
农业机械智能化设计技术发展现状与展望
2019-10-10 02:45杜岳峰傅生辉毛恩荣朱忠祥
农业机械学报 2019年9期
杜岳峰 傅生辉 毛恩荣 朱忠祥 李 臻
(中国农业大学现代农业装备优化设计北京市重点实验室, 北京 100083)
0 引言
在当前工程设计从传统的数据资源密集型向知识信息密集型转化的背景下,新产品设计逐渐向智能化、集成化、虚拟化、网络化、全球化方向发展。以信息处理为主的智能化设计,能够满足多样化、定制化市场需求,避免大量重复工作,缩短研发周期,增强产品竞争力,已广泛应用于航空航天[1]、汽车[2]、船舶[3]、机床[4]等先进制造领域,被誉为“面向21世纪的先进设计技术”。
相比之下,农业机械产品设计的智能化程度与上述领域还存在较大差距。具体而言,农业机械产品具有种类繁多、作业环境复杂、工况多变、使用季节性强、配置需求多样、单产品市场需求规模小等特点,其智能化设计是一个知识密集的复杂过程,涉及机械设计、农机农艺、CAD/CAE/CAM(Computer aided design/Computer aided engineering/Computer aided manufacturing)、人工智能与知识融合、知识管理和网络协同仿真等多领域的技术和方法。近年来,国际农机企业间竞争愈发激烈,为提升产品研发效率,抢占市场先机,如约翰迪尔(John Deere)、凯斯纽荷兰(CNH)、爱科(AGCO)和久保田(Kubota)等国外知名企业应用各种自动化及信息技术手段,纷纷建立了以PDM/PLM(Product data management/Product lifecycle management)为支撑的产品研发体系和知识积累平台。虽然我国农业机械产量稳居世界第一,但国内企业正面临来自目标市场多层面竞争的严峻挑战。当前以跟踪和仿造国外产品为主的研发模式明显存在设计周期长、效率低、设计可靠性差等问题,导致企业核心技术自主知识产权水平普遍偏低,企业竞争力不强,单纯依靠国内农机补贴政策无法保证农机企业的可持续发展。
《中国制造2025》明确指出,农业机械制造业发展的重点任务就是加强行业技术标准体系、行业信息化数据服务系统、行业试验检测能力、产品数字化设计平台建设,推动数字化、智能化、清洁生产、虚拟制造、网络制造、并行制造、模块化、快速资源重组技术的应用。《农业机械发展行动方案(2016—2025)》也明确要求,加强重点关键技术攻关,推动数字化、智能化等先进技术与农业机械制造技术的深度融合,促进我国由农机制造大国向制造强国转变,显著提高农业机械有效供给能力。
本文在分析国内外智能化设计技术发展现状基础上,重点分析当前农业机械智能化设计技术的研究热点,阐述归纳用户需求描述和分析、产品模块化设计、计算机辅助设计建模技术、知识工程(Knowledge based engineering,KBE)、虚拟仿真与虚拟试验验证、基于PDM/PLM的协同设计等相关技术在农业机械智能化设计方面的典型应用,并在此基础上,结合我国农业机械设计现状,展望农业机械智能化设计未来发展趋势,以期为我国农业机械设计制造提供参考。
1 智能化设计技术概述
1.1 智能化设计
智能化设计是结合KBE和计算机辅助设计理论的现代设计方法,旨在通过对设计人员在设计活动中的认知和行为特征的模拟,使设计系统能够运用丰富的知识(如专家经验、设计手册、标准、行业规范等)进行推理、判断、决策,实现产品设计的定制化、自动化、智能化[5]。
1.2 智能化设计特点
以现代设计理论和方法为指导,以知识为依托、以人工智能技术为实现手段、以传统CAD技术为数值计算和图形处理工具,以设计自动化为目的,是当前智能化设计的显著特点。具有专业领域知识库、可利用知识求解相关设计问题、具备协调数据库和图形库等多种资源的能力,是当前智能化设计系统与传统CAD的根本区别。
随着大数据、智能制造、并行工程、虚拟现实技术(Virtual reality,VR)、多领域协同仿真技术(Multi-domain co-simulation, MDCS)等概念的兴起,智能化设计正向更高层次的自动化方向发展,以支持大规模的多学科、多领域知识集成。未来智能化设计技术将重点突出“以人为本”的设计思想,强调网络及分布式数据库环境下的多个独立智能体(Agent)协同合作,实现产品设计集成化、并行化、协同化和网络化。
产品设计过程实质是一个反复决策过程,包括用户需求评估、设计过程决策、技术问题决策和评价性决策,而在决策过程中,用户需求的模糊性、设计空间的约束性、设计过程的复杂性、设计结果的多样性及其相对准确性,使智能化设计系统存在不同于其他智能系统的特殊困难,具体如下:
(1)用户明确需求及隐性需求的正确描述及有效分析,即从市场需求、同业竞争力、企业现状等多方位综合评估分析,深入挖掘产品设计与用户需求之间的转换和映射关系,实现产品的定制化生产。
(2)设计任务的合理分解及其子任务之间相互关系的正确描述,即如何将产品的决策空间恰当地分为决策子空间,使有关决策在相应的子系统内有效进行,并实现决策结果的自动整合,以适应任务的多层次性和多目标性。
