一种模块化深海采样装置的结构设计与分析
2019-10-16 07:16:30柴永生殷守民刘希宽刘宇航张纪磊
烟台大学学报(自然科学与工程版) 2019年4期
李 林,柴永生,殷守民,刘希宽,王 琦,刘宇航,李 岩,张纪磊,2
(1.烟台大学机电汽车工程学院,山东 烟台 264005;2.海军航空大学航空基础学院,山东 烟台 264001)
随着社会经济的不断发展,人们越来越重视海洋和依赖海洋,海洋经济已成为国家国民经济新的增长点.近年来,海洋开发领域由近海向远海、由浅海向深海不断推进[1].因此,提高深海采样工作效率,对我国经济、国防和科研的发展和进步有着至关重要的作用.
由于深海环境存在复杂性和不确定性,因此要求不同的采样任务配备不同的采样工具.然而,目前的深海采样机械手只能配戴一种采样工具.在工作时更换机械手或是更换工具需要将设备拉回水面,这种做法不但造成能源浪费,更会显著降低深海采样的工作效率.因此,寻求一种有效方法来解决此类问题,对提高深海采样工作的效率极为重要.
本文提出了一种模块化深海采样装置,力求最大限度地改进采样工具更换方式,进一步提高深海采样工作的效率.
1 一种模块化深海采样装置的整体结构设计
本文的模块化深海采样装置在满足采样装置共性的基础上,还应满足以下要求:高强度、耐腐蚀、内置化、轻量化.原因如下:
深海环境具有压力高、盐度高、温度低及氧含量丰富等特点,故本文的深海采样装置在材料的选择上,要求具有高的强度和耐腐蚀性.深海沉积物多,且多为软泥和黏土,为避免海底生物的缠绕或沉积物的淤塞,应将电机、电线等全部装置放置于设计的特殊结构内部,以免发生损坏.此外,本装置作业时需搭载自主水下航行器(Autonomous Underwater Vehicle,AUV)系统等载体[2],受此限制,本装置在材料、结构设计、动力装置等方面的选择上,应遵循轻量化原则,以期最大化地降低AUV的能耗.搭载的AUV系统由中国远洋科学考察船“大洋一号”项目特殊研制,其接口可直接与采样装置控制器对接作信息交换,在实际应用中体现出稳定高效且兼容性好等优点.
为保证装置在使用中具有良好的稳定性与可靠性,一种模块化深海采样装置的整体结构如图1所示.主要由机械手和模块化工具库两大部分组成,通过二者配合完成工具的取放工作.装置主要部位的材料均选用316L不锈钢.
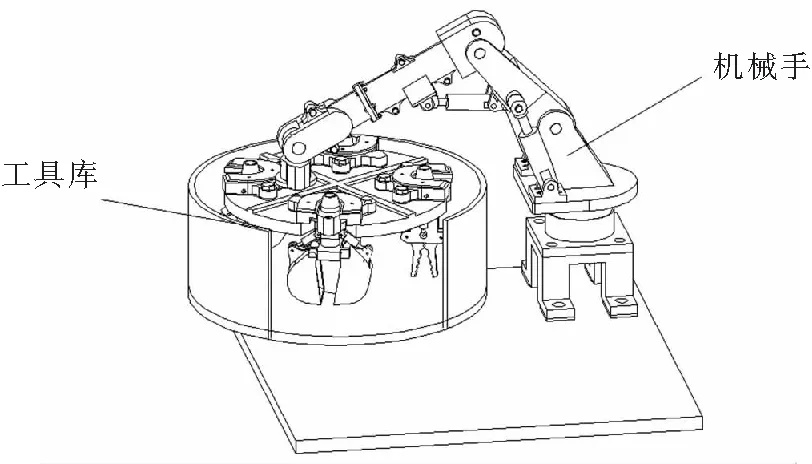
图1 整体结构
模块化深海采样装置的工作过程如图2所示.

