
基于拖曳线列阵的深海被动探测研究进展
2019-10-14 08:36:38谢亮林旺生王鲁军
声学与电子工程 2019年3期
谢亮 林旺生 王鲁军
(1.声纳技术重点实验室 第七一五研究所,杭州,310023)
(2.中国船舶重工集团公司电子信息部,北京,100097)
0 引言
目前,我国水声研究以浅海为主,美国的研究则是由深海至浅海。随着近年来国际格局的变化,国内开始关注深远海,并在太平洋、南海等海域开展一系列深远海实验,获得了很多珍贵的数据,针对深海环境条件下的声场特征和声传播规律展开了相关的应用研究[1-2]。由于边界条件、声速剖面、介质不均匀等因素存在显著差异,深海和浅海的声传播特性有明显差别。深海条件下,典型的声速剖面如图1所示,从上而下分别为混合层、温跃层和等温层,在温跃层和等温层之间存在声速最小值,声速最小值对应的位置称为深海声道轴。
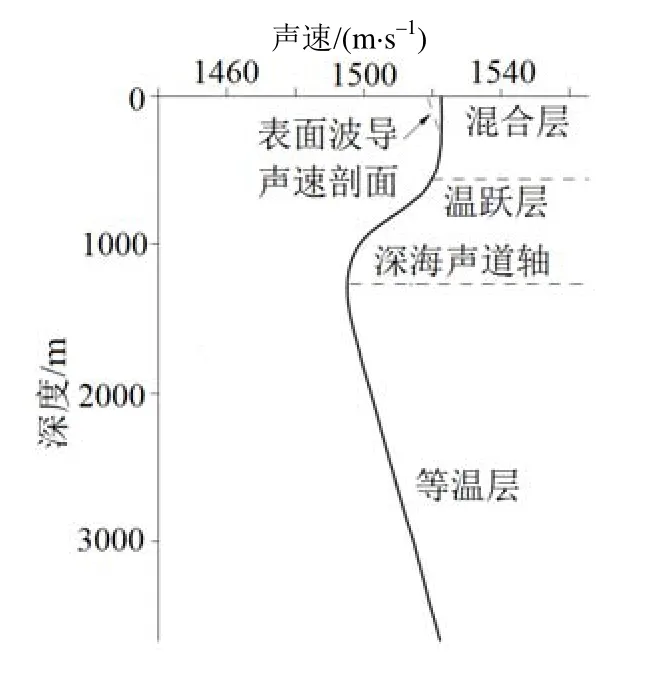
图1 深海环境典型声速剖面
深海传播的主要特征是存在使声线向上折射的声速剖面,这种声速剖面使远程传播得以实现。研究发现,深度大于2 000 m的所有海洋都是典型的深海环境[3],该环境中主要有5种声传播模式:表面波导模式、会聚区模式、海底反射模式、可靠声路径模式、表面波导泄漏模式。图2给出了海洋中不同声传播路径。
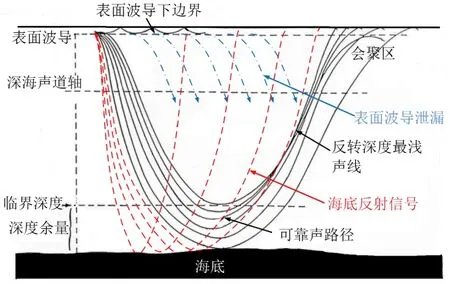
图2 海洋中各种声路径示意图
拖曳线列阵声呐因其阵缆长达几百米,远离拖曳平台,具有较安静的背景和较高的增益,已经成为主要的海洋探测装备[4]。随着波束形成等技术的不断发展和成熟,多基元水听器阵列被越来越多地应用,并且已经开展了一系列应用研究[5-6],在理论和实际应用上都有了进一步发展。本文重点分析在典型深海环境条件下各种声传播模式的声场特征,综述了不同声场特征下相应的探测方法,并讨论这些方法的优缺点,最后指出拖曳线列阵未来在深海中应用的技术发展方向。
1 直达声区及探测方法
深海环境中,直达路径声线在直达声区起主要贡献,直达声线的作用距离较近(大约几千米),到达角通常较小。对于低频信号,由于海底反射损失较小,海底反射路径声线也会在直达声区起作用,而且到达角通常较大。当海洋表面存在混合层时,由于混合层内温度相等,随着深度增加,声速剖面为微弱正梯度,海洋表面形成表面波导。如果声源位于混合层中,一定条件下声能将被限制在表面波导内,可以实现远距离传播,此时表面波导下方存在声影区,但声影区内并不是完全没有声能。波动效应会使一些声能进入声影区。在实际情况中声影区还会进入一些海面散射声和海底反射声。另外,表面波导不是稳定的信道,存在强烈的时空变异性,因此当拖曳线列阵在近海面工作时,其性能将受表面波导特性的影响。直达声路径和表面波导声路径如图3所示。
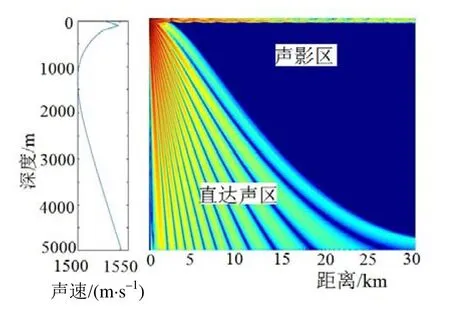
图3 表面波导和直达声传播路径
