
基于变论域模糊控制算法的树木年轮测量仪直流电机转速控制
2019-10-12 02:52:10姚建峰郑一力王雪峰赵燕东尘兴灿雷冠南唐守正
农业工程学报 2019年14期
姚建峰,卢 军,郑一力,王雪峰,赵燕东,尘兴灿,雷冠南,唐守正
基于变论域模糊控制算法的树木年轮测量仪直流电机转速控制
姚建峰1,2,卢 军1,郑一力3,王雪峰1,赵燕东3,尘兴灿3,雷冠南3,唐守正1※
(1. 中国林业科学研究院资源信息研究所,北京 100091;2. 河南省信阳师范学院计算机与信息技术学院,信阳 464000;3. 北京林业大学工学院,北京 100083)
为提高电机转速控制精度,分析了PID控制算法和变论域模糊控制算法原理,分别使用这2种控制算法控制年轮测量仪直流电机,并对落叶松、油松、云杉、山杨、白桦、红桦、辽东栎等7个树种圆盘进行测试,每个树种测试10次。变论域模糊控制算法电机转速在电机启动后约90 ms后进入稳定状态,PID控制算法约需要160 ms才进入稳定状态。在70组测试数据中,变论域模糊控制算法的误差标准差的总平均值是33.8 r/min,PID控制算法的误差标准差的总平均值是40.3 r/min,模糊控制算法的控制精度比PID控制算法高0.21%。试验结果表明:变论域模糊控制算法与PID控制算法相比,变论域模糊控制算法响应速度快、鲁棒性好、稳态误差小。在变论域模糊控制算法的控制下,年轮测量仪对7个树种的平均年轮测量精度是84.38%,而PID控制算法下的平均测量精度是78.13%。因此,年轮测量仪直流电机控制算法选用变论域模糊控制算法。
算法;模糊控制;树木年轮测量仪;PID控制;变论域
0 引 言
年轮(annual-ring),是木本植物茎横切面上的同心圆轮纹,通常每年形成一个轮,故称为年轮[1]。对于大多数树种,在树木生长季节早期所形成的木材,称为早材,早材密度较小,颜色较浅;在生长季晚期所形成的木材称为晚材,晚材密度较大,颜色较深[2-3]。当年的晚材与次年的早材之间,呈现轮纹,称为年轮线[4]。因此,树干任意一处的年轮线数目就是该处树干生长的年龄。根据年轮线之间的距离,可以计算树木的年生长量。树木年龄是森林资源调查的一项基本指标,是研究树木生长模型、评价立地质量、制定森林经营方案等科研工作中的基础数据。随着树轮研究的不断发展,树木年轮学已在林学、森林经理学、生态学、考古学、地质学、气候学、环境学等领域得到了广泛的应用[5-8]。
目前测量树木年轮最常用的方法是生长锥法,但是生长锥法取样困难、速度慢,且对树木生长有一定的负面影响[9]。我们正在研制的树木年轮测量仪是一种快速、微损测量树木年轮的设备,该设备类似于德国RINNTECH公司生产的RESISTOGRAPH树木针刺仪[10-12]。年轮测量仪通过直流电机带动钻针钻入树木,根据钻针所受阻力变化情况来估计树木年龄。当钻针钻入晚材部分时,晚材密度较大,钻针所受阻力较大;当钻针钻入早材部分时,早材密度较小,钻针所受阻力较小。通过对钻针阻力进行分析,可以判断树木的年龄、早材密度、晚材密度、年轮宽度等信息。当钻针以恒定的速度旋转时,钻针加速度为0,钻针阻力等于直流电机输出力矩。直流电机输出力矩与电枢电流成正比,当钻针转速误差较小时,钻针加速度近似为0,可用直流电机电枢电流来表示钻针阻力。由于不同树种之间树木密度差异较大,即使在同一树木中,树木的早材密度与晚材密度也有较大差异。因此,年轮测量仪直流电机负载变化很大。如果没有采用合适的转速控制算法控制电机,将导致电机转速不稳定,影响年轮测量仪测量精度。如何提高电机转速控制精度是年轮测量仪的关键技术之一。本文根据常用的PID控制算法和变论域模糊控制算法原理,分别设计和测试了这2种控制算法控制年轮测量仪的直流电机,并对针叶树(落叶松、油松和云杉)、软阔叶树(山杨和白桦)和硬阔叶树(红桦和辽东栎)等3种木材类型的7个树种圆盘进行测试。分析2种控制算法的控制指标,选用转速控制指标好的算法作为年轮测量仪直流电机的控制算法。