(3)如何充分表达各种异构知识及构建拥有良好组织结构知识库,对不同类型的知识和数据进行合理的表示、分类、组织和管理。
(4)高效的知识推理机制及产品再设计的集成,即如何针对设计问题特点和知识表现形式,采用相应的推理机制提高知识的重用率和利用率,并可根据再设计知识确定回溯点和相应参数的修改,实现产品再设计。
1.3 智能化设计技术体系
分析农业机械产品及设计特点,综合运用知识工程原理及数字化建模、虚拟仿真和虚拟试验验证技术;基于PDM/PLM、集成CAX等通用软件,构建基于知识的农业机械智能化设计通用基础平台;通过指导产品设计,形成智能化设计标准规范和框架体系,如图1所示。
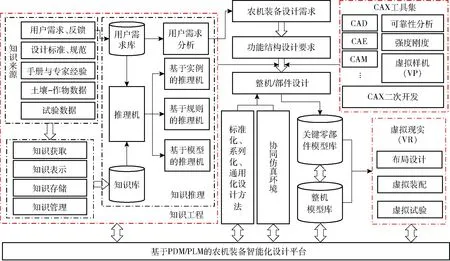
图1 农业机械智能化设计技术体系Fig.1 Intelligent design technology system of agricultural machinery equipment
2 农业机械智能化设计关键技术
将农业机械智能化设计关键技术重点概括为用户需求分析、模块化设计、计算机辅助设计建模技术、知识工程、虚拟仿真和虚拟试验验证、基于PDM/PLM的协同设计等6方面,并对其技术发展现状进行深入分析。
2.1 用户需求描述与分析
用户需求(Customer requirements,CRs)通常具有明显的特性,如多样性、层次性、动态性、模糊性、优先性等[6]。在当前竞争激烈的农机市场,农机企业越来越注重设计出用户满意度高、价格低的产品,如何对用户需求进行有效分析,为优化产品设计提供决策支持,是农业机械制造业当前迫切需要解决的问题。
一般通过分析、数据挖掘和预测等方式满足用户需求,实现农机产品的定制化设计。Kano模型[7]和产品质量功能配置模型(Quality function deployment,QFD)[8]是用户需求描述和分析的典型代表。其中,Kano模型是一种对CRs分类和优先排序的有用工具,其特点是将用户需求分为五大需求,如图2所示,通过标准化的问卷调查解决产品属性定位问题,以提高用户满意度。QFD是一种用户需求驱动的产品设计开发方法,代表了从传统设计方法向现代设计方式的转变,其核心技术产品质量屋(House of quality,HOQ)采用矩阵图解方法建立用户需求和技术需求之间的关系,如图3所示。
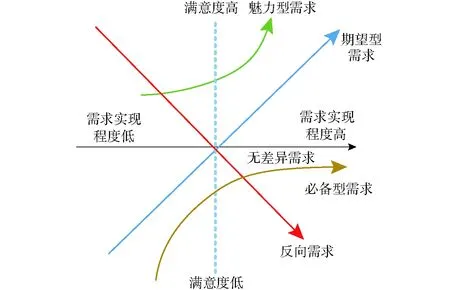
图2 Kano模型的五大需求Fig.2 Five requirements of Kano model

图3 QFD产品质量屋基本结构图Fig.3 Structure diagram of house of quality
对于CRs的描述和分析,JIN等[9]针对竞争性产品的在线评论,提出了考虑信息的代表性、可比性和多样性的优化问题,并利用3种贪婪算法进行最优求解,实现客户关注产品的细粒度级别分析。WANG等[10]提出了基于朴素贝叶斯方法来描述客户的技术功能需求和主观偏好,并根据具体属性和设计参数进行映射。张宇博[11]提出一种Kano模型改进下基于交互式遗传算法(Interactive genetic algorithm,IGA)的产品配置决策方法,从产品定制属性的有效识别和合理设置角度出发,进一步降低产品定制过程中的复杂性,优化设计体验。KAHRAMAN等[8]提出一种集成模糊QFD和模糊ANP的产品设计模型,以确定产品设计中需考虑的技术要求。利用模糊理论求解用户需求重要权重已成为解决用户需求不确定性的重要手段。
为解决传统Kano模型和QFD模型的固有不足,JI等[12]和HE等[13]将Kano模型的定性和定量结果用非线性规划模型集成到QFD中,从而在企业满意度和客户满意度的最佳平衡下,实现最优设计方案。PAKIZEHKAR等[14]通过整合Kano模型、AHP和QFD实现了客户需求的识别和优化。此外,引入公理化设计(Axiomatic design, AD)理论等现代设计方法实现用户需求与设计参数之间的映射转化也是当前的研究热点之一,如ASHTIANY等[15]利用AD理论,结合QFD和生态设计理念,实现了Beech Baron 58轻型双引擎飞机的再设计。AD理论通常由客户域、功能域、物理域和工艺域等4个域组成。利用两条设计公理和若干定理及推论实现域之间的映射,完成从抽象到具体的设计过程。杨汝静[6]集成AD和QFD实现了机床方案设计需求信息的功能转化,为数控机床的实例检索提供了依据。DU等[16]提出了基于AD理论和QFD模型的面向重用的旧产品再设计方法。
此外,国内外学者也对用户需求建模和集成知识的需求描述进行了探索。SIM等[17]提出了基于本体角色驱动的用户需求模型;SINGHAPUTTANGKUL等[18]开发了一种基于模糊知识的决策支持系统质量功能自动部署(KBDSS-QFD)工具,以解决高层住宅设计早期的评估决策问题。ZHAI等[19]提出了一种基于粗集理论的改进模糊QFD方法的新扩展,建立基于QFD的产品设计专家系统,提高了设计目标的可辨性。
