基于CANNY算法的道路交通标线识别方法*
2019-10-18 09:15:24曹晨洁王夏黎赵嘉兴王丽红
网络安全与数据管理 2019年10期
曹晨洁,王夏黎,赵嘉兴,王丽红
(1.长安大学 信息工程学院,陕西 西安 710000; 2.长安大学 智能交通与图像处理实验室,陕西 西安 710000)
0 引言
智能交通系统(Intelligent Transport System,ITS)的研究及其发展中,不管是对车辆行驶的自动控制还是辅助驾驶员的安全驾驶,对于道路标线信息的获取分析以及识别都是一个重要的研究方向[1]。现有的道路地图,虽然可以对车辆驾驶进行道路指引,但无法提供道路上面标线的信息,同时,因为分辨率的限制,无法提供清楚明了的道路图像,因此,快速有效且准确地实现道路标线的识别仍是ITS领域中需解决的难题之一。此外,由于交通标线的类型较多,图像背景复杂,多种不同类型的标线有相似之处,同类型标线的差异很小,道路交通标线识别仍存在很大挑战。因此对道路交通标线的准确识别的研究是很有必要的[2]。
目前使用较多的有关图像识别的算法有FAST算法、SIFT算法、SURF算法、CNN和支持向量机等,通过实验对比,SURF算法的执行速度在视频道路标线识别中较为合适。然而在实际应用中该算法存在车载视频图像纷繁复杂、光照条件不定等问题,对识别结果的准确性造成了很大的影响,对视频的整幅截图进行特征点检测的速度和准确率较低。因此本文提出了先对图片进行颜色模式转换处理,再通过标线颜色及其轮廓信息粗定位标识所在位置后再做分割处理,在此基础上检测SURF特征点并利用基于快速近似最近邻搜索算法进行标线识别,提高在视频中对道路标线特征点识别的速度和准确率。
1 实验平台搭建
首先进行采集处理系统的搭建,基于MFC搭建系统界面如图1所示,包括视频选择及打开模块、截屏显示模块、图片处理显示模块、特征点提取显示模块、匹配模块等,便于实验结果效果的展示和对比。
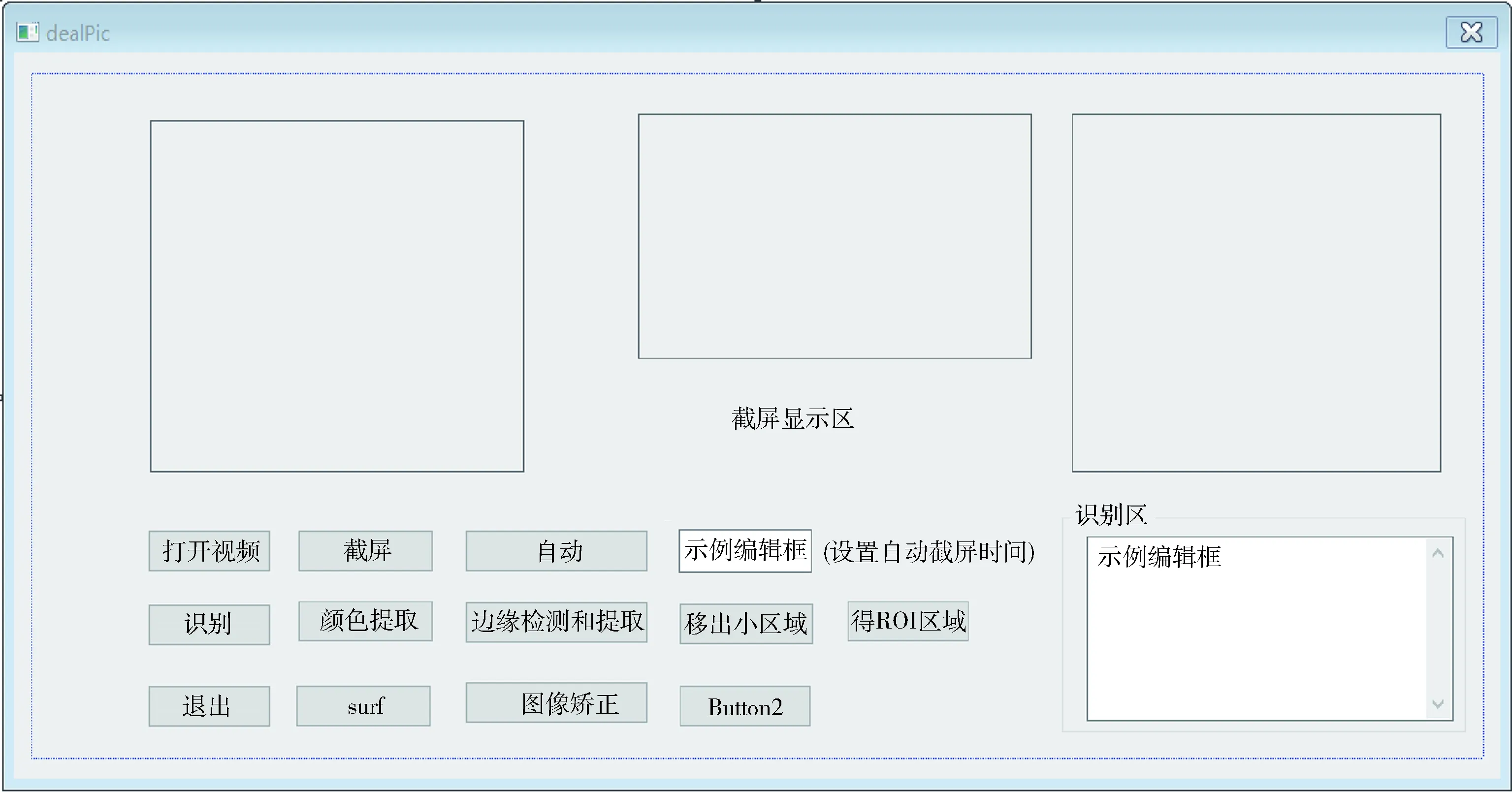
图1 搭建系统界面
考虑对比图像在RGB颜色空间和HSL颜色空间中实现道路交通标线的图像分割处理效果,选取对后期图像分割效果好的颜色空间进行处理。并利用各种分割方法将标线所在图像中的位置进行粗略检测标定,从而确定感兴趣区域ROI[3]。