1 年轮测量仪直流电机控制原理
年轮测量仪直流电机控制系统主要由DSP(digital signal processing)控制器、电机驱动模块、直流电机和光电编码器等组成。电机控制系统原理图如图1所示。年轮测量仪处理器选用TI公司生产的TMS 320FS128 DSP处理器,该芯片不仅计算速度快,而且还包含了常用的电机控制系统所需要的功能模块。电机驱动模块主要是由4个N沟道MOS(metal-oxide-semiconductor)管组成的H桥式控制电路组成。MOS管在DSP的PWM(pulse width modulation)[13]控制信号的控制下,控制MOS管的通断时间,从而控制直流电机的平均电压。电机转速由HEDL-5540光电编码器测量。电机每旋转1周,光电编码器发送2 000个脉冲给DSP控制器。因此,电机转速、转速采样周期0、每个采样周期DSP接收到的脉冲个数之间的计算公式如式(1)所示。

本次试验电机转速设定值为3 000 r/min,转速采样周期0设置为0.5 ms,因此,每个采样周期DSP控制器应接收到的脉冲个数为50个。在本设计中,根据DSP每个采样周期应接收到的脉冲个数减去实际接收到的脉冲个数,得到转速误差。DSP根据转速误差,重新设置控制PWM信号的占空比,改变电机驱动模块输出的平均电压,减小电机转速误差。

注:α为PWM信号的占空比,%;U为平均电压,V;N为电机转速,r·min-1。
2 PID控制算法原理与实现
PID控制算法是根据被控对象的给定值与被控对象的实测值之间的误差作为控制器的输入量,经过比例、积分、微分运算后得到系统控制量[14-15]。比例运算是直接用比例系数乘以误差,误差一旦产生,控制器立即产生与误差成比例的控制器信号,以减小误差,其特点是响应速度快,但是不能消除误差;积分运算是用积分系数乘以积分时间内的误差和,只要误差累加和不为0,控制器产生与误差累加和成比例的控制器信号,以减小误差累加和,其特点是响应速度慢,但可以消除静态误差;微分运算是用微分系数乘以微分时间内的误差变化量,对系统起到超前控制的作用,将误差消灭于萌芽状态[16]。PID控制器结构图如图2所示。

注:r为给定值;e为给定值r与实测值y之间的误差;u为控制量。下同。
在计算机控制系统中,一般采用增量式PID控制算法。增量PID控制算法[17]的表达式为
∆()=K[()–(–1)]+Ke()+K[()–2(–1)+(–2)](2)


PID控制算法实现简单,容易理解,但是寻找最优的PID控制参数非常困难。本设计采用经验试凑法调整PID参数。首先在电机空载状态下调节PID参数,确定各PID参数的初始值,然后用年轮测量仪分别钻入不同树木密度的圆盘,分析电机转速的最大误差及调节时间,逐步优化PID参数。经过大量试验,比例系数K=0.15,积分系数K=0.9,微分系数K=0.1可以兼顾系统的稳定性和实时性,达到比较理想的控制效果。
3 变论域模糊控制算法原理与实现
3.1 模糊控制算法原理
模糊控制首先把专家控制经验总结成一系列控制规则,然后通过模糊推理和查表的方式来使用这些规则,使控制器能模拟人脑的思维方法,实现对被控参数进行在线实时调节[18-20]。模糊控制器控制处理过程主要包括以下4个步骤[21]:
1)输入变量计算:将被控变量的给定值减去实测值,计算当前误差,然后对进行微分运算(对于离散系统,用当前误差减去上次误差),求出误差变化率,和是真实量,是模糊控制器的输入变量。
2)模糊化处理:将真实量和通过量化因子k、k预处理后利用隶属度函数转化为模糊量和。
3)模糊决策:根据模糊推理方法,对模糊化的被控参数进行决策,调用相应的模糊控制规则,得到输出控制量的模糊值。

典型的模糊控制器结构图如图3所示。