综上,用户需求研究主要集中在基于集合理论、本体理论等方法的需求描述和基于模糊理论的需求转化映射等方面。当前基于用户需求的设计面临以下问题:
(1)用户需求的一致性描述
为了快速提高用户需求的标准化程度,保证CRs设计过程的准确性和一致性,需要从时间维度、过程维度、空间维度等方面建立多层次的用户需求模型。
(2)预测和挖掘用户需求
云计算和人工智能的兴起,使得通过互联网和物联网收集用户数据成为可能,从海量数据中挖掘用户行为模式和使用习惯,预测CRs,确定隐藏需求已成为分析CRs的重要手段。
(3)用户需求的转化和映射
为保证CRs到工程技术特征转换的一致性、准确性和时效性,需要建立用户域到功能域的转换模型,包括动态的、模糊的以及隐性的CRs。
2.2 农业机械模块化设计
模块化设计是在产品功能分析基础上,划分并设计出一系列功能模块,通过模块的选择和组合,构成不同产品,以满足用户定制需求[20]。研究发现,对于农业机械这种具有特殊要求的复杂产品,应用现有技术,在共性单元归并形成模块方面,尚不能得到有效解决,产生的模块适应范围较小,且数量偏多,不能充分发挥模块化设计的优势[21]。因此,针对农业机械模块化设计,国内外相关研究主要集中在模块划分(识别)和模块优化与评价方面。
2.2.1模块划分方法
目前,常用的模块划分方法可大致分为启发式、聚类式和其他方法。其中,启发式方法根据不同的工程应用背景构建数学规划模型,并采用启发式算法获取最优模块划分方案,其求解过程如图4所示。一般启发式方法主要应用启发式遗传算法、基于约束的遗传算法、组合编码遗传算法、混合多目标蛙跳算法等[22-24]。罗石林[25]通过计算零部件间的关联度建立了山地农机设计结构矩阵(Design structure matrix,DSM),分别运用遗传算法和遗传模拟退火算法,实现了山地农机产品的模块化处理。
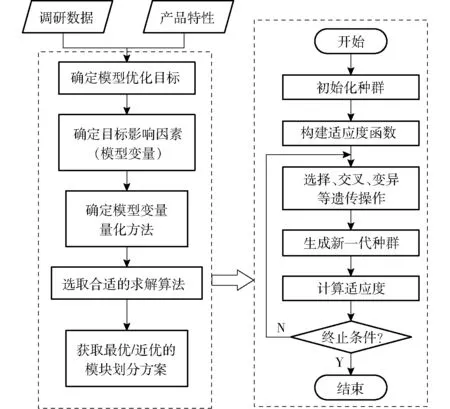
图4 启发式方法的一般框架(以遗传算法为例)Fig.4 General framework of heuristic module partition approach (GA)
聚类式方法利用设计矩阵、图论、复杂网络等方法对产品元素的拓扑关系进行形式化表达,并利用聚类算法实现零部件成组/聚类的模块划分,其一般求解过程如图5所示。常见的方法有两种:基于DSM聚类的模块划分方法和基于图论的模块划分方法[26-28]。ALGEDDAWY[29]采用网格理论和DSM矩阵编制模块化代码。KUSIAK等[30]以图论为工具表达零部件间的各种物理连接关系,采用定性的启发式规则实现了模块化组件的识别,并尝试采用模糊神经网络算法探索产品性能和成本之间的平衡点。
研究发现,启发式方法极易陷入局部最优,而基于DSM和图论的聚类式方法,其矩阵变化过程和聚类过程极其复杂,不适合复杂产品的模块划分,因此,部分学者尝试通过多种方法集成实现复杂产品的模块化设计。其中,SCHUH等[31]提出一种面向高度集成机电产品的模块化产品平台(Modular product platforms,MPP)设计方法,该方法应用扩展的AD理论将复杂系统分解为机电一体化功能模块(Mechatronic function modules,MFM),确保开发过程中的功能导向,并将MFM用于产品平台设计。
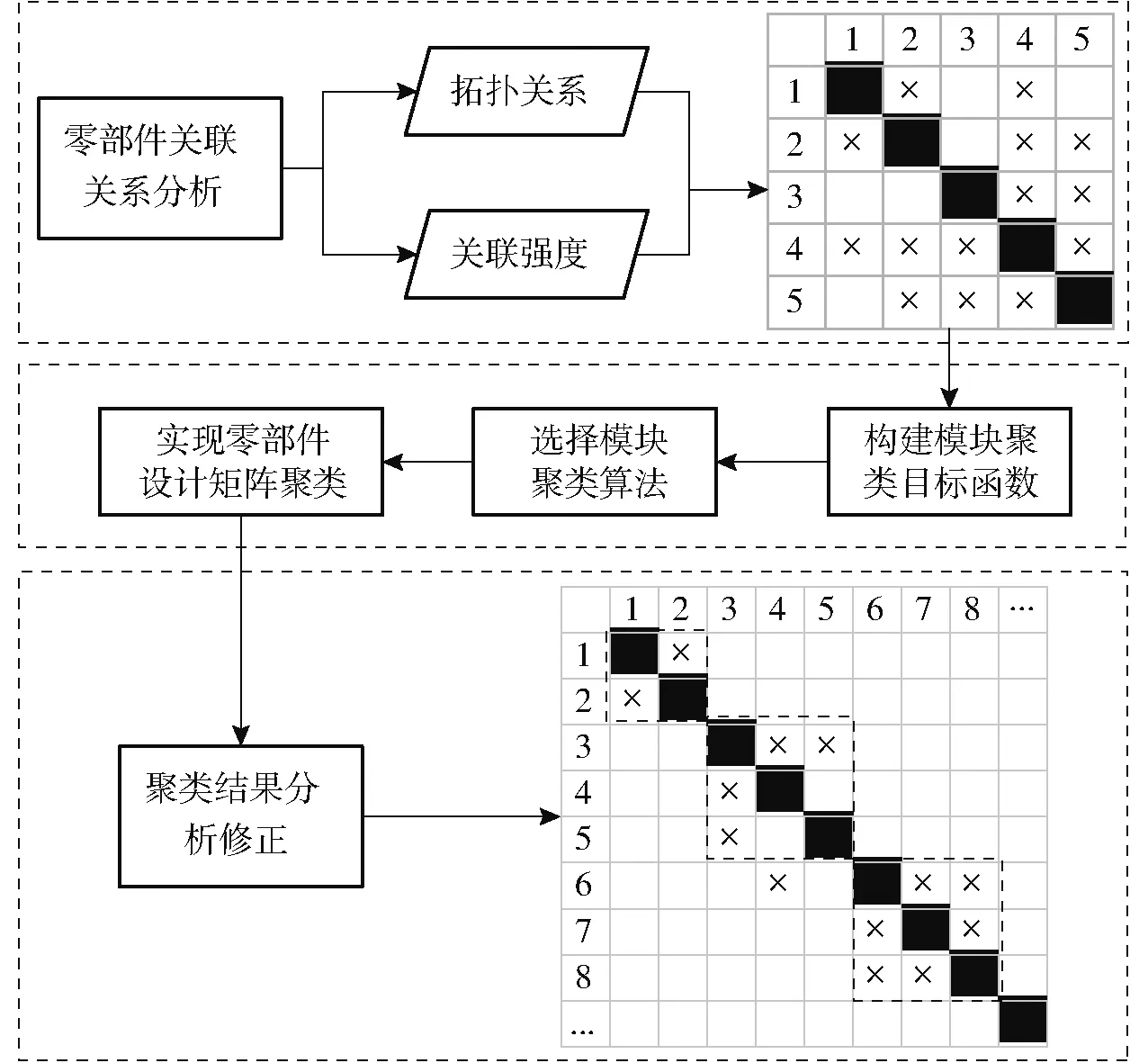
图5 聚类式方法的一般框架(以DSM为例)Fig.5 General framework of clustering module partition approach (DSM)
依据模块划分标准可将模块划分方法分为基于功能的方法、基于功能和结构的方法和基于产品生命周期的方法。为此,本文对当前常见的模块划分方法进行总结归纳,如表1所示。
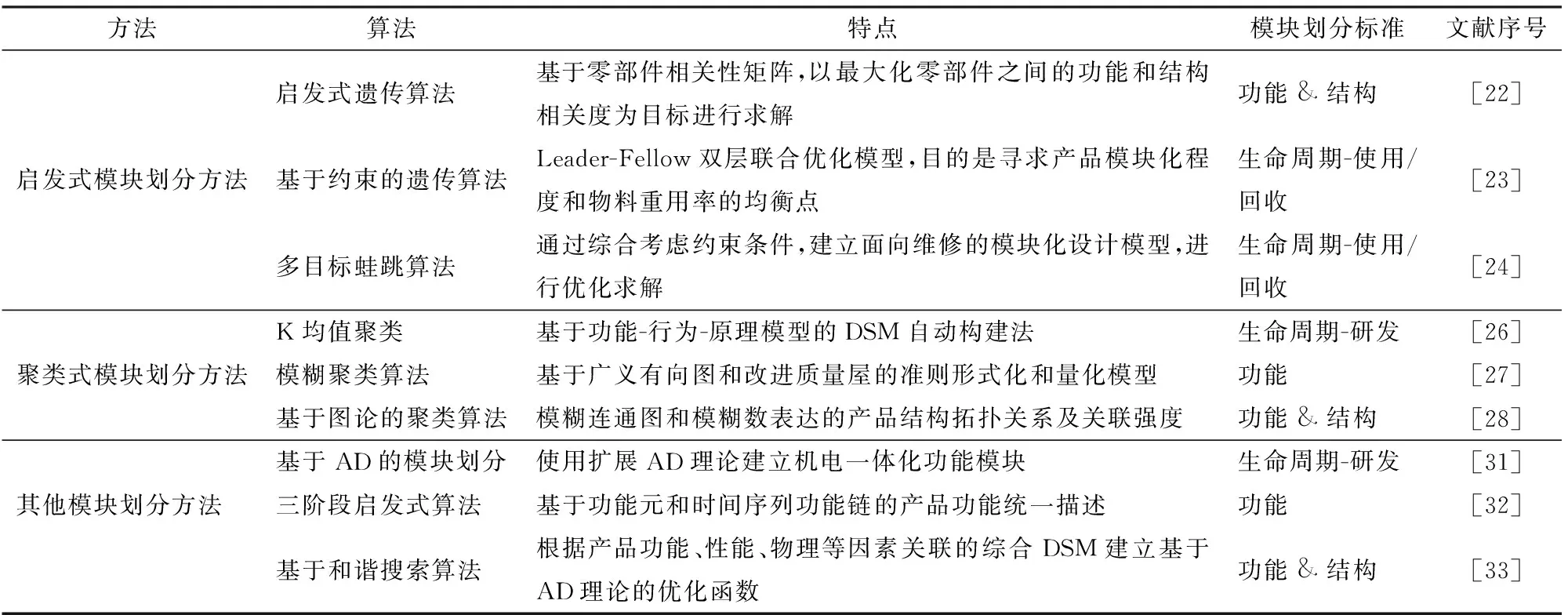
表1 基于模块划分标准的模块划分方法分类Tab.1 Classification of module partition methods based on module division standard
2.2.2模块化方案优化与评价
产品模块化划分方案并不唯一,不同模块化方案对应不同的模块度。ULRICH[34]对模块度的概念和内涵进行了初步探讨。SOSA等[35]提出了基于图论和社会网络的3种零件模块度的度量方法。FUJITA[36]从属性、模块、系统3层次研究模块化产品族优化问题,提出产品族优化要考虑并平衡模块和生产过程中的各种因素,建立系统成本结构,以系统运行总成本为优化目标。罗石林[25]提出了基于编码加权计算的模块相似度评价方法,并应用于山地农机扶手架设计。
综上,农业机械作为一种复杂、异质性产品系统,其模块化设计支持理论及应用技术还相对匮乏,模块化设计在农业机械领域中的应用仍存在一定的不足:
(1)农业机械零部件与功能之间通常具有显著异质性、零部件数量巨大、零部件间的耦合强度高等特点,因此,在进行模块划分时,要对其异质的功能和零部件进行同质化约简,剔除冗余功能和零部件。另外,由于农业机械零部件的多维复杂性,需充分考虑产品生命周期各环节的影响,实现模块划分方案的多属性评价。