当利用拖曳线列阵对近距离目标进行探测时会接收到直达声线和海底反射声线,因此利用拖曳线列阵估计目标声源的方位时会分裂成两部分,容易被误认为有两个目标存在。Kevin D Heaney等人对菲律宾海试验数据进行分析[7],研究了界面散射效应对海底反射声能量的影响,发现直达声区存在如图4所示的方位分裂现象,但他们并没有针对这一现象做进一步研究。
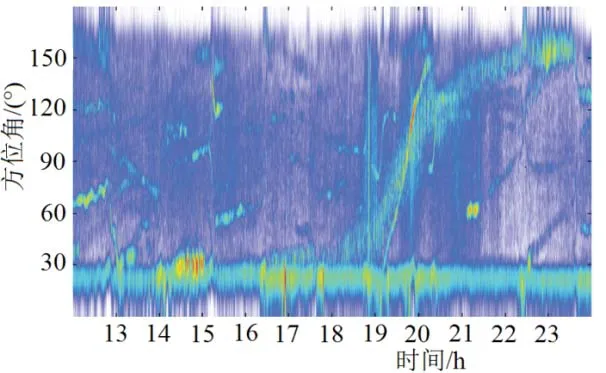
图4 海底反射信号和直达信号方位估计图
当目标位于直达声区内,且收发深度都较浅时,实际应用中很难提取直达声线和反射声线之间的时延差,这也给直达声区目标距离的估计带来困难。吴俊楠等人对西北太平洋海域的实验数据进行处理后也发现直达声区存在方位分裂现象,利用射线模型对该现象进行了理论分析[8]。与此同时,他们利用方位分裂现象,通过两个估计的方位角实现了被动测距。当水面只有一个目标时,文献[8]中的方法可以实现水面目标被动测距。但是,当水面存在多个目标时,上述方法将会失效,因此还需要对近程波束同源目标辨识方法进行研究。
2 表面波导特性及探测方法
海洋混合层结构对表面声道中的声传播特性有很大的影响[9],表面波导特性对声呐系统也有影响,因此表面波导及其声传播特性受到了广泛关注,从上世纪开始就开展了大量的研究。声速剖面在表面波导内为微弱正梯度,在一定的出射角和高频条件下,声线被限制在表面波导内。但是对于低频信号而言,由于声波波长太长,海面波导不能截留声能,图3所示的声传播路径图将不再适用。深海环境中,表面波导泄漏如图5所示。针对这一现象,Frank M Labianca给出了不同模态经典截止频率公式[10],当频率高于截止频率时,声能被表面波导截留,声能衰减慢;当频率低于截止频率时,声能泄漏到声影区,声能迅速衰减,但他给出的表达式只包含了表面波导的特征参数。Bucker H P对粗糙表面波导中的声传播进行了研究[11]。James Cummins研究了声源频率和接收深度对传播损失的影响[12]。William F Baker对实验数据进行分析,给出了声传播损失的经验公式[13]。
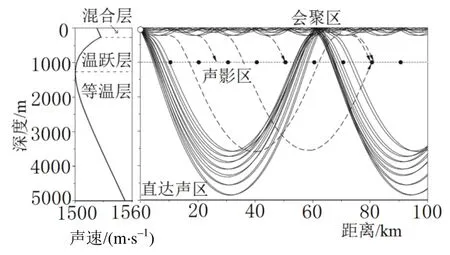
图5 表面波导泄漏示意图
DUAN等人对表面波导声传播的细节进行了研究[14-15],基于劳埃德镜干涉原理,他们推导了考虑声源深度的截止频率表达式,弥补了Frank M Labianca研究的不足,但是这一表达式只适用于近海面声源。因此,他们将这一截止频率公式与经典截止频率公式相结合,得到适用范围更广的截止频率表达式。当声源在近海面且频率较高时,表面波导中可能存在低传播损失区,他们给出了低传播损失区的估计方法,可为被动声呐的布放提供理论指导。另一方面,当表面波导中信号频率在截止频率以下时,频率越低,从表面波导泄漏的能量越大,声影区被照亮的程度越大,因此利用表面波导泄漏对声影区目标进行探测时需要使用低频信号。当声源和接收阵均位于表面波导内时,他们给出了基于简正波理论的波达角公式,利用这一表达式可以粗略估计信号的到达角,通过到达角的先验信息可以提高阵列的工作性能。肖鹏等人研究了随距离变化的表面波导对声场产生的影响[16]。Cheng Chen等人对近距离(8~15 km)表面波导泄漏能量和海底反射能量进行比较[17],通过对比分析两者的传播损失,可以为声影区目标探测提供指导。