注:ec为误差变化率的真实量;ke为误差的量化因子;kec为误差变化率的量化因子;E为误差的模糊量;EC为误差变化率的模糊量;U为控制量的模糊量。
3.2 论域伸缩思想
论域范围和模糊量等级划分个数对模糊控制器的控制精度有较大影响[22]。一般情况下,模糊量等级个数越多,论域范围越小,等级划分越细,控制器控制精度越高。但是,当模糊量等级划分个数过多,由于测量误差的存在,分类越细导致测量误差在分类中的作用越大,可能引起分类错误,从而导致控制精度降低。因此,本文引进自适应调整论域的思想:控制器根据误差及误差变化率,实时调整真实量论域,从而调整输入量化因子和输出比例因子,在不增加模糊等级数量的情况下,使同一等级模糊变量对应的真实量的范围能根据实际情况自动扩大或者缩小,提高模糊控制器控制精度。
3.3 论域收缩因子计算方法
为了便于理解,把张建国等[22]、郭海刚等[23]和于江海[24]提出的论域收缩因子计算方法简要叙述如下:
经过归一化处理后,当||→1时,()→1,则的论域扩张;当||→0时,()→0,则的论域收缩。常取整数,值越大,论域伸缩越快,值越小,论域伸缩越慢。
设模糊控制系统实时误差,误差变化率和控制量的初始论域分别为[−0,0]、[−1,1]和[−1,1],把,0和,0分别代入式(3)中并加入最小论域取值范围系数l,分别得到的收缩因子a和的收缩因子a。a和a的表达式分别如下


控制量的论域收缩因子a是a和a的函数,并很难得到该函数的准确描述。根据被控系统的动态响应来定性分析得到a与a和a的变化规律。
3.4 变论域模糊控制算法在年轮测量仪中的实现
根据变论域因子计算过程和模糊控制算法的控制过程,结合年轮测量仪的控制要求,用C语言编程实现了变论域模糊控制算法。具体设计过程如下:
1)设置转速误差、转速误差变化率和控制PWM占空比的定时器的比较寄存器的增量的初始论域。在本设计中,根据每个采样周期DSP处理器应接收到的脉冲个数减去实际接收到的脉冲个数来表示电机转速误差的。本次试验电机转速设定值为3 000 r/min,转速采样周期0设置为0.5 ms,因此,每个采样周期DSP处理器应接收到的脉冲个数为50个。因此,转速的最小误差是−50。为了使误差初始论域以0为中心对称,所以转速误差的初始论域设置为[−50,50]。由于误差变化率是当前误差减去上一个采样周期的误差,所以误差变化率的初始论域设置为[−100,100]。为了使电机电枢电压不剧烈变化,每次改变PWM信号占空比的值不超过10%。在本设计中,PWM信号的频率是10 kHz,定时器的输入时钟频率是75 MHz,所以控制PWM的定时器的周期寄存器的值设置为7 500。因此,每个控制周期定时器的比较寄存器值的最大变化量不超过750。经过反复测试,控制PWM定时器比较寄存器的增量的初始论域设置为[−600,600]比较合适,即不影响转速控制系统的实时性,又不引起电机两端电压的剧烈震荡。
2)选择和收缩因子函数中的=0.95、=5代入(4)式和(5)计算收缩因子a和a。然后根据(6)式计算输出比例因子a。
3)计算、和的伸缩后的论域。设、和的伸缩后的论域分别为[−1,1]、[−1,1]和[−1,1],1、1和1分别为ae0、aec0和au0。
4)设置模糊变量、和的模糊集。模糊等级划分越多,模糊控制器精度越高。但是当模糊等级划分越多,模糊控制规则就越多,模糊推理就越复杂,难以发挥模糊控制算法的优点。模糊等级划分过少,又影响模糊控制器的控制精度。经过反复测试,在本设计中,和划分成9个等级、划分成17个等级比较合适。模糊变量、和的模糊集分别为{−4,−3,−2,−1,0,1,2,3,4}、{−4,−3,−2,−1,0,1,2,3,4}、{−8,−7,−6,−5,−4,−3,−2,−1,0,1,2,3,4,5,6,7,8}。
