱,长度为1.78 m,主要搭载灯具;挑壁杆为空心圆柱,长度为1.5 m,主要搭载球机。杆与杆的连接处,采用焊接和法兰连接方式。
1.2 A类杆几何建模
采用两节点三维线性有限应变梁BEAM188模拟分析。在A类杆三维建模时,由于加载设备结构模型非常复杂,所以,略去对加载设备三维模型的建立,以集中荷载进行加载。另外,A类杆结构要承载的部件不同,其强度和刚度存在差异,故对不同构件设置不同的截面尺寸节约钢材能源,其截面如表1所示。运用ANSYS大型有限元分析软件的APDL语言,建立空间有限元杆系模型,A类灯杆有限元模型如图1所示。

表1 各部件构造尺寸 /mm

图1 A类灯杆有限元模型
1.3 计算参数的确定
在智慧照明A类灯杆分析模型中,模拟了灯杆在荷载作用下的受力情况,模型参数确定如下。
(1) 对杆地面法兰进行固定约束,各部件连接采用刚性连接。A杆整体采用Q235材料,其材料性能参数如表2所示。

表2 普通钢筋材料参数表
(2) 在有限元模型中加载了4种载荷;自重、设备、风荷载和雪荷载。由于A类杆自重影响很大,不可忽略影响,设置材料的重力加速度为9.8 m/s2。对于设备加载,选择交通信号灯、挑壁灯和球机进行搭载。其中,交通信号灯为0.397 kN搭载在横臂杆的中心,挑壁灯0.461 kN搭载在挑壁灯杆的端部,球机0.049 kN搭载在挑壁杆的端部。影响结构冰雪荷载大小的主要因素是当地的地面积雪自重和结构上的积雪分布,冰雪荷载基本雪压应采用50年重现期的雪压。由于挑壁杆和挑壁灯杆横截面积很少,影响不大忽略不计,则雪荷载为0.713 kN均布分布在横臂杆[12]。衡量风的每个节段大小最直接的参数是风荷载,不同的风速作用在多功能灯杆表面引起的风荷载是不同的[13]。将A类杆的每1节视为1个质量单元,共分为5个质量单元。对这些质量单元进行风载荷的计算可以近似得到整个多功能灯杆的风载荷。根据统计该地区50年一遇的10 min平均风速为标准[14],计算出主杆1.5 m处风压0.83 kN/m2、4.75 m处风压1.27 kN/m2、7.5 m处风压1.64 kN/m2、9.5 m处风压1.75 kN/m2、11.5 m处风压1.94 kN/m2。
2 有限元结果分析
2.1 A类杆挠度分析
A类杆的位移云图如图3所示。A类杆在自重、加载设备、风荷载和雪荷载共同作用下,结构产生X方向和Z方向的最大位移能准确判断该杆的刚度特性。
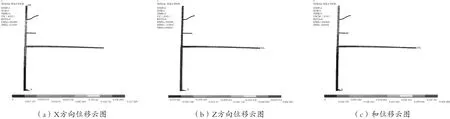
图2 灯杆不同方向位移云图
通过位移云图2a可以看出,X方向最大位移是在主杆的顶端,其大小为157 mm;图2b可以看出,Z方向最大位移是在横臂杆的最前端,其大小为378.05 mm;图2c可以看出和位移最大位移是在横臂杆的最前端,其大小为384.48 mm。智慧照明灯杆的容许挠度为总长度的5%,为575 mm,因而该灯杆有限元挠度结果满足设计要求。
2.2 A类杆强度分析
在A类杆进行有限元强度分析中,为了突出问题本质,工况设置如下:工况1:自重荷载+搭载设备荷载+风荷载;工况2:自重荷载+搭载设备荷载+冰雪荷载;工况3:自重荷载+搭载设备荷载+冰雪荷载+风荷载,具体各工况作用下的应力云图,如图3所示。
由图3可知,A类杆较大的应力主要集中于杆底部法兰处和横臂杆根部法兰,具体位于主杆杆底部迎风面和横臂杆上表面。在工况1、工况2和工况3分别导致的最大应力分别为122、204和204 MPa,可知A类杆出现应力集中破坏主要原因是雪荷载导致。在工况荷载作用下,A类杆除了局部存在应力集应力突增,主杆上部大部分地方的应力值均远小于设置强度,故次杆的上部长方形异型钢管截面建议是4 mm。

图3 灯杆应力云图
2.3 模态分析
结构的固有频率与相应的模态结构形状是设计承受变化荷载条件结构的重要参数。通过模态分析数可以用于结构的动态设计过程,对结构在动力特性满足的条件下进行优化设计。根据A类杆模态分析,杆的主要振型是水平和竖直方向的弯曲振型,本文只提取了结构前五阶振型,求解得到前五阶振型云图如图4所示,固有频率振型分布特点如表3所示。

图4 灯杆前5阶模态振型图

表3 A类杆固有频率与前5阶振型 /Hz
基于A类杆在自重、加载设备、风荷载和雪荷载共同作用下结构产生的模态振型图,展示了各阶振动情况。通过模态分析振型图可以看出,在振动频率为1.342 Hz出现横臂杆一阶横向弯曲和主杆一阶纵向弯曲,在振动频率为1.369 Hz时出现扭动。结构主要是上下和左右弯曲摆动,这种振动形式将会引起设备松动和脱落的安全隐患,振幅太大时,横臂杆会阻挡车辆行驶造成严重交通事故,在运行时应避免激发这种振动模态并适当加强横臂杆的设计刚度。
2.4 与理论计算值比较
为了验证有限元方法的正确性,以工况3荷载参数进行理论计算,分别计算A类杆主要杆件的最大应力。其计算结果如表4所示。

表4 理论计算与有限元分析强度值比较 /MPa
由表4可知,有限元分析结果与理论计算结果基本吻合。这说明有限元建模方法的正确性。有限元建立的模型接近A类杆的实际模型,并且能够计算出该类灯杆各部位的应力分布,具有较强的适用性。通过各部件的比较,出现最大拉应力为211.424 MPa,小于Q235钢材的设计抗弯强度为215 MPa,强度满足设计要求。
3 结语
本文构建了对智慧照明A类灯杆的空间有限元模型,分析了灯杆力学特性,结论如下:
(1) A类杆在荷载作用下位移最大处在横臂杆的最前端,其大小为384.48 mm,出现应力集中破坏主要原因是雪荷载导致,其最大应力为204 MPa;该类灯杆的刚度和强度均满足设计要求;
(2) A类灯杆的基频频率为1.342 Hz,会出现横臂杆一阶横向弯曲和主杆一阶纵向弯曲;二阶频率为1.369 Hz时出现扭动,运行时应避免激发这种振动模态;
(3) 有限元建模方法可以对A类杆进行挠度、强度和模态的分析,其计算精度能够满足工程应用需要。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
工业建筑(2022年2期)2022-06-29
兰州交通大学学报(2022年2期)2022-04-26
昆明医科大学学报(2022年3期)2022-04-19
科技研究·理论版(2021年4期)2021-09-10
科技视界(2021年12期)2021-07-12
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
电子元器件与信息技术(2020年8期)2020-11-12
水电站设计(2020年4期)2020-07-16
特种结构(2019年2期)2019-08-19
