面向作战效能优化的反辐射无人机目标分配
2019-10-11 08:11:22蔡译锋
无线电工程 2019年10期
李 峥,蔡译锋,吴 军
(西南电子设备研究所,四川 成都 610036)
0 引言
反辐射无人机作为重要的硬杀伤武器,能够自主完成寻的和制导,实现对威胁辐射源的动态打击[1]。传统运用反辐射无人机多为单机或双机编组对单个目标进行预置参数式打击。随着战场辐射源目标数量的增多、地理密度增加和战技手段增强,预置模式的打击效果明显下降。同时使用多架无人机构建无人机集群,对敌方的多部威胁辐射源进行集群式打击[2]的作战模式,集群式打击应运而生,。
多目标分配是集群作战中有助于提升作战效能的一项关键问题[3],学界的相关研究提供了不同的解决方式。最简单的解决方式为遍历法,通过对所有目标分配方案进行遍历,选取作战效能最大的方案,但是面临计算量过大的问题。满意决策法对遍历法进行了改进,对每个无人机划定可能的作战目标范围,在范围内进行搜索,从而提高计算效率[4-5]。当存在定性约束条件时,模糊推理法根据实际情况和专家经验给出不同目标定性条件重要度的相对隶属度关系,从而实现无人机集群作战中的目标分配[6]。博弈论方法考虑攻防双方对目标分配的影响,能够较逼真地反映作战过程,使目标分配结果对作战效能具有较大的提升作用[7]。随着各种智能算法的发展,无人机作战目标分配找到了新的发展方向[8],粒子群算法[9]和遗传算法[10]将目标分配问题建模为数值问题进行计算,简化分析过程,但普遍面临局部最小化的问题;而聚类算法[11]将目标根据属性相似性聚集成类,建模过程相对复杂。
现有无人机集群作战目标分配算法普遍面临计算量大、不能定量分析和局部最小化等问题,在实战应用中的可实现性较差。为探索更为贴近实战使用的无人机作战目标分配方法,本文以最大化作战效能期望为目标,利用贪心法设计出一种作战目标分配算法,该方法能够得到全局最优解,并且计算量较小,具备工程可实现性,能够为实战中的反辐射无人机自主作战目标分配提供理论支撑。
1 作战目标分配问题建模
不同辐射源威胁程度存在差异,集群式反辐射运用需要对无人机集群进行作战目标分配,确定每个无人机的攻击对象,提升整体作战效能。同时,在执行任务过程中,作战进程会随作战过程不断变化,造成战前目标分配策略需要根据实时战场情况快速、准确地完成目标重分配。在无人机集群式作战模式下,不同无人机之间的协同通常通过构建无中心的自组网络并采用分布式控制算法完成,最大程度上减少无人机集群在任务执行过程中对地面站以及空地通信链路的依赖。在机间自组网和分布式自主协同的架构下,无人机的各类控制算法必须在自身的内置计算芯片上实现,这就要求面向任务执行过程中的无人机动态作战目标分配算法必须能适应无人机芯片计算能力有限的现实情况。因此,反辐射无人机作战目标分配方法不仅需要能够最大化优化集群作战效能,还需要算法高效以满足实时目标重分配的高时效性要求[12]。

在进行作战目标分配时,假设当前目标辐射源数量m、各辐射源权重wi以及打击成功率pi均已知。由于各无人机的性能完全相同,则由n架无人机组成的集群进行作战目标分配的本质为确定分配到各目标辐射源的无人机个数。因此,无人机集群的作战目标分配策略可用包含m个元素的集合S={ci|i=1,2,…,m}来表示,其中,ci∈[0,n]是分配到第i个辐射源的无人机数量。
由于在进行作战目标分配时,打击任务还未完成,因此无法计算集群作战效能Q,可通过计算集群作战效能Q的数学期望作为对集群作战效能的评估准则,并在此基础上进行目标分配方案设计。对于一种给定的分配策略S,其对应的集群作战效能的数学期望为:
(1)
综上,本论文需要解决的问题可描述为:在给定目标辐射源数量m、各辐射源权重wi、打击成功率pi、无人机数量n的情况下,寻找一种目标分配策略S= {ci|i=1,2,…,m},使集群作战效能的数学期望E(S)最大化。
2 作战目标分配方法
2.1 作战目标分配算法描述