5)计算量化因子和输出比例因子。k、k分别为输入变量和的量化因子,k输出变量的输出比例因子。本设计中,模糊控制器输入变量的真实量乘以量化因子,得到输入变量的模糊量,因此,输入量量化因子是输入量模糊集合中的最大值除以对应输入量收缩后的论域中的最大值的商。和模糊集中的最大值都是4,和收缩后的论域中的最大值分别为1和1,所以k和k的计算表达式分别为4/1和4/1。模糊控制器输出变量的模糊量乘以输出比例因子得到输出变量的真实量,因此输出量比例因子是输出量收缩后的论域中的最大值除以输出量模糊集合中的最大值的商。输出量收缩后的论域中的最大值1,的模糊集中的最大值是8,所以输出比例因子的计算表达式是1/8。
6)模糊化输入变量。将和分别乘以量化因子k、k,然后按四舍五入法取整数,分别得到对应的模糊量和。


表1 控制量U模糊规则控制表
8)计算真实输出量=kU。
9)更新PWM占空比。重新设置控制PWM占空比定时器的比较寄存器的值为比较寄存器的当前值加上。
4 试验与结果
4.1 试验样本与试验方法
取样区域位于山西省吕梁市关帝山林区的龙兴林场,地理位置在111°30′-111°40′E,37°28′-37°35′N,东西长约30 km,南北宽约9 km,森林覆盖率高达88%。该区域属于温带大陆性山地气候区,年平均气温8.92 ℃。主要树种有落叶松、油松、云杉、山杨、白桦、红桦、辽东栎等。该地区树种丰富,四季分明,树木年轮线清晰。2018年7月在龙兴林场取样落叶松、油松、山杨、白桦、红桦、辽东栎、云杉等7个树种各1棵,分别在树干高0.5、1.3、3.3、5.3和7.3 m处各截取厚度为5~7 cm圆盘。取样树种包括针叶树、硬阔叶树和软阔叶树,树木木材密度分布基本涵盖了温带常见树木密度分布范围。
分别使用PID控制算法和变论域模糊控制算法对年轮测量仪进行控制,对落叶松、油松、山杨、白桦、红桦、辽东栎、云杉等7种树木的圆盘进行测试。每种树木选取5个圆盘,每个圆盘分别用2种控制算法各测试2次。2种控制算法的测量点尽可能相近,以保证2种控制算法钻入圆盘路径相近,2次钻入圆盘路径的木材材性差异不大。对比分析年轮测量仪在这2种控制算法控制下年轮测量仪电机启动性能和钻入圆盘整个过程的电机转速误差。
4.2 电机启动性能分析
PID控制算法和变论域模糊控制算法的电机启动转速曲线图如图4所示。从图中可以看出,变论域模糊控制电机启动速度快,虽有约10%的超调量,但是,电机转速在电机启动约90 ms后就进入稳定状态;PID算法启动慢,尽管没有超调量,但转速在电机启动后约160 ms才进入稳定状态。

图4 电机启动转速曲线图
4.3 年轮测量仪钻入圆盘全过程转速误差分析
计算每次测量圆盘全过程的转速误差标准差,分别统计分析每个树种在PID控制算法和变论域模糊控制算法下每次测试的电机转速误差标准差的平均值、标准差的变化范围,统计结果如图5所示。
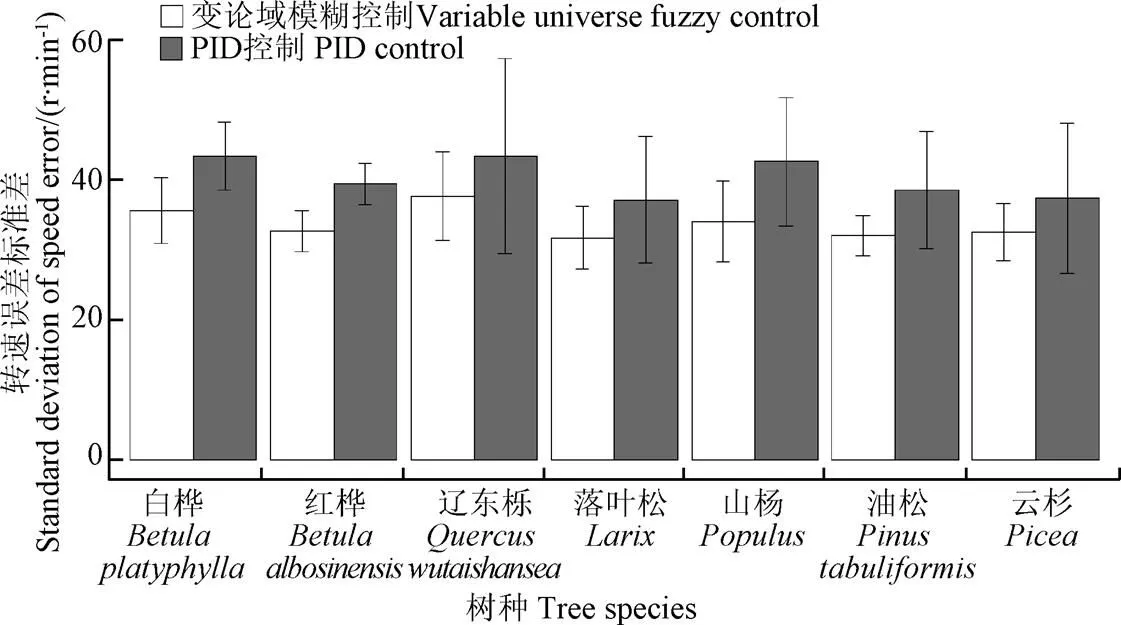
图5 电机转速误差标准差直方图
从图5中可以看出:所有树种的变论域模糊控制算法的误差标准差的平均值均小于PID控制算法的误差标准差的平均值;变论域模糊控制算法的误差标准差的总平均值是33.8 r/min,PID控制算法的误差标准差的总平均值是40.3 r/min,由于电机转速的设定值是3 000 r/min,所以模糊控制算法的控制精度比PID控制算法高0.21%;除红桦外,其他6个树种的变论域模糊控制算法的误差标准差的变化范围均小于PID控制算法的误差标准差的变化范围。
为了检验每个树种在2种控制算法的控制下的转速误差是否存在差异,我们对转速误差进行了检验,检验结果如表2所示。检验结果显示,2种控制算法转速误差有显著差异。
4.4 电机转速变化对电机电流的影响