表面波导泄漏是低频信号在深海中传播时的一种独有现象。上述研究给出了这一现象的物理机理,研究表明深海表面波导声场泄漏效应可以用于探测声影区目标,但目前利用表面波导泄漏探测声影区目标的应用研究较少。因此需进一步分析其机理,从而发展基于表面波导泄漏声场特征的探测技术。
3 声影区及探测方法
在会聚区之间反转折射声线无法到达的区域称为声影区[18]。在声影区内,只存在经海面或海底反射的声线,没有直达声线到达,Munk声速剖面条件下的近海面声源声传播路径如图6所示。尽管有部分声线经过反射或绕射进入声影区,但这些声线传播损失通常较大,特别在海底特性对反射信号影响很大的条件下。
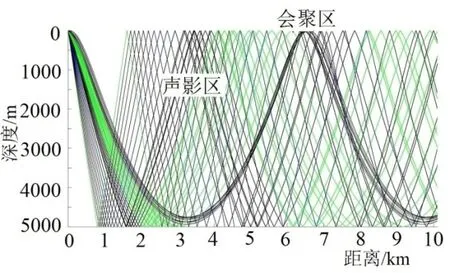
图6 Munk声速剖面条件下,近海面声源声传播路径
在深海环境中,如果声线传播过程只经过一次海底反射,声线的多途时延和到达角受海底底质影响相对较小,同时这些声线在声源处的出射角一般较大,水体中的声速剖面起伏对其影响也较弱,所以一次海底反射的多途时延和到达角较为稳定。综合利用声影区内信号的多途时延、信号到达角、干涉条纹特征等信息可以进行目标探测和定位。
声影区内,经过一次海底反射的声线多途时延和到达角较为稳定,采用自相关等方法就可以估计得到多途时延,另外通过拖曳线列阵可以估计多途信号的到达角,最终利用射线反传等方法可以实现目标定位。基于多途时延和到达角的目标探测方法已被广泛地研究和应用[19-20],特别是在海洋生物跟踪方面[21-22]。
由于拖曳线列阵的轴对称性,利用常规波束形成对偏离拖曳线列阵正横方向的声源进行方位估计时会出现偏差。针对方位估计偏差现象,吴俊楠等人从简正波理论和射线理论角度进行了分析[2,23]。从简正波理论角度来看,不同距离下有贡献的简正波不同,与其相对应的相速度也不同,选取参考声速不当会导致方位估计存在误差。从射线理论来看,海底反射声线到达不同距离处拖曳线列阵的俯仰角不同,导致方位估计出现误差。根据上述分析,他们提出了两种修正方位估计误差的方法。在距离已知的条件下,用不同距离处相速度作为参考声速做常规波束形成,得到的角度就是目标的真实方位;在距离未知的条件下,通过机动的方式改变拖曳阵轴向方向,画出机动前后估计方位随参考声速变化的曲线,两条曲线交叉的位置就是目标的真实方位。但现实中距离往往是未知的,并且机动过程中拖曳线列阵的阵形会发生改变,因此这两种方法并不是很实用,有必要对此做进一步研究提出更实用的方法。