图2 模块化深海采样装置的工作流程
2 一种模块化深海采样装置的模块化设计
在采样装置工作过程中,有以下几个关键环节会影响采样工作的精度和稳定性:(1)采样机械手动力源的放置;(2)机械手手部与采样工具匹配的准确性;(3)机械手取、放采样工具过程的平稳性;(4)采样工具处于备用状态时的自锁性.因此,该装置的整体结构采用模块化设计.
采样装置工作时,最关键的环节就是采样工具的取放,该环节会直接影响采样工作的效率、精度及稳定性.在实现采样工具的取放时,需要机械手与工具配合完成以下程序:
(1)工具取出:自锁存在→机械手与工具匹配→自锁解除→工具成功取出;
(2)工具放回:工具进入工具库→自锁存在→机械手与工具解除匹配→工具成功放回.
2.1 模块化工具库
如图3所示,模块化工具库由鼓轮式工具架、箱体以及各类采样工具组成.其中,采样工具包括(a)针对块状物体的三爪齿工具、(b)针对小颗粒物体的贝形爪齿工具、(c)针对慢速移动物体的网状工具、(d)针对杆状物体的夹取爪齿工具.依照采样对象的特征取用不同的工具,能够提高采样的准确性及效率.

图3 模块化工具库结构
工具架置于箱体内,其内部设有信号检测模块,执行采样任务时,依据采样对象特征,总控制系统发出不同的采样信号,工具库接收到采样信号后,工具架旋转,使与采样信号相匹配的采样工具正对箱体缺口部位,与机械手接口完成匹配,二者沿y方向(如图3空间直角坐标系所示)平移离开工具库;采样任务完成后,采样工具由机械手放置回工具架并解除二者接口的匹配关系,采样工具复位.
采样工具置于工具架时的稳定状态需要进行合理的控制,既要保证采样工具易于取出,又要防止工具从工具架上滑落.基于以上分析,设计工具架与采样工具匹配接口,如图4所示,工具架上端面开槽,与工具接口的轴肩相配合;与工具接口相接触的侧面开通孔,安装推拉式直流电磁铁(如图4(a)局部放大图所示);上端盖通过紧固螺栓与工具架固连,其上设置挡板,二者均为“U”型,且上端面沿对称轴各开两通孔放置L销,L销与孔采用过渡配合方式.
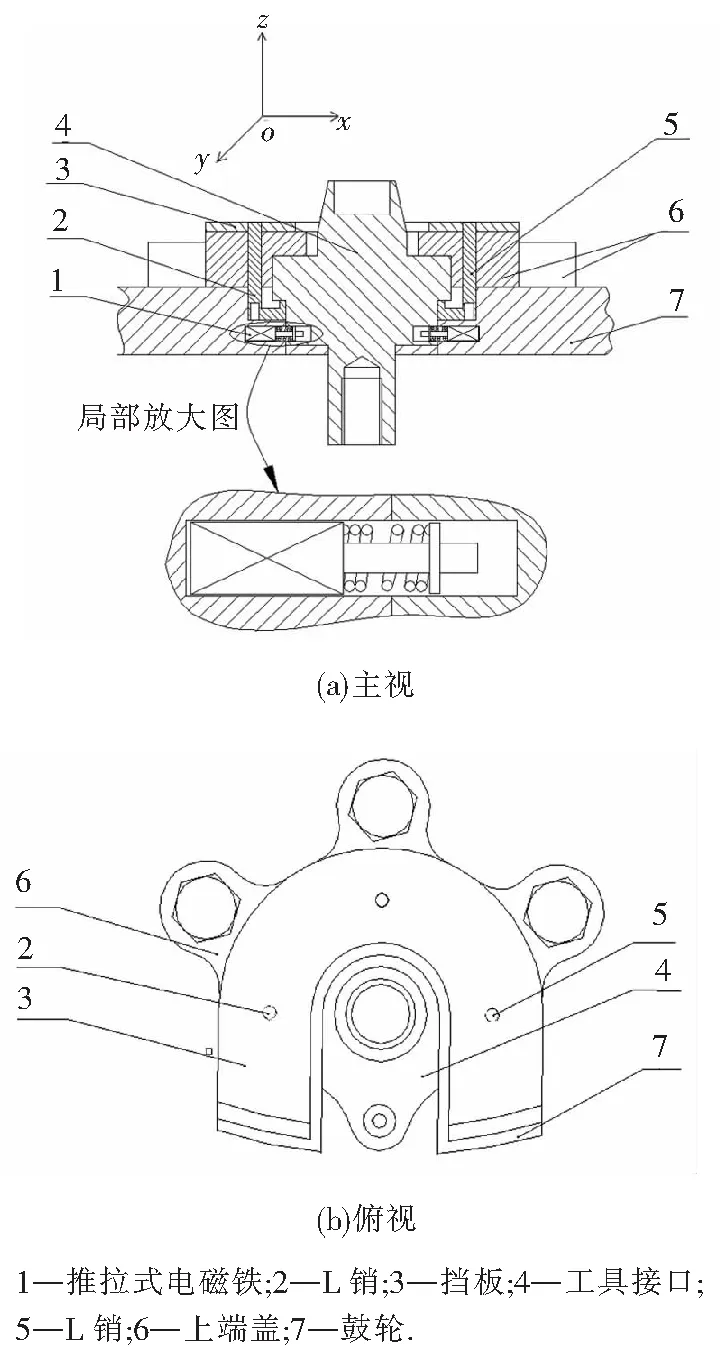
图4 工具架与工具匹配细节
2.2 机械手
机械手作为采样装置的另一核心模块,其作业空间及结构的可靠性,对整个采样装置的功能和作业范围有着极大影响.如图5所示,采用关节式采样机械手,主要由底座、肩部、臂部(4—大臂、5—小臂后端、6—小臂前端)、腕部、手部组成,共有6个自由度.机械手性能指标如表1所示.