当电机转速不变时,钻针加速度为0,钻针阻力力矩等于电机输出力矩。当电机转速发生变化时,即使钻针阻力不变,直流电机输出力矩也会发生变化,导致直流电机电流发生变化。为了验证电机转速变化对电机输出电流的影响,做了年轮测量仪空转试验(钻针阻力不变)。当电机转速的设置值为3 000 r/min,当电机转速稳定后,滤波后的电机电流变化幅度很小。电机转速曲线图和滤波后的电机电流曲线图如图6所示。

表2 转速误差统计检验结果

图6 电机转速设定值不变时电机电流和电机转速曲线图
当电机转速的设定值为3 000(1+0.05sin(2π/ (1 0000)))r/min(为测量时间,ms;0采样周期,ms),当电机转速与电机设定转速同步变化时,滤波后的电流变化频率与转速设置值的变化频率相同,电流波动幅度约为电流平均值的3.4%。电机转速曲线图和滤波后的电机电流曲线图如图7所示。试验结果表明:当电机负载不变时,如果电机转速发生波动,电机电流也会随之产生波动。
4.5 2种转速控制算法对年轮测量精度的影响
首先打磨圆盘直至年轮线清晰为止,然后扫描打磨后的圆盘,并使用WinDENDRO软件处理圆盘图片,记录每个圆盘的树木年龄。最后对直流电机电流数据进行滤波处理,分析滤波后的电流数据波形图,根据电流波峰或波谷的个数以及相邻波峰间的水平距离及波峰与波谷垂直距离,结合每个树种年轮宽度、早材与晚材的密度差异等,通过人工方式数电流波峰的个数来确定每次钻针钻过圆盘的年龄,计算每次测量年轮的精度,分析2种控制算法下每个树种的平均年轮测量精度,分析结果如表3所示。在变论域模糊控制算法的控制下,年轮测量仪对7个树种的平均年轮测量精度是84.38%,而PID控制算法下的平均测量精度是78.13%。
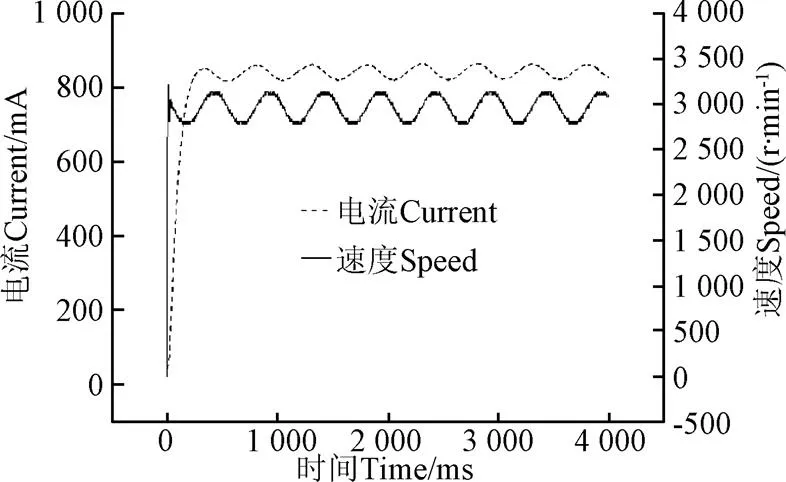
图7 电机转速设定值周期性变化时电机电流和电机转速曲线图
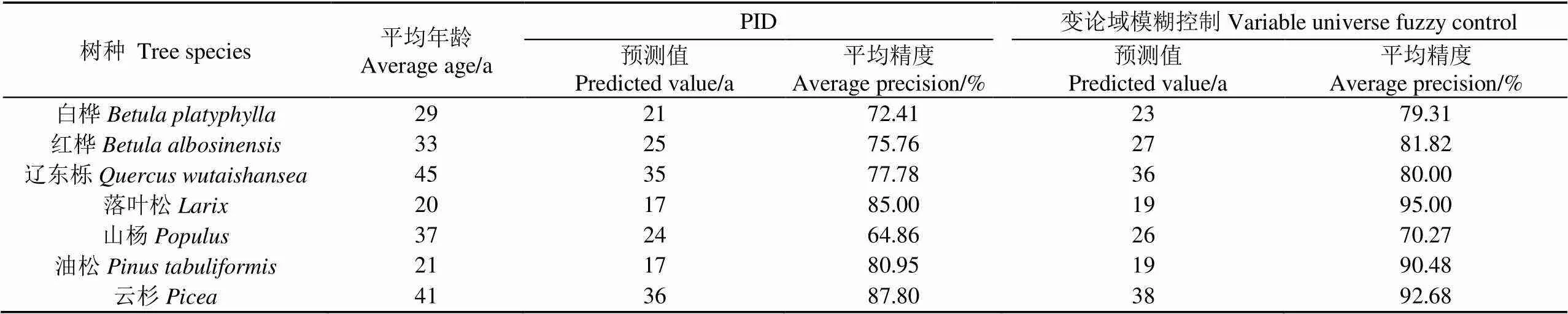
表3 年轮测量结果统计
5 讨 论
为了使年轮测量仪直流电机电流波形图能直观地反应树木年轮信息,需要提高电机控制系统的实时性,提高电机转速控制精度[25]。当钻针钻入晚材时,电机负载增大,电机转速降低,需要及时增加电机电枢电压,使电机电枢电流增大,从而增加电机输出力矩。当钻针钻入早材时,电机负载减小,电机转速升高,需要及时减小电机电枢电压,使电机电枢电流减小,从而减小电机输出力矩。如果电机控制系统实时性较差,当钻针钻入晚材时,电流上升速度较慢,当钻针钻入早材时,电流下降速度较慢,导致电机转速误差较大,从而使电机电流的变化情况不能准确地反应树木年轮信息,降低树木年轮测量精度。由于目前年轮识别算法还不够完善,年轮测量结果依靠人工方式数电流波峰的个数确定树木年龄,测量结果还不够精确。在以后的研究中,课题组成员将重点优化电流滤波算法和年轮识别算法,逐步完善年轮测量仪的功能,提高年轮测量仪测量精度。
6 结 论
1)变论域模糊控制算法鲁棒性好。在测试的7个树种中,有6个树种的变论域模糊控制算法的误差标准差变化范围小于PID算法的误差标准差的变化范围,只有1个树种的变论域模糊控制算法的误差标准差变化范围稍大于PID算法的误差标准差的变化范围,表明变论域模糊控制算法速度变化范围小,鲁棒性好。
2)变论域模糊控制算法转速控制精度高。在测试的7个树种中,变论域模糊控制算法的误差标准差的平均值均小于PID控制算法的误差标准差的平均值,表明变论域模糊控制算法的控制精度高于PID控制算法的控制精度。
3)在变论域模糊控制算法的控制下年轮测量精度高。在变论域模糊控制算法的控制下,年轮测量仪对7个树种的平均年轮测量精度是84.38%,而PID控制算法下的平均测量精度是78.13%。
[1] 王亚平,许春雪. 树木年轮学在环境变化研究中的应用[J].岩矿测试,2005,24(2):129-134.