Δ=k(m,n+1)-k(m,n)=
(2)
由式(2)可以看出,m≥2的情况下,k(m,n)的值随着n的增加单调递增,在m=2时保持线性增长,而在m≥3的情况下,k(m,n)的增速随n的增大而增大。上述结论可理解为,随着反辐射打击场景规模的增大,目标分配方案的总数持续增多,若采用遍历法对问题去进行求解,其所需的计算时间将随着打击场景规模的增大而快速增加。战场态势变化迅速,进行目标重分配计算必须尽快完成才能适应作战要求。因此,采用遍历法难以适用上述动态目标分配的场景。
为解决上述问题,本文采用“贪心法”[16]实现一种高效的目标分配策略。

wi[(1-pi)di(j)-(1-pi)di(j)+1],
(3)
式中,di(j)是在第j轮分配之前,已经分配到辐射源i上的无人机数量。在对所有的m个辐射源的分配增益都计算完毕后,选择其中分配增益最大的辐射源,并将该辐射源分配给第j架无人机。重复上述过程直到给所有的无人机都完成作战目标分配。
上述算法流程如图1所示。

图1 算法流程
2.2 算法最优性证明
对于问题1中任何一个分配策略S={ci|i=1,2,…,m},都可以通过依次为n架无人机分配其作战目标的方式获得。

(4)
式中,u(j)是在第j轮中为第j架无人机分配的目标辐射源编号。对于辐射源i,由S={ci|i=1,2,…,m}可知共ci架无人机分配了该目标。将式(4)中所有满足u(j)=i的ci个分量提取出来,设上述ci个分量对应的无人机编号由小到大依次为v(1),v(2),…,v(ci),则上述ci个分量的和为:
wi[(1-pi)di(v(1))-(1-pi)di(v(1))+1]+
wi[(1-pi)di(v(2))-(1-pi)di(v(2))+1]+…+
wi[(1-pi)di(v(ci))-(1-pi)di(v(ci)+1)]=
wi[(1-pi)0-(1-pi)1]+
wi[(1-pi)1-(1-pi)2]+…+
wi[(1-pi)ci-1-(1-pi)ci]=
wi[1-(1-pi)ci]。
(5)
综合考虑所有的m个辐射源有:
(6)
即Fn与分配策略S对应集群作战效能相等。进而,问题1可等价于:
在给定目标辐射源数量m、各辐射源权重wi、打击成功率pi、无人机数量n的情况下,寻找一种目标分配策略S= {ci|i=1,2,…,m},使Fn最大化。

对Φ(i,j)关于j求偏导可得:
(7)

Φ(i,j)≥Φ(i,j')。
(8)





也一定是所有可能当中最大的,由式(6)可知,采用本文算法得到策略的集群作战效能的数学期望也是最大的。
3 仿真与分析
为验证所述目标分配方法的效能,首先通过仿真对该方法所对应的作战效能期望以及计算时间进行测试,然后设计反辐射无人机集群执行反辐射任务的典型场景,验证使用该方法进行战前静态目标分配以及临机动态目标分配所对应的作战效果。
3.1 算法效能分析
本节针对所述目标分配方法,利用Matlab进行仿真,分析对应的作战效能期望和计算时间情况。
仿真分为2组,分别分析在辐射源数量m和无人机数量n变化时,所述方法对应的作战效能期望和计算时间变化情况,并且在每组仿真中均同时选择遍历法和遗传算法作为对照组。遗传算法的终止进化代数设为50,种群大小设为200。
在第1组仿真当中,令m从2~10以1为步进进行变化。其他参数,令n=10,各辐射源的权重wi随机生成,并令打击成功率pi与wi负相关。共进行100次重复独立试验,将所有重复独立试验的平均值作为最终结果。
图2给出了当目标辐射源数量变化时,采用3种方法生成的策略所对应的作战效能期望情况。可以看出,当目标辐射源数量变大时,作战效能的期望呈现递减趋势。这是由于在无人机数量确定的情况下,当目标数增大时,由于平均分配到每个目标上的无人机数不断减少,造成对每个目标打击成功概率减小,从而导致整体作战效能的持续降低。同时,由图2还可以看出,采用本方法与采用遍历法得到的全局最优策略的效能相同,证明了本方法所得到解的全局最优性。遗传算法得到的解的效能在辐射源数量较少时十分接近最优解,但随着辐射源数量的增大,与最优解之间开始出现差距。