(2)考虑客户需求及设计知识支撑的系统模块参数规划问题。模块化设计要形成完善的应用体系,除实现模块划分之外,还应对模块的主参数进行设计,包括模块接口标准、主参数的取值范围、取值个数等信息,合理的模块规划对满足用户需求和提高变型设计具有重要意义。
2.3 计算机辅助设计建模
当前CAD建模主流技术是以PTC Creo为代表的参数化建模技术和以SDRC I-DEAS Master Series为代表的变量化建模技术,广泛应用于农机产品的数字化设计[37]。RIESENFELD等[38]认为,现有的CAD系统与支撑整个工程设计的最初设想背道而驰。不必要的人为干预、异构CAD系统信息共享、CAx的集成是阻碍高效设计的关键因素。针对现有CAD系统建模技术的不足,国内外学者开展了广泛深入的研究。
(1)基于统一建模思想的CAD建模技术
常见的产品模型数据交换标准如DXF、IGES、ESP、PDES、VDAFS以及早期的STEP等只能传递显式边界表示实体模型,而无法支持几何构造历史、参数、特征、约束等设计意图的完整传递。为此,MUN等[39]提出了一套基于历史的参数化建模方法的标准命令,通过宏命令交换CAD模型。LI等[40]提出了一种实现异构CAD系统互操作性的参数化数据交换方法,并将该方法应用于TransCAD和AVEVA Marine的数据交换。虽然基于中性文件和标准的方法可以实现产品模型信息和建模过程的有效交互,但这些方法只考虑产品模型中的几何信息。为了实现非几何描述建模,FENVES[41]开发了一种描述产品信息的核心产品模型(Core product model,CPM)。CPM的关键对象是制成品,制成品是一个独立实体,通过功能、结构、行为3方面描述其属性。新一代CPM在概念、中间、应用模型3个不同层级上描述广泛的产品生命周期信息,而且CPM的扩展已包括开放的装配模型、产品语义表达语言、设计分析综合、产品族进化模型、混合材料模型等,涵盖产品建模的各个方面[42]。
此外,基于统一建模语言的CAD建模技术或将从根本上改变异构CAD系统的数据交换难题。常见的统一建模语言包括:面向对象建模语言(Object-oriented modeling language,OOML)和基于本体的建模语言(Ontology-based modeling language,OBML)。其中,OOML以STEP标准的EXPRESS及其图形表示格式EXPRESS-G、统一建模语言(Unified modeling language,UML)为主。SEKARAN[43]基于UML设计了一种基于多智能Agent的复杂系统开发框架。XUE[44]在基于特征的产品建模语言(Feature-based product modeling language,FBPML)基础上,提出了一种分布式的基于特征的产品建模语言(Distributed feature-based product modeling language,DFBPML),用于对不同位置的类特征和实例特征进行建模,并将这些特征关联到一个集成环境中。而对于基于本体的建模语言,应用最广泛的是本体Web语言(Ontology web language,OWL)。BOCK等[45]将本体与模型相结合的技术用于协同设计,开发了本体产品建模语言(Ontology product modeling language, OPML)。在该方法中,产品模型被视为基于模型体系结构中整体系统的本体类型。BARBAU等[46]提出了OntoSTEP模型,用于STEP数据与OWL数据的转换。PANETTO等[47]开发了一个公共核心模型——产品驱动的产品数据管理本体(Product-driven ontology for product data management,ONTO-PDM)。该模型通过现有标准的概念化提供以产品为中心的信息模型,然后将其形式化为产品本体。
(2)基于知识的CAD建模
智能化设计的实现依赖于设计知识的高效利用,尤其在CAD建模方面,设计知识与建模过程的融合,有利于提高模型的灵活性、适应性和可重用性。CAD模型的设计知识包括标准规范、尺寸约束、材料特性、装配语义等显性知识和设计意图等隐性知识。IYER等[48]对二维CAD中的设计意图进行了定义,指出“CAD设计意图是对设计变量(设计目标、约束、备选方案、演变、指南、加工指令和标准)的洞察,这些变量隐含在几何结构、材料特性、维度实体和文本实体之间的结构、语义中”。XUE等[49]开发了一种基于NIST CPM的面向并行工程的设计数据库表示模型(CE-DDRM),将设计知识描述为元类层、类层和实例层3个不同的层次。REDDY等[50]提出了基于知识的参数化CAD设计系统,该系统利用KBE技术将AGMA规则应用于直齿圆柱齿轮的CAD参数化建模。此外,REDDY等[51]还开发了一种基于Web的CAD建模与制造知识系统,旨在寻找能够及时、高效地生成CAD模型和CNC代码的方法。GUJARATHI等[52]提出了一种集成CAD和CAE参数的通用数据模型(Common data model,CDM),通过将嵌入式工程概念、专家知识和设计标准编程到原型软件包,自动创建CDM模型,利用商业化的CAD/CAE API接口,以最少的用户界面实现产品开发的自动化。