Wang Yaping, Xu Chunxue. Application of tree-rings in environmental changes studies[J]. Rock and Mineral Analysis, 2005, 24(2): 129-134. (in Chinese with English abstract)
[2] 王树芝. 树木年代学研究进展[J]. 考古,2001(7):47-54.
Wang Shuzhi. Research advances in dendrochronology[J]. Archiaeology, 2001(7): 47-54. (in Chinese with English abstract)
[3] 唐亚,谢嘉穗,李蓬勃,等. 树木年代学在山地自然灾害研究中的应用[J]. 工程科学与技术,2018,50(3):24-32.
Tang Ya, Xie Jiasui, Li Pengbo, et al. Potential applications of dendrochronology in the research of mountain natural disasters[J]. Advanced Engineering Sciences, 2018, 50(3): 24-32. (in Chinese with English abstract)
[4] 孟宪宇. 测树学[M]. 第3版. 北京:中国林业出版社,2006.
[5] 方克艳,陈秋艳,刘昶智,等. 树木年代学的研究进展[J].应用生态学报,2014,25(7):1879-1888.
Fang Keyan, Chen Qiuyan, Liu Changzhi, et al. Research advances in dendrochronology[J]. Chinese Journal of Applied Ecology, 2014, 25(7): 1879-1888. (in Chinese with English abstract)
[6] 黎娜,刘常富,濮佳明. 树木年轮在气候变化研究中的应用[J]. 湖南农业科学,2009(11):135-137,141.
Li Na, Liu Changfu, Pu Jiaming. Application of tree-ring in climate change research[J]. Hunan Agricultural Sciences, 2009(11): 135-137, 141. (in Chinese with English abstract)
[7] 郑淑霞,上官周平. 树木年轮与气候变化关系研究[J]. 林业科学,2006,42(6):100-107.
Zheng Shaxia, Shangguan Zhouping. Study on relationship between tree-ring and climatic change[J]. Scientia Silvae Sinicae, 2006, 42(6): 100-107. (in Chinese with English abstract)
[8] 祁承经,赵运林,喻勋林,等. 树木年轮学综论[J]. 中南林业科技大学学报,2017,37(3):1-8,16.
Qi Chengjing, Zhao Yunlin, Yu Xunlin, et al. A comprehensive review on dendrochronology[J]. Journal of Central South University of Forestry & Technology, 2017, 37(3): 1-8, 16. (in Chinese with English abstract)
[9] 王庭魁,刘自强,王耀明. X射线无损检测树木年轮的研究[J]. 东北林业大学学报,1987,15(2):97-101.