在海洋波导中,声场强度在距离-频率二维平面上一般具有稳健的干涉结构,干涉结构反映了目标声源的几何特征,可以利用这一特征估计声源位置。在浅海环境中,干涉结构条纹的斜率基本保持不变,并用波导不变量来表示,波导不变量大约为1,这一特性在浅海声源被动定位中已得到广泛应用[24-25]。但是在深海环境中,干涉结构变得更加复杂多变,波导不变量不仅与声源深度、接收深度有关,还随距离和频率变化而变化。唐帅对典型深海声场干涉条纹特征进行了研究[26],理论和仿真结果表明,深海近距离没有明显的条纹,在会聚区和声影区都存在干涉条纹,并且这两区域内的干涉条纹样式相反。Rémi Emmetière等人基于简正波理论和射线理论给出了典型深海环境下波导不变量的近似理论表达式[27],通过该表达式可以预测不同区域波导不变量的分布。翁晋宝等人分析了典型深海条件下直达声区和影区声场频率-距离干涉结构[28],研究发现声强随频率有两种干涉周期,干涉周期随着收发深度的增加而减小,随着收发距离增加而增大。吴俊楠等人根据声场干涉结构[29],分析发现反射声场强度在频域呈现周期性,并且频域间隔和多途时延差的倒数相对应,利用多途时延与距离之间的关系,可以实现水面声源的被动测距。翁晋宝等人利用单水听器记录声场干涉结构[30],通过实验也证明了影区干涉结构用于被动测距的有效性。
目前,针对声影区目标探测方法已经开展了大量的研究,但是仍然存在一些问题需要解决。比如,当利用拖线阵对声源目标进行方位估计时会存在方位估计偏差问题,目前提出的方位估计偏差修正方法还不够实用,因此需进一步研究声传播理论,从而对现有的方位估计方法进行改进。另外,随着减震降噪技术的发展,潜艇声源级显著下降。与此同时,隐身潜艇表面覆有消声瓦,很大程度地减小了中高频主动声呐的探测距离,因此需要进一步发展基于海底反射声特性的低频主动探测技术,通过主被动结合的探测方法减小探测盲区。
4 会聚区及探测方法
会聚区是指在海面附近形成的高声强焦散区域。当声源位于海面附近或接近海底时,近海面会形成声强很高的会聚区。会聚区的传播损失比球面扩展损失小很多,利用会聚区在较远距离上就可以发现水下目标,因此会聚区参数特征受到了广泛的关注[31-34]。另外,拖曳线列阵接收到的远场信号会呈现一定的多途结构,所以利用会聚区内信号相关性、干涉条纹特征、目标强度特性等可以实现远距离目标探测和定位。Arthur B Baggeroer等人在菲律宾海利用FORA拖曳线列阵进行实验[35],研究发现会聚区内信号具有很强的时间相关性,这一特征可以用于目标的探测。杨刚等人对深海会聚区目标相对声强特性进行分析[36],通过仿真发现接收深度和目标深度相同时相对声强会出现双峰结构,这一现象可以用于目标深度的判定。郭李等人提出一种基于深海会聚区声强匹配处理的深海声源定位方法[37],但环境失配对该方法的影响比较大。
在会聚区内,干涉条纹主要由波导简正波干涉形成[38],其对应的波导不变量值为负。唐帅、崔宝龙等人对深海会聚区干涉条纹的分析表明,干涉条纹会随目标距离远近发生变化,可以利用这一现象判断目标是否位于会聚区内[39-40]。如果目标位于会聚区内,可以根据会聚区干涉条纹的变化判断会聚目标运动态势。
拖曳线列阵位于声影区内时,利用常规波束形成估计目标方位会存在方位估计偏差。同样地,拖曳线列阵在会聚区内对远场声源进行方位估计时也会存在偏差。李辉、杨坤德等人对这一现象进行了研究和分析,发现拖曳线列阵的方位估计偏差及传播损失随距离呈现周期性变化[41-42]。从简正波理论和射线理论角度出发,他们认为这一现象不仅与不同距离处对声场起主要作用的简正波号数不同有关,而且与声线分布以及声线掠射角也有关系。他们研究的结果有助于目标方位的准确估计,也可以通过方位估计偏差与会聚区的关系辅助判别目标进出会聚区。