图像标定完成后,对标定的图像通过对比各种形态学方法(黑帽、顶帽、开运算、闭运算、形态学梯度、腐蚀、膨胀等)选取最优方法进行图像增强处理,提高后期图像分割结果的准确性。
最后进行特征提取及目标识别,在定位分割后的图像中检测SURF特征点后使用快速近似最近邻搜索算法进行匹配。
本研究的处理流程是首先进行图片采集,然后进行图像处理,对处理后的图像进行基于ROI的定位与分割,最后进行图像识别,输出识别结果。处理流程如图2所示。

图2 处理流程
2 图像采集与处理
2.1 图像采集
采用车载摄像头在西安市小寨街区部分街道进行道路交通标线的采集,针对不同的道路交通标线分别进行采集,共采集道路视频5组,选取图像样本150个,采集到的道路交通标线样本如图3所示。
2.2 图像处理
2.2.1 图像颜色模式转换
在图像的采集过程中,由于光照条件的复杂性,会导致道路交通标线提取的颜色失真,光照强弱容易引起对道路交通标志信息识别的偏差,加大识别难度,因此对图像进行颜色转换,来提高图像的颜色识别精度,将图片由GRB彩色模式转换为HSL模式从而削弱光照因素对识别准确率的影响[4]。
HSL的H(hue)分量表示的是人类眼睛可以感知的颜色范围,这些颜色分布在色相环上,取值范围是0°~360°的圆心角,每个角度可以代表一种颜色。HSL的S(saturation)分量代表色彩的饱和度,数值越大,颜色中的灰色越少,颜色越鲜艳[5]。HSL的L(lightness)分量代表色彩的明度,作用是控制色彩的明暗变化。其数值越小,色彩越暗,越接近于黑色;数值越大,色彩越亮,越接近于白色。采用HSL的图像转换能够有效地减弱光照对于图像的影响。
RGB到HSL的转换首先设(r,g,b) 分别是一个颜色的红、绿、蓝坐标,它们的值是在 0~1之间的实数。设max等价于r、g和b中的最大者,设min等于这些值中的最小者。要找到在HSL空间中的(h,s,l) 值,这里的h∈ [0,360)是角度的色相角,而s,l∈ [0,1] 是饱和度和亮度,计算如下:
(1)
(2)
(3)
经过颜色模式转换后得到的道路交通标线图如图4所示。

图4 颜色转换处理图
2.2.2 图像信息提取
通过图像颜色的转换,图像相比于原图像削弱了光照对标线提取的影响,接下来需将图中主要的标线进行提取。本文采用阈值化分割与边缘检测相结合的方法进行提取。