(3)基于模型的定义
基于模型的定义(Model-based definition,MBD)是一种面向计算机应用的产品和制造过程数字化定义技术,实现了基于知识的CAD模型全面可视化,如图6所示,旨在创建丰富的技术数据包(Technical data package,TDP),其中包含3D模型、性能要求、产品制造信息(Product manufacturing information,PMI)、包装信息等数据元素,可充分定义产品,确保上下游客户都能够有效地对其进行沟通和使用,从而避免了以2D工程图纸为基础的传统制造方法所产生的诸如协作障碍、信息丢失、理解偏差等问题,提高了设计知识的利用效率和模型的可重用性。
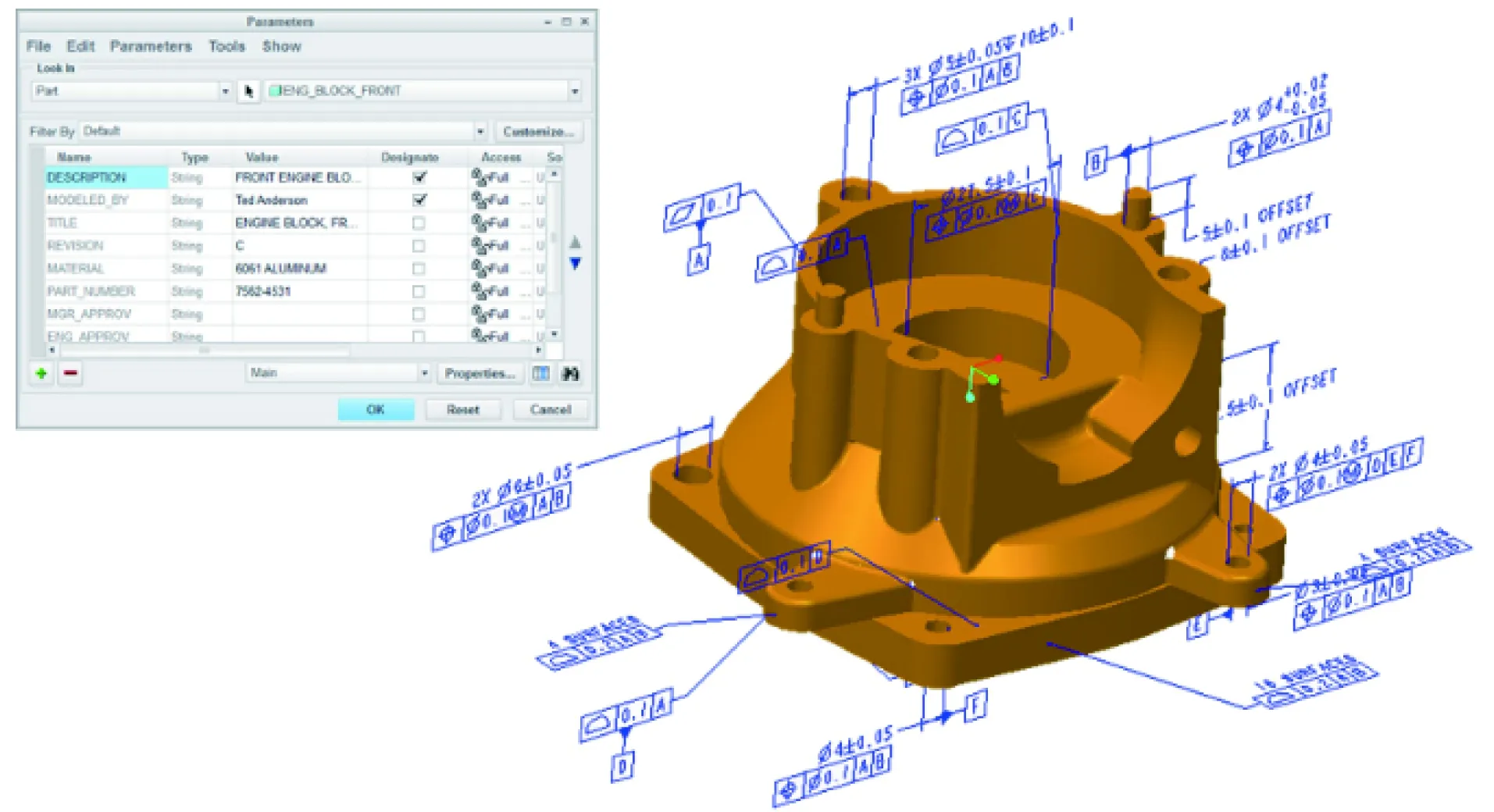
图6 基于MBD技术的三维零件模型Fig.6 3D parts model based on MBD
当前,北美和欧洲等地区的MBD技术应用相对成熟[53]。但MBD在产品数据交换、用户使用习惯、系统集成等方面仍有许多局限性,因此,国内外学者进行了广泛研究。QUINTANA等[54]分析了产品全生命周期管理中存在的问题和解决方案,尤其是MBD技术的实现,并总结了MBD在制造过程中的优势。ALEMANNI等[55]提出了一种包含MBD技术的PLM产品全生命周期管理解决方案,并在某航天器案例中,实现了基于MBD的复杂产品建模。ZHU等[56]提出了一种基于MBD和PLM的集成设计制造系统整体实现方法。西门子NX、DS CATIA、PTC Creo 4.0等商用CAD软件均推出了各自的MBD技术,允许设计人员在3D模型中标注GD/T信息。
MBD技术在中国的应用还相对较少,在波音公司的影响和要求下,波音公司的中国零部件供应商逐渐开发了一些基于MBD的零部件3D模型。为满足“三维模型下车间”的技术需求,中国航空工业最早开展了一些基于MBD的技术研究,基于CATIA、NX、Creo等产品的全三维设计模型规范不断完善,应用水平不断提升,广泛应用于飞机、卫星、火箭以及其他典型航空航天产品的设计与制造领域。基于MBD的产品协同设计与智能制造已成为先进制造领域的必然趋势,但尚未出现基于MBD的农业机械设计相关研究的报道。
2.4 知识工程技术
知识工程是源于专家系统而形成的一个研究领域[57]。对智能化设计而言,KBE技术贯穿整个设计过程,但农业机械设计有别于一般的产品设计,具有领域性强、研究范畴和具体应用多样的特点,当前KBE技术在农业机械智能化设计中的应用主要包括知识表示、获取和推理。
2.4.1知识表示
农业机械知识通常具有模糊性、复杂性、层次性和耦合性特点。除一般机械设计知识外,农业机械的设计知识主要来源包括标准和规范、设计师、领域专家、试验、理论和分析、用户反馈等。根据知识能否清晰地表述和有效的转移,可分为隐性知识和显性知识。其中,显性知识包括经验参数类、公式类、国家标准、整机和关键零部件设计实例等结构化知识,隐性知识则属于设计经验、情感认知等难以形式化表达的知识。
知识表示方法很多,如表2所示,但知识表示的统一性、普适性和一致性较差,而且难以实现隐性知识、不确定知识的表达[58]。近年来,关于农业机械的知识表示研究相对较多,对于显性知识,通常将几种知识表示方法组合使用,以增强知识表示能力。
李长林等[59]系统研究了高速插秧机底盘设计知识的表示方法,利用产生式规则表示底盘公式类、经验参数类等规则知识,同时采用框架表示与面向对象法相结合的方法表示实例知识。陆凤祥等[60]也提出了基于本体的拖拉机变速器知识混合表示方法。而隐性知识是多年学习和经验的积累,对产品设计具有重要指导意义。对于隐性知识,QIN等[61]提出了一种“需求-功能-行为-结构-演化”(Requirement function behavior structure evolution,RFBSE)知识表示模型,用于获取有用的设计知识和经验。LIU等[62]对模糊Petri网络表示方法及相关改进技术进行了详细的总结评价,指出了其在隐性知识表达和模糊推理方面的应用前景。WU等[63]提出了一种基于语义超图的知识表示框架,以支持产品开发中的知识共享。LIU等[64]提出了一种通用模糊知识的本体表示方法,对语义网中模糊知识表示具有重要意义。

表2 常用知识表示方法比较Tab.2 Comparison of common knowledge representation methods
综上可知,显性知识已经有了很好的表达方式,而隐性知识结构化的映射方式并不唯一,基于几何属性、组合和继承方式的启发式方法确定工程本体的映射仍是当前研究的重点。基于本体理论,融合多种知识表示方法实现农业机械设计知识的有效表达是未来发展趋势。
2.4.2知识获取
在KBE中,知识库的知识量已成为制约其发展的瓶颈,因此,知识自动获取技术受到国内外学者的重点关注。分析已有文献发现,目前的知识自动获取研究具有以下两个显著特点:
(1)基于数据库的知识发现(Knowledge discovered in database,KDD)技术。KDD技术将数据中隐含的模型或模式以易于被人理解的形式表现出来。根据数据挖掘方法,KDD可分为:机器学习方法、统计方法、神经网络方法、遗传算法、数据库方法、近似推理和不确定性推理方法、粗糙集理论、基于证据理论和元模式的方法、集成方法等[65]。如,麻芳兰[66]采用模糊理论、神经网络、粗集理论集成方法,获取甘蔗收获机仿真分析和试验数据中的隐性知识。李长林[67]综合运用粗糙集理论和回归分析算法,提取了收割机总体设计参数知识。
(2)基于本体建模的知识获取。虽然基于智能算法的KDD技术发展迅速,但知识的进一步集成却受到了知识表示方法的制约。WIELINGA[68]认为,基于上下文语境的语义Web是知识获取技术最有前途的研究方向,但也是获取形式化知识最困难的来源,因此,本体论与知识获取技术的结合成为当下知识自动获取的研究热点。CHEN等[69]开发了一种基于本体建模的知识获取方法和需求驱动的知识获取系统。CHERGUI等[70]提出一种基于本体的隐性知识获取方法,通过“过滤和显化—结构化—模型重建—本体填充”四步实现隐性知识的获取,如图7所示。

图7 隐性知识获取模型Fig.7 Tacit knowledge acquisition model
2.4.3知识推理
知识推理是根据一定的设计原则,从已知判断得出新判断的思维过程。从推理方法上,可将知识推理分为:基于规则的推理(Rule based reasoning,RBR)、基于实例的推理(Case based reasoning,CBR)和基于模型的推理(Model based reasoning,MBR),其优缺点比较如表3所示。
对于农业机械设计而言,知识的复杂性决定了单一推理模式无法满足农业机械设计的需求,因此,集成多种推理方法的混合推理技术是实现知识重用、支撑农业机械智能化设计的主要手段。
李长林[67]系统研究了基于知识的农机专业底盘快速设计系统,提出了基于CBR和RBR的集成推理技术。宋正河等[71]在综合分析履带式收获机械传动系统设计流程和设计知识特点的基础上,建立了集成CBR和RBR的混合推理机制,并开发了相应推理系统。惠为东[72]将基于CBR-RBR的混合推理技术应用到拖拉机制动器智能化设计系统,实现了制动器分层实例检索、匹配及基于规则的实例修改。LI等[73]提出了一种基于MBR的产品模块化检索方法,该方法在相对信息不完整的情况下,利用MBR间接搜索产品最相似模块作为最佳解决方案,并通过AD理论和TRIZ理论再设计完成产品的模块化设计。COSTA等[74]提出了产品范围模型(Product range model,PRM)概念,该模型将基于规则的系统和基于案例的推理结合起来,为产品设计提供决策支持。
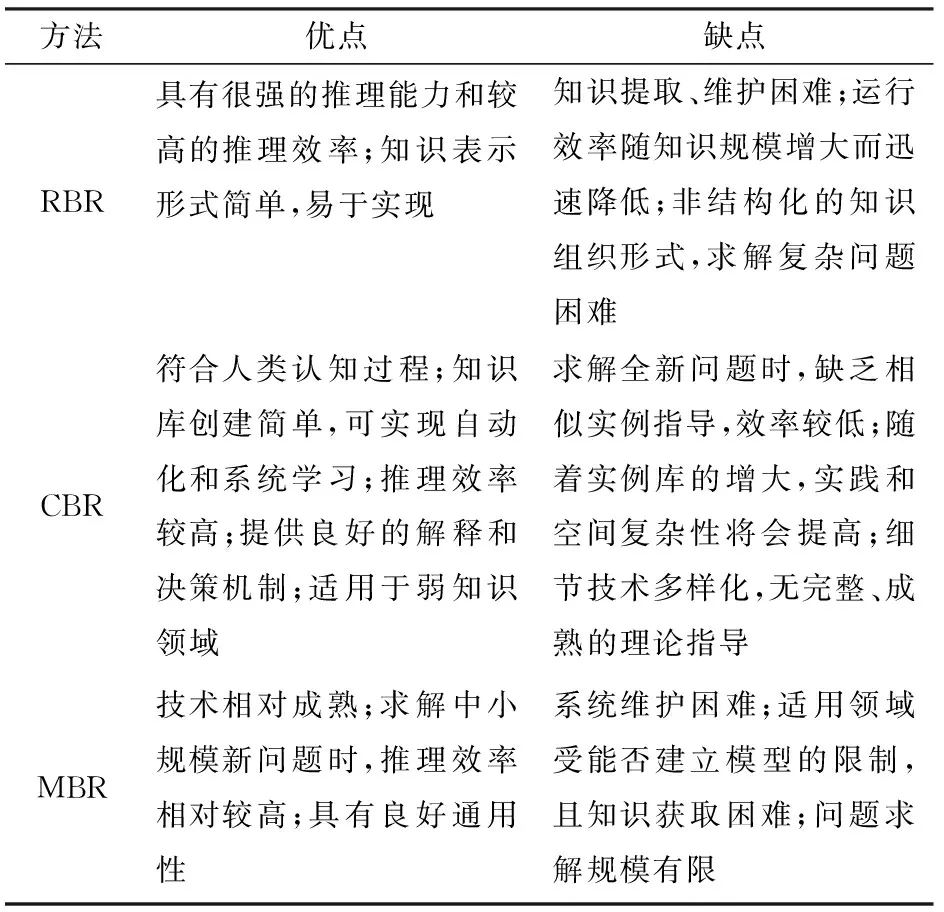
表3 常用推理方式的比较Tab.3 Comparison of common reasoning methods
虽然在推理方式上,各种推理机制的集成弥补了单一推理模式的不足,有利于问题求解,但推理机制的检索策略、决策模型、修改方式等算法的选择和应用是影响推理结果的关键因素,因此,优化推理机制的核心算法,提高推理准确性和推理效率仍是当前农业机械智能化设计系统实现知识推理、重用研究的关键。
2.5 虚拟仿真与虚拟试验验证
2.5.1虚拟仿真在农业机械中的应用
农业机械融合生物和农艺技术,是集成先进制造与智能控制、新一代信息通信、新材料等高新技术的先进装备。农业机械仿真是一个涉及农学、机械、电子、液压、控制等多领域、多学科交叉耦合的协同分析过程。现有的仿真工具虽然可以解决大部分单领域仿真问题,但难以满足复杂条件下农业机械多系统、多物理场耦合的仿真需求,因此,基于土壤-植物-机器体系的复杂农业机械多领域仿真分析已成为当前研究的重点和热点。
(1)面向对象的多领域统一建模
多领域协同仿真实现了多物理场仿真子系统的集成,各子系统间有不同程度的约束和交互,难以实现完全解耦。相比基于接口技术和高层体系结构(High level architecture,HLA)的建模方法,基于统一建模语言的方法实现了各领域仿真模型的无缝集成和数据交换,具有可重用性和扩展性优势,逐渐成为多领域建模仿真的主流[75]。
面向对象的多领域统一建模源自Elmqvist论文提出的Dyloma建模语言,受其影响,先后涌现出一大批类似的统一建模语言,如Omola、ObjectMath、ASCEND、Allan、Smile等。面对这种混乱局面,欧洲仿真协会EUROSIM于1996年推出了多领域系统统一建模语言——Modelica,因其面向对象和基于方程的非因果关系建模特点,模型的重用性得到了较大提升,广泛应用于航空航天、汽车、电机控制、电液控制等领域[76]。