图2 m变化时对应的作战效能期望
图3给出了当目标辐射源数量变化时,采用3种方法生成策略所需要的计算时间情况。在辐射源较少时,遗传算法所需要的计算计算时间远大于遍历法和本方法。随着辐射源数量的增多问题复杂度也随之增大,3种方法所需的计算时间均呈增长趋势。其中遍历法的增长速度最快并且逐渐超过了遗传算法,遗传算法和本方法的增长速度相对缓慢。总体而言,本文中的方法相较于其他2种方法的计算效率优势十分明显。

图3 m变化时对应的计算时长
在第2组仿真当中,令n从10~18以1为步进进行变化。其他参数,令m=10,各辐射源的权重wi随机生成,并令打击成功率pi与wi负相关。共进行100次重复独立试验,将所有重复独立试验的平均值作为最终结果。
图4给出了当集群无人机数量变化时,采用3种方法生成的策略所对应的作战效能期望情况。可以看出,当无人机数量变大时,作战效能的期望呈现递增趋势。这是由于在需要打击的辐射源数量固定的情况下,所使用的无人机数越多,能分配到每个目标上的平均无人机数也越多,从而提升了对各目标的打击成功概率,进而提升了整体的作战效能期望。在参数变化过程中,采用遍历法和本方法所得到的策略对应的效能期望始终相同,采用遗传算法得到的效能期望略低于其他2种方法,这说明采用遗传算法并不能得到全局最优解。

图4 n变化时对应的作战效能期望
图5给出了当集群无人机数量变化时,采用3种方法生成策略所需要的计算时间情况。可以看出随着无人机数量的增多,3种方法所需的计算时长均呈增加趋势,但遍历法增长速度明显高于其他2种方法。本文中的方法所需的计算时间在此次仿真中始终保持在1 ms以内,相较于2种对照方法中相对较优的遗传算法也有3个数量级以上的优势。
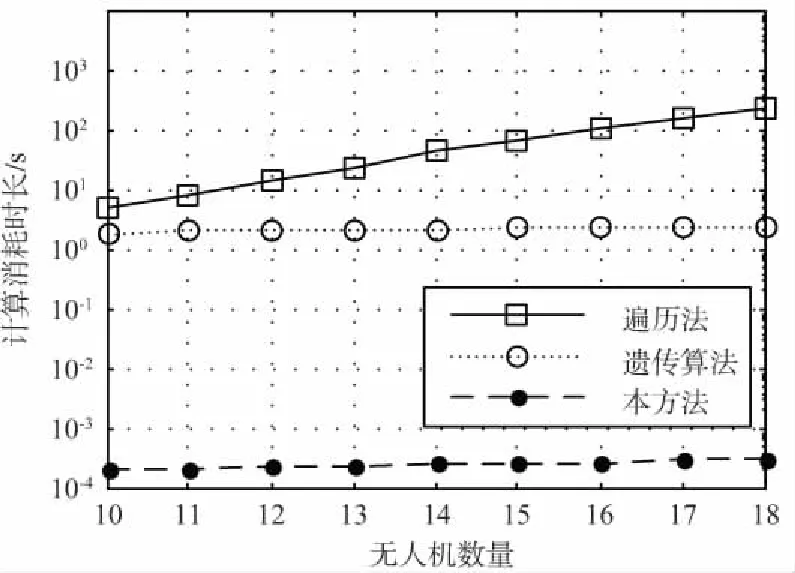
图5 n变化时对应的计算时长
通过上述2组仿真,可以看出本方法能够得出无人机集群执行反辐射打击任务时的目标分配问题的全局最优解,并且所需计算时间远小于遍历法以及遗传算法,随着场景规模的扩大,本方法在计算速度方面的优势变得越为明显,适用于规模较大的集群式作战场景。因此,本方法具备在无人机内部计算芯片上进行集成实现的条件,从而能够有效支撑无人机集群在任务执行过程中的目标动态分配。
3.2 典型场景分析
通过设计一种无人机集群执行反辐射任务的典型场景,利用仿真对比采用本方法进行静态和动态目标分配的效果。
仿真所选用的典型场景如图6所示,由n架无人机组成的集群从起飞点出发,经过突防通道抵达任务区对任务区内的敌方地面雷达进行反辐射打击。在无人起飞前,已知掌握到信息的目标数量为m,但在作战过程中又有L个新目标被发现。