图像阈值化分割是常用的图像分割方法,因其实现简单、计算量小、性能较稳定而成为图像分割中最基本和应用最广泛的分割技术[6]。它特别适用于目标和背景占据不同灰度级范围的图像。基本原理是:通过设定不同的特征阈值,把图像像素点分为若干类。常用的特征有来自原始图像的灰度或彩色特征,本文通过标线的颜色特征设定相应阈值对标线进行分割。
图像的边缘是指图像局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,即从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。图像的边缘部分集中了图像的大部分信息,图像边缘的确定与提取对于整个图像场景的识别与理解是非常重要的,同时也是图像分割所依赖的重要特征。边缘检测主要包括图像的灰度变化的度量、检测和定位。而实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)[7]。
在对传统的几种边缘检测算法进行实验后,选取CANNY算法为本实验的边缘检测方法。CANNY边缘检测是从不同视觉对象中提取有用的结构信息并大大减少要处理的数据量的一种技术。利用CANNY算法检测出被分割出来的标线轮廓信息,为后期图像处理做好铺垫工作。本文实现的CANNY算法中所采用的卷积表达式如下:

(4)
其x向、y向的一阶偏导数矩阵、梯度幅值以及梯度方向的数学表达式分别为:
P[i,j]=(f[i,j+1]-f[i,j]+f[i+1,j+1]-f[i+1,j])/2
(5)
Q[i,j]=(f[i,j]-f[i+1,j]+f[i,j+1]-f[i+1,j+1])/2
(6)
(7)
θ[i,j]=arctan(Q[i,j]/P[i,j])
(8)
根据式(5)~式(8)对梯度幅值进行非极大值抑制,图像梯度幅值矩阵中的元素值越大,图像中该点的梯度值越大,由于图像增强的原因,不能确定该点就是边缘。在CANNY算法中,非极大值抑制是进行边缘检测的重要步骤,其原理图如图5所示,即寻找像素点局部最大值,将非极大值点所对应的灰度值置为0,这样可以剔除掉一大部分非边缘的点[7]。

图5 非极大值抑制原理图