在农业机械仿真领域,基于Modelica语言的仿真应用较少。邹湘军等[77]提出了基于Modelica的采摘机械手运动控制建模方法,构建了机械手的DriveLib模型库。袁文华等[78]利用基于Modelica语言的MWorks建模仿真软件,实现了高地隙喷雾机喷杆运动的建模和仿真。李明等[79]应用Modelica对电液伺服阀进行建模仿真,克服了传统方法不能从底层元件反映伺服阀动态特性的缺点,模型灵活性和可重用性有了较大提高。
(2)基于土壤-植物-机器体系建模的多软件协同仿真
从土壤-植物-机器系统角度分析,农机作业是一个复杂的机械物理过程,土壤条件、作物的表观形态、几何尺寸和物理特性等在与农机工作部件的相互作用过程中发生了一系列变化,基于传统经典力学基础的分析方法,都不能完全揭示这一复杂过程的变化特征,因此,开展针对农机工作部件与作物相互作用模型的仿真研究,对揭示农机工作部件的作用机理,实现农业机械的优化设计具有重要的现实意义。
王志明[80]建立了稻谷与脱粒、清选装置的相互作用模型,基于Matlab和CFDesign软件实现了脱粒过程的联合仿真。宗望远[81]在油菜生物力学特性和脱粒特性的研究基础上,建立了油菜本构模型,并利用ADAMS、EDEM和Matlab等多软件协同仿真技术揭示了油菜脱粒过程中的运动机理,为油菜收获机的匹配设计和性能试验奠定了基础。于建群等[82]实现了CAD软件与离散元分析软件的集成,构建了与散体物料相互作用的农业机械工作部件的通用数字化设计方法,并指出了离散元法在农机具优化设计中的潜在优势与应用前景[83]。
(3)基于硬件在环的虚拟仿真
硬件在环仿真(Hardware in loop simulation,HILS)技术在快速原型、电子控制单元和复杂控制系统的开发过程中,以其可重复性高、灵活性强、成本低等特点,广泛应用于汽车控制、自动控制系统开发与验证等领域[84],尤其是基于dSPACE的硬件在环仿真技术也逐步应用到了液压系统和农业机械的自动控制系统研究中,一定程度上缓解了农作物生长周期、田间地形差异等因素对田间试验造成的影响[85]。罗陆锋等[86]开发了基于HILS的葡萄采摘机器人虚拟试验系统,克服了季节和场地的影响,实现了对视觉定位、路径规划、夹剪行为的仿真验证。张硕[85]利用HILS模拟多种田间工况,实现了对重型拖拉机犁耕作业滑转率控制算法及控制器性能的评价测试。陈随英[87]在高地隙喷雾机的研究中,利用HILS技术搭建了全工况滑转率控制硬件在环仿真系统,验证了喷雾机滑转率控制器在各种工况下的控制效果,为后续实车研发提供了有力支撑。
2.5.2虚拟现实技术
VR技术带来了农业机械设计和开发模式的巨大变革。对于结构复杂、设计困难的大型农业机械,设计人员采用VR技术,对产品的外观、结构、性能进行建模,通过虚拟现实系统,借助逼真的虚拟作业场景,实现产品的设计、性能试验和特性评估,同时可实现人与机械的实时交互。
目前,VR技术在农业机械领域的应用前景已经引起了人们的高度重视,并取得了一些成果,但受硬件水平和建模算法的制约,一般的VR技术在农业机械设计中并不强调交互性,用户不能通过虚拟现实系统和虚拟样机之间实现实时交互。此外,VR在农业机械领域的应用并不广泛,主要集中在虚拟装配(Virtual assembly,VA)和虚拟试验(Virtual experiment,VE)两方面。
(1)虚拟装配技术
与传统装配技术相比,采用VA技术,在沉浸式或半沉浸式的环境中进行产品装配,可从整个产品的装配角度考虑其可装配性,同时进行装配规划,获得可行的装配工艺信息,指导生产。特别是复杂产品的装配问题,VA技术具有其他技术无可比拟的优势。自VA技术提出后,国内外都对虚拟装配中的人机交互、装配建模、装配序列规划、装配路径优化、碰撞检测、约束导航、装配工具以及可装配性等进行了深入研究。但是,具有沉浸感、交互性和想象性的虚拟现实装配技术在国内农业机械设计制造领域的应用尚不成熟。朱忠祥等[88]研究了基于虚拟现实的联合收获机底盘部件虚拟装配关键技术。
(2)虚拟试验验证
应用VR技术进行农业机械的虚拟试验验证不仅能够在设计阶段评估产品性能,同时也能为操作者熟悉产品使用提供便利。而VR技术在农业机械虚拟试验验证方面尚处于起步阶段[89]。KARKEE等[90]基于VR Juggler软件和Matlab/Simulink,开发了一种非道路车辆虚拟样机系统,实现了基于VR技术的驾驶功能模拟。LUECKE等[91]同样借助VR Juggler软件,搭建了收获机驾驶员培训系统,模拟John Deere Series 70 STS收获机的操作,该系统还具有对驾驶、作业控制系统的测试评估功能。JONES等[92]建立了模拟真实田间场景的作物和杂草3D虚拟模型,并用于测试作物和杂草识别的图像处理算法。
在国内,中国农业大学率先将VR技术应用于农业机械的虚拟试验,臧宇等[93]开发了拖拉机虚拟试验系统,运用MultiGen Creator和Vega Prime(VP)搭建虚拟试验场景仿真环境,实现了拖拉机加速、转向和制动试验。王菲[94]在此基础上开发了自走式农业机械虚拟试验系统,该系统内嵌车辆动力学模块,能够模拟多种动力学性能试验和田间作业试验。苑严伟[95]系统研究了典型农业机械虚拟试验方法,设计了田间工况模拟平台,实现了实体样机与虚拟农田的交互控制。杨方飞等[96]运用ADAMS分析联合收割机作业过程中的受力状态并将仿真结果导入Vega Prime中作为运动路径,以此实现对联合收割机行走作业的3D视景仿真。翟志强[89]提出了一种基于虚拟现实的拖拉机双目视觉导航试验方法。