Wang Tingkui, Liu Ziqiang, Wang Yaoming. Non-destructive detection of annual rings in wood by X-ray transmissive technique[J]. Journal of North-east Forestry University, 1987, 15(2): 97-101. (in Chinese with English abstract)
[10] Frank Rinn. Basics of micro-resistancedrilling for timber inspection[J]. Holztechnologie, 2012, 53(3): 24-29.
[11] Gao Shan, Wang Xiping, Wiemann Michael C, et al. A critical analysis of methods for rapid and nondestructive determination of wood density in standing trees[J]. Annals of Forest Science, 2017, 74(2):27.
[12] Rinn F, Schweingruber F H, Schär E. RESISTOGRAPH and X-ray density charts of wood comparative evaluation of drill resistance profiles and X-ray density charts of different wood species[J]. Holzforschung, 1996, 50(4): 303-311.
[13] 刘松斌,王海星,李硕恒. 基于STM32的直流电机PWM调速系统[J]. 化工自动化及仪表,2016,43(8):834-837.
Liu Songbin, Wang Haixing, Li Shuoheng. Design of DC motor PWM speed control system based on STM32[J]. Control and Instruments in Chemical Industry, 2016, 43(8): 834-837. (in Chinese with English abstract)
[14] 陈孝伟,韩璞,张悦. 一种变比例自适应PID控制方法的研究[J]. 计算机仿真,2016,33(6):278-281.
Chen Xiaowei, Han Pu, Zhang Yue. A control method of variable proportion adaptive PID[J]. Computer Simulation, 2016, 33(6): 278-281. (in Chinese with English abstract)
[15] 杨世勇,徐国林. 模糊控制与PID控制的对比及其复合控制[J]. 自动化技术与应用,2011,30(11):21-25.
Yang Shiyong, Xu Guolin. Comparison and composite of fuzzy control and PID control[J].Industry Control and Applications, 2011, 30(11):21-25. (in Chinese with English abstract)
[16] 王威立,栗文雁. 高精度伺服控制系统[M]. 第1版. 北京:知识产权出版社,2016.
[17] 丁友强,杨丽,张东兴,等. 玉米变量播种机单体驱动器的设计[J]. 农业工程学报,2019,35(11):1-9.
Ding Youqiang, Yang Li, Zhang Dongxing, et al. Design of row-unit driver for maize variable rate planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(11): 1-9. (in Chinese with English abstract)
[18] Ding Hao, Zhang Xiaohui, Fan Guoqiang. Design of fuzzy control system for orchard frost protection wind machine and experiments of frost protection effect[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2019,35(5): 73-80.
丁皓,张晓辉,范国强.果园防霜机模糊控制系统设计及防霜效果试验 [J].农业工程学报,2019,35(5):73-80.(in English with Chinese abstract)
[19] 张宗宝,周宏甫. 基于DSP直流电机速度的模糊控制系统研究[J]. 现代电子技术,2008,31(10):57-60.
Zhang Zongbao, Zhou Hongpu. Fuzzy system DSP-based for DC motor speed control[J]. Modern Electronics Technique, 2008, 31(10): 57-60. (in Chinese with English abstract)
[20] 胡志刚,李尧. 直流调速系统智能算法设计[J]. 变频器世界,2016(8):66-70.
Hu Zhigang, Li Yao. Intelligent algorithm design for DC motor speed regulating system[J]. The world of Inverters, 2016(8): 66-70. (in Chinese with English abstract)
[21] Li Hanxiong, Gatland H B. Conventional fuzzy control and its enhancement[J]. IEEE Transactions on Cybernetics, 1996, 26(5): 791-797.
[22] 张建国,任永泰,辛明影. 模糊控制器的优化设计(Ⅰ):模糊控制规则简化的研究[J].东北农业大学学报,2002, 33(3):291-295.
Zhang Jianguo, Ren Yongtai, Xin Mingying. The optimized design of the fuzzy controller(Ι): The predigested disquisition of rules of fuzzy control[J]. Journal of Northeast Agricultural University, 2002, 33(3): 291-295. ( in Chinese with English abstract)
[23] 郭海刚,李洪兴,胡凯. 一类变论域自适应模糊控制器[J]. 模糊系统与数学,2011,25(6):32-42.
Guo Haigang, Li Hongxing, Hu Kai. A novel variable universe adaptive fuzzy controller[J]. Fuzzy Systems and Mathematics, 2011, 25(6): 32-42. (in Chinese with English abstract)
[24] 于江海. 自适应模糊控制器的研究[J]. 自动化与仪表,2010,25(9):36-40.