进行非极大值抑制,目的是排除非边缘像素,仅仅保留一些细线条,其工作原理首先要确定像素点C的灰度值在其8值邻域内是否为最大。图5中过点dTmp1和点dTmp2的线条方向为C点的梯度方向,这样就可以确定其局部的最大值分布在这条线上,即除了C点外,梯度方向的交点dTmp1和dTmp2这两个点的值也可能会是局部最大值[8]。CANNY算法中减少假边缘数量的方法是采用双阈值法,本研究阈值选择为20和60,根据高阈值得到一个边缘图像,这样一个图像含有很少的假边缘,但是由于阈值较高,产生的图像边缘可能不闭合,因此采用了另外一个低阈值[9]。高阈值图像中把边缘连接成轮廓,当到达轮廓的端点时,该算法会在断点的8邻域点中寻找满足低阈值的点,再根据此点收集新的边缘,直到整个图像边缘闭合[10]。
使用CANNY算法进行边缘检测会得到如图6所示效果。

图6 边缘检测图
从图6可看到在直行标线内部仍存在着干扰性边缘,车道线边缘也不平滑,因此要进行去噪处理。
在实验中通过对比均值滤波、自适应维纳滤波、中值滤波、小波滤波,以及其他的滤波方法,小波去噪方法保留了大部分包含信号的小波系数,因此可以较好地保持图像细节[11],故本文最终选取小波滤波作为图片去噪的方法。经过上述系列操作得到如图7所示效果。

图7 去噪后边缘检测图
3 结果与分析
对视频中的标线进行识别需要对视频各帧截图做快速处理,因此选取速度较快的算法对特征点进行检测[12]。本文对两种方法进行了实验对比,一种是传统的结合SURF(Speeded Up Robust Features)和快速近似最近邻搜索算法对交通标线进行识别,另一种是改进后的匹配方法,即将图片先进行图像ROI定位再进行识别的方法。
图8为传统的结合SURF的识别方法匹配结果,可以看到,在传统方法中,除了直行标线的特征点被检测到以外,车道线上的特征点也被检测到并被误匹配到标准模块库中的直行标识中。

图8 对整幅图进行匹配
此外,传统方法对整张图片进行处理会影响处理效率,过大的图片传输速度明显小于较小图片的速度[13],这会延长从视频中提取照片再对照片进行处理的时间,因此改进方法只对图像中需要的重点部分进行处理[14]。圈定这个重点区域,以便进行下一步的处理,提高了精度。本文通过包围轮廓的最小矩形边界对原始图像进行分割来实现。将经过上述处理的图片创建出包围轮廓的最小矩形边界并进行截取,得到的效果如图9所示。
图9 分割后效果图
将经过处理、ROI定位及分割的图片继续进行SURF特征点检测,减少了对冗余特征点的检测和描画[15],精确定位分割后的图片更小,加快了对图片特征点的检测速度。实验结果如图10所示。