图6 典型反辐射打击任务仿真场景
在仿真过程中,令L的取值从1~10以1为步进进行变化,其他参数,m=10,n=20,各辐射源的权重wi随机生成,并令打击成功率pi与wi负相关。对于L的每一种取值,均进行1 000次重复独立试验。所有重复独立试验完成后,取所有作战效能Q的均值作为最终结果。
为了进行对比,对同一场景分别使用静态分配和动态分配2种策略。静态分配策略是指在无人机起飞前完成对已知的m的作战目标的分配,在任务执行程中不再进行全局调整;动态分配策略是指在起飞前形成初始目标分配策略,在突防过程中若发现新的目标则重新进行全局目标分配。静态和动态的目标分配算法均使用本论文中的方法。
图7描绘了在战场新发现雷达数变化时,采用动态和静态目标分配策略所取得的作战效能平均值变化情况。

图7 动态/静态策略作战效能对比(绝对值)
可以看出,随着战场新发现雷达数的增加,无论是采用静态分配还是动态分配策略,最终的集群作战效能均呈下降趋势。这是因为任务总目标变多时,无人机数量并未增大,平均到每个目标上的无人机数量降低,降低了将目标实际摧毁的概率,造成最终的任务完成情况不断变差。在2种策略当中,由于动态分配能够根据战场雷达数量的变化,从全局优化的角度重新分配各无人机的作战目标,故而其实际作战效能始终大于采用静态分配方法的效能。
图8描绘了在战场新发现雷达数变化时,动态/静态策略作战效能对比。可以看出,随着战场新发现雷达数的增加,采用动态策略的作战效能与采用静态策略的作战效能之间的比值不断增大,即动态策略的效能优势随着战场新发现雷达数的增大而增大。因为战场新发现雷达数越多,最终的真实打击场景与战前预期的差异也越大,造成了静态分配策略对最终真实打击场景的适应性不足,进而造成静态分配策略的作战效能快速下降。

图8 动态/静态策略作战效能对比(相对值)
4 结束语
本文针对反辐射无人机集群在执行对多个辐射源目标的打击任务时的目标分配问题,建立了问题的数学模型,采用“贪心法”提出了一种可获得全局最优解的目标分配策略方法,并对该方法的全局最优性进行了数学证明。通过计算机仿真,验证了该方法与通过遍历法获得的全局最优解的一致性,同时在计算效率上相较于经典的次优算法——遗传算法有明显的优势,从而使得该方法具有在计算资源有限的无人机内部芯片上实现的可行性。仿真结果同时显示了基于本方法对作战目标进行动态分配能够有效地提升集群作战任务的效能,相较于静态目标分配是一种更优的目标分配策略。
本文进行问题建模时只考虑了反辐射打击任务的完成情况,未考虑与之相对应的无人机开销。在后续的研究中,将考虑为实现给定作战效能所应使用的最少无人机数等问题,从而提供更为贴近实战的理论成果。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
北京航空航天大学学报(2020年10期)2020-11-14 09:26:16
雷达学报(2018年5期)2018-12-05 03:13:16
雷达学报(2018年3期)2018-07-18 02:41:20
石油地球物理勘探(2017年2期)2017-11-23 06:02:04
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:32
统计与决策(2017年2期)2017-03-20 15:25:24
电子设计工程(2017年20期)2017-02-10 03:39:23
智能系统学报(2015年4期)2015-12-27 09:38:39
机电信息(2015年9期)2015-02-27 15:55:56