图5 机械手基本结构

表1 机械手性能指标
为满足重量轻、动力足的要求,采取液压驱动与电机驱动相结合的方式.机械手工作时,需提供给大臂和小臂足够的动力,故在大臂与肩部相连、大臂与小臂相连的关节处设置液压系统,一方面为大臂和小臂的动作提供动力;另一方面,液压缸与大臂、小臂构成稳定的“三角形”,对大、小臂起到一定的支撑作用;在肩部与底座相连处设置旋转液压缸,带动肩部完成360°旋转;腕部与手部采用电机驱动,由于空间狭小,设计将驱动电机放置于小臂内,以充分利用内部空间,使机械手结构更为紧凑.
由于小臂内既要放置腕部及手部的驱动电机,又要实现回转动作,故设计小臂结构如图6所示,采用圆筒形壳体结构,由小臂前端、连接件和小臂后端组成.小臂前端与连接件头部通过螺栓固连,连接件尾部通过联轴器3与小臂后端内的电机轴固连,并与电机同步旋转,带动小臂前端一同运动,使小臂前端相对小臂后端可完成360°旋转.将小臂沿轴截面切分为两壳体,以方便电机和减速器的取放.

图6 小臂结构
2.3 机械手与工具的匹配接口
机械手与采样工具的匹配,需要依靠机械手手部与工具接口的精确配合实现,选用圆柱形吸盘式电磁铁和液压快速接头实现这一功能.机械手手部下端与工具接口上端均内嵌电磁铁与液压快速接头,并设有局部控制系统.电磁铁提供手部与工具接口匹配的吸合力,液压快速接头将动力经机械手传至采样工具,并实现安全自锁.工作原理如图7.

图7 接口结构
取出工具时,机械手移动至工具上方,使手部下端的电磁铁和液压快速接头与工具接口上端的电磁铁和液压快速接头两两正对接触,电磁铁通电,通过强磁力将机械手与采样工具吸合到一起;放回工具时,机械手将采用工具放入工具架,电磁铁断电,磁力消除,机械手与工具分离,工具复位.
为保证在深海高压环境下系统可靠工作的密封性与耐压性,采用业内常用的外接深海压力补偿器的方式.设备在下降或者上升过程中,压力补偿器自动进行动态调整以补偿压差.设备工作时,水下装置的压力值会始终维持在70~101 kPa,不会影响设备的正常运行.
3 小 结
根据深海作业环境的特殊性和复杂性,本文提出了一种新型模块化深海采样装置,能够满足多种样品的采样需求.
将深海采样工具库的结构进行合理布局,将采集块状、杆状、小颗粒状及慢速移动物的多种功能的工具集成一体,实现多功能性.
根据深海采样特殊性,机械手的结构设计采用动力源内置,满足使用要求的同时减小了重量及空间.
通过对设计机械手与工具接口的合理匹配接口,保证了取、放工具过程的精度和平稳性.
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02 06:33:56
包装与食品机械(2021年5期)2021-11-06 11:40:14
机械工业标准化与质量(2021年8期)2021-10-13 06:44:24
环境技术(2021年4期)2021-09-11 08:26:06
防爆电机(2021年2期)2021-06-09 08:14:38
减速顶与调速技术(2021年3期)2021-03-09 03:15:00
制造技术与机床(2019年12期)2020-01-06 03:17:44
组合机床与自动化加工技术(2019年5期)2019-05-24 03:48:50
载人航天(2016年4期)2016-12-01 06:56:21
综合智慧能源(2014年1期)2014-09-10 07:07:40