Yu Jianghai. Study on adaptive fuzzy controller[J]. Automation & Instrumentation, 2010, 25(9): 36-40. (in Chinese with English abstract)
[25] Szewczyk G, Wąsik R, Leszczyński K, et al. Age estimation of different tree species using a special kind of an electrically recording resistance drill[J]. Urban Forestry & Urban Greening, 2018, 34: 249-253.
DC motor speed control of annual-ring measuring instrument based on variable universe fuzzy control algorithm
Yao Jianfeng1,2, Lu Jun1, Zheng Yili3, Wang Xuefeng1, Zhao Yandong3, Chen Xingcan3, Lei Guannan3, Tang Shouzheng1※
(1.,,100091,;2.,,464000,; 3.,,100083,)
A annual-ring measuring instrument drives a drill needle into a tree by a DC motor and determines the age of the tree according to the change of the resistance of the drill needle. Because the density of trees varies greatly among different tree species, even in the same tree, the density of early wood and late wood also varies greatly, the resistance of the drill needle varies greatly and the load of the DC motor varies greatly. If the DC motor is not controlled by a suitable speed control algorithm, the speed error of the DC motor will be very large. The measuring accuracy of the annual-ring measuring instrument decreases with the increase of the DC motor speed error. How to improve the accuracy of motor speed is one of the key technologies in the annual-ring measuring instrument. The principle of PID control algorithm and variable universe fuzzy control algorithm were analyzed. The two control algorithms were used to control DC motor of annual ring measuring instrument, respectively. The discs of 7 tree species, including,,,,,andwere drilled by the annual-ring measuring instrument that was controlled by PID control algorithm and variable universe fuzzy control algorithm, respectively. The experimental tree species included conifers, hard broadleaf trees and soft broadleaf trees. The wood density distribution of experimental trees basically covered the density distribution range of common trees in temperate zone. Five discs were selected for each experimental tree species, and each disc was tested twice with the two control algorithms, respectively. The starting measurement points of the two control algorithms were as close as possible and the measurement directions of the two control algorithms were the same in every group test to ensure that the drilling paths of two control algorithms in the disc was close, and the difference of wood properties of the two drilling paths was little. The starting characteristics of DC motor, the standard deviation of DC motor speed error was analyzed. If the motor was controlled by the variable universe fuzzy control algorithm, it took about 90 ms to reach a stable state after the motor was started, while if the motor was controlled by the PID control algorithm, it took about 160 ms. In 70 tests, the average error standard deviation of the variable universe fuzzy control algorithm was 33.8 r/min, and that of the PID control algorithm was 40.3 r/min. The control precision of the variable universe fuzzy control algorithm was 0.21% higher than that of the PID control algorithm. Among the 7 tested tree species, the variation range of error standard deviation of variable universe fuzzy control algorithm of 6 tree species was less than that of PID algorithm, and that of variable universe fuzzy control algorithm of only one tree species was slightly larger than that of PID algorithm. The experimental results show that the variable universe fuzzy control algorithm has the advantages of faster response, better robustness and smaller steady-state error compared with PID control algorithm. Therefore, the variable universe fuzzy control algorithm was selected to control the DC motor of the annual- ring measuring instrument.
algorithms; fuzzy control; annual-ring measuring instrument; PID control; variable universe
2019-05-21
2019-06-08
中央级公益性科研院所基本科研业务费专项资金重点项目(CAFYBB2018SZ007)
姚建峰,博士生,讲师,研究方向为林业装备自动化。Email:249749251@qq.com
唐守正,博士,研究员,中国科学院院士,研究方向为林业统计和生物数学模型。Email:stang@caf.ac.cn
10.11975/j.issn.1002-6819.2019.14.007
S758.7
A
1002-6819(2019)-14-0057-07
姚建峰,卢 军,郑一力,王雪峰,赵燕东,尘兴灿,雷冠南,唐守正. 基于变论域模糊控制算法的树木年轮测量仪直流电机转速控制[J]. 农业工程学报,2019,35(14):57-63. doi:10.11975/j.issn.1002-6819.2019.14.007 http://www.tcsae.org
Yao Jianfeng, Lu Jun, Zheng Yili, Wang Xuefeng, Zhao Yandong, Chen Xingcan, Lei Guannan, Tang Shouzheng. DC motor speed control of annual-ring measuring instrument based on variable universe fuzzy control algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(14): 57-63. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.14.007 http://www.tcsae.org
猜你喜欢
红蜻蜓·低年级(2021年12期)2022-01-19 05:18:24
建材发展导向(2021年13期)2021-07-28 07:14:56
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
电子制作(2019年9期)2019-05-30 09:42:02
中学生数理化·中考版(2018年11期)2019-01-31 06:18:04
测控技术(2018年10期)2018-11-25 09:35:52
小天使·一年级语数英综合(2018年7期)2018-09-12 10:13:26
电子制作(2017年7期)2017-06-05 09:36:14
滇池(2017年5期)2017-05-19 03:22:18
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