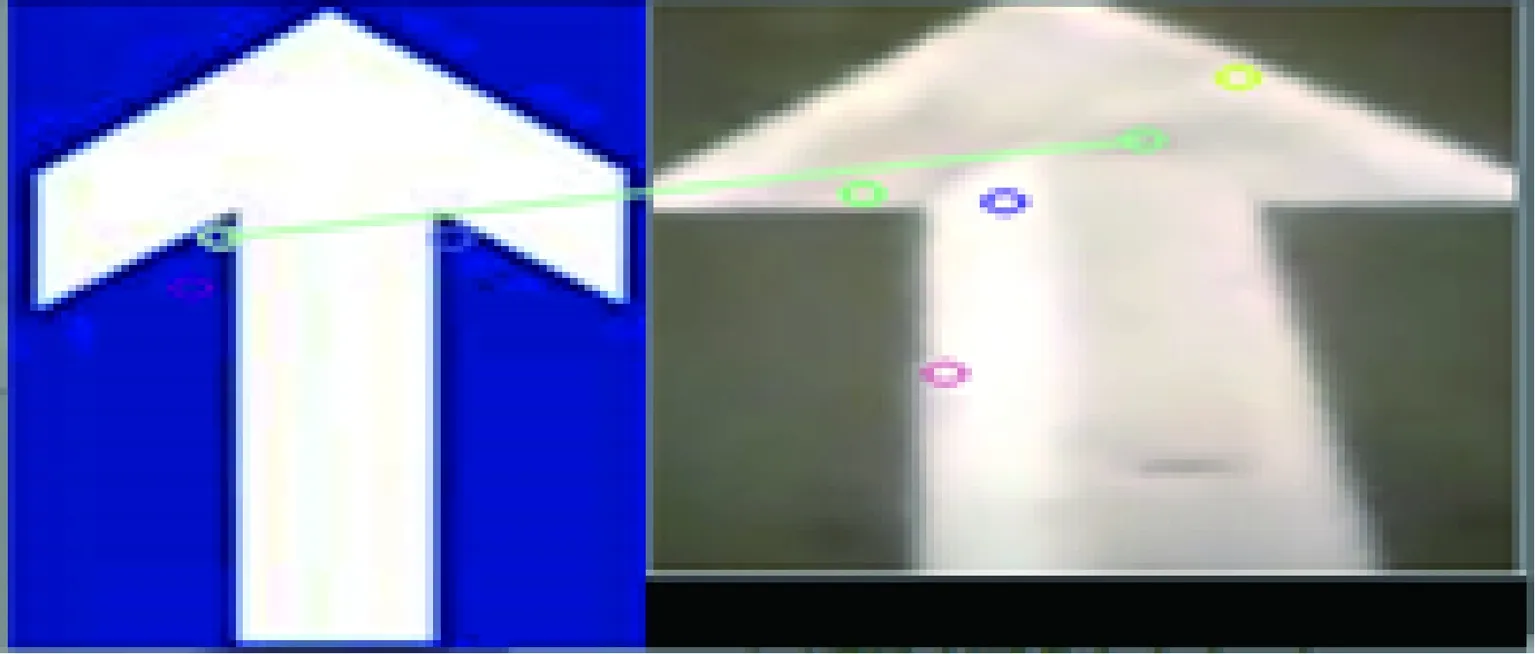
图10 对ROI进行匹配
将150个样本对象通过上述两种方法进行图像处理,得到结果对比如表1所示。

表1 两种识别方法实验对比
由表1可知,本文提出的方法识别率比传统方法高且平均识别时间少,能够快速有效地提取出交通道路标线区域并实现视频中道路标线的检测。
通过实验对比表明,基于CANNY算法提取图像边缘信息对自然道路条件下的标线识别有很好的效果,并有效减少了SURF算法对与目标物无关的特征点的检测,有效提升了后期匹配的正确率;基于ROI定位的标线识别方法相对于直接对整个视频截图进行SURF特征点检测及匹配效果更好、速度更快,更适用于在视频中实现对道路交通标线的检测。
4 结论
在智能驾驶的交通标线识别中,图像的特征提取十分重要,用CANNY算法对图像进行特征提取有效地提高了后期识别效率;此外,对道路上的标线进行定位也很重要,处理整幅图片会影响算法的处理速度,本研究采用了ROI定位的方法,将整幅图片分割开来进行图片的精确处理,这种方法更适用于现实场景中道路环境复杂、干扰物较多的情况,并有效减少了SURF算法对于和目标物无关的特征点检测,有效提升了后期匹配的正确率。通过实验证明,本文方法能够快速有效地提取出交通道路标线区域并实现视频中道路标线的检测,但依然存在问题,比如对特别模糊或周围环境极度复杂下的交通标线不能很好地检测等,设计出实时性好和准确率高的算法是下一步的研究方向。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
中学生数理化·中考版(2021年9期)2021-11-20 06:17:36
高技术通讯(2021年3期)2021-06-09 06:57:48
西南交通大学学报(2018年6期)2018-12-18 02:23:20
上海公路(2018年4期)2018-03-21 05:57:46
中国公路(2017年14期)2017-09-26 11:51:45
自动化学报(2017年5期)2017-05-14 06:20:56
通信产业报(2016年44期)2017-03-13 08:41:45
光学精密工程(2016年1期)2016-11-07 09:01:59
雕塑(1999年2期)1999-06-28 05:01:42