利用会聚区虽然能实现远距离目标探测,但是在现实中会存在会聚区模糊问题。目标位于不同会聚区时,接收到的信号有很强的相似性,利用传统匹配场定位目标时,非目标所在会聚区会出现高旁瓣导致会聚区模糊。为了解决这一问题,王良等人提出了基于压缩感知理论的会聚区判别方法[43],通过仿真和海试数据证明该方法具有高分辨性能,并且能有效抑制会聚区判别中出现的旁瓣模糊问题。在低信噪比和声速失配条件下,该方法仍能准确判断出目标位于第一会聚区,但目标位于其它会聚区时该方法失效。
由于聚焦增益的原因,会聚区内传播损失小,适合用于远程目标探测,国内外对会聚区声场特性及探测方法已经开展了大量研究,但对目标进行探测时存在会聚区号模糊的问题仍然没有解决。因此需要对会聚区声场特征进一步研究,从而探讨会聚区号的可分性以及有效的会聚区号辨识技术。
5 总结与展望
由于深海特殊的声速分布和波导大尺度特点,深海声传播呈现传播模式分区的特性,本文分析了深海直达声区、表面波导、声影区以及会聚区的声场特征,并对基于这些声场特征的拖曳线列阵被动探测方法进行了介绍和梳理,笔者认为拖曳线列阵深海探测技术未来主要发展趋势体现在以下几点:
1、针对近程目标波束分裂和方位估计偏差问题,需发展基于拖曳线列阵的中近程波束同源目标辨识和方位精确估计技术;
2、目前研究表明深海表面波导声场泄漏效应可以用于探测声影区目标,但目前公开发表的应用研究较少,因此需进一步分析其机理,发展基于表面波导泄漏声场特征的探测技术;
3、针对声影区目标探测盲区大的问题,需发展基于海底反射声特征的主动探测技术,以减小探测盲区;
4、针对会聚区目标检测与辨识问题,需发展快速实用的会聚区目标辨识技术,研究会聚区号的可分性以及有效的会聚区号辨识技术;
5、为发挥拖曳线列阵深海探测最大效能,需发展深海探测效能评估技术,从而推荐拖曳线列阵深海探测的最优工作深度和信号处理参数;
6、随着大数据、人工智能技术的发展,尤其是近年成功应用的深度学习等技术[44-45],探讨其在深海被动目标探测方面的应用也是未来的发展方向。
猜你喜欢
高技术通讯(2022年12期)2022-03-23 07:33:24
声学技术(2020年6期)2021-01-08 08:31:54
铁道通信信号(2020年12期)2020-03-29 06:21:56
家庭影院技术(2018年11期)2019-01-21 02:20:54
电光与控制(2018年11期)2018-11-21 03:38:22
船舶经济贸易(2018年7期)2018-08-02 07:24:24
电光与控制(2018年4期)2018-04-19 01:19:59
优雅(2017年3期)2017-03-09 17:02:52
沈阳工业大学学报(2016年2期)2016-09-15 02:00:54
振动工程学报(2014年2期)2014-03-01 01:15:23