2.6 基于PDM/PLM的协同设计
CAD/CAE/CAM/CAPP等计算机辅助技术在农业机械设计中的应用,一定程度上缩短了研发周期、提高了设计效率,但也带来了信息的爆炸性增长,开发基于PDM/PLM的农业机械产品全生命周期管理系统,实现各种CAX和DFX的集成应用、实时协同、资源共享和数据集成,对提升我国农业机械智能化设计水平具有重要意义。
在国外,PDM/PLM经过几十年的长远发展,相关研究和系统平台已日趋完善,较为著名的PDM/PLM平台如PTC Windchill、西门子TeamCenter、达索ENOVIA、Autodesk Vault等。约翰迪尔、凯斯、爱科等国际农机巨头更是将PDM/PLM技术作为支持过程重组、实施并行工程、CIMS工程和ISO质量认证等系统工程的使能技术,以保持企业竞争力。而国内的PDM/PLM产品引入及自主开发起步较晚,部分农机企业也多以基于PDM的产品管理系统为主,如中国一拖的TiPDM、山东时风集团的Windchill IntePDM、山东五征集团的WIT-PDM、中国农业机械化科学研究院的CAXA-PDM、福田雷沃的TeamCenter等。PDM/PLM在国内农业机械领域的应用整体较少,效果也不够理想。
就目前农业机械领域PDM/PLM系统的应用而言,仍有许多不足之处:农机企业在产品设计以及上下游企业协同中存在多种专业设计软件并产生了大量异构多源数据,尤其农业机械本身多样化、个性化的用户需求、频繁的配置设计与变型设计导致了协同研发中存在系统集成困难、数据一致性差、共享水平低、信息孤岛突出等问题。随着人工智能、分布式计算、Web Services等技术的推广应用,PDM/PLM的发展也越来越为人们所关注。从当前趋势来看,其研究主要集中在以下几方面:
(1)可互操作体系结构的建立
PDM/PLM系统的可互操作体系支持数字化产品信息和过程与用户系统的无缝集成,如桌面生产率应用、异构CAD系统和办公支持系统,包括ERP、SCM、CRM及其它PDM、数据库等。目前,主要有3种方法支持CAX和CAX与其他数据管理系统之间的互操作性和数据交换[97]。
①本体和语义Web技术。在智能化设计中,本体论已作为设计与其他工程活动的数据交换标准得到了广泛应用,利用本体论可在概念层次上实现异构软件间的映射。PANETTO等[47]提出了ONTO-PLM框架,作为共同的核心模型,实现了企业应用程序(如ERP、CAD和MES等)之间的数据交换。此外,模型驱动和基于知识的体系结构也支持PDM/PLM系统和其他应用程序之间的信息交互[98-99],如,MUN等[99]将日立公司的通用产品模型扩展为中性数据仓库,作为核电站ERP系统与产品数据库之间的接口。
②标准规范。通过标准的中性机制保证异构模型之间的信息定义与数据交换,例如过程标准(ISO15288,CMII)和STEP。在该方法中,XML(Extensible markup language)是Web中支持异构数据服务器之间的数据映射和通信的最常用标准语言。产品生命周期支持(Product lifecycle support,PLCS)是STEP标准AP239产品全生命周期保障应用协议,包括保障工程、构型管理、资源管理、维修及反馈四大领域,2005年由国际标准组织ISO颁布。基于此协议,文献[100]提出了一种ERP和PLM数据映射的交互框架,以支持设计和生产之间的信息交换和共享。
③基于API和Web Services的动态接口技术。在该方法中,通过API标准和Web Services实现软件集成,以支持项目团队成员之间异构信息的分发。基于中间件技术的OMG PLM Enablers和PLM Services,都是基于Web Service技术的产品数据交换标准。
PLM Services 1.0规范由平台无关模型PIM和平台指定模型PSM组成,如图8所示。其中PSM模型由基于SOAP架构的WSDL(Web services description language)规范和XML标准共同开发。文献[101]提出了基于PLM Services规范的异构PDM系统集成架构,通过在PDM系统和PLM Services服务器之间实现数据模式的适配,把PDM系统的数据转换成PLM Services标准格式,应用于另一个PDM系统。此外,GUNPINAR等[102]以PLM Services框架为基础,利用Web方式集成异构PDM,实现了SmartPDM和DynaPDM间的产品数据同步交换。

图8 OMG PLM Services1.0规范架构Fig.8 OMG PLM Services1.0 architecture
(2)以Web Services为支撑的工作流管理
Web Services是一种基于Internet的支持分布式计算和企业间协作的新标准,广泛应用于工作流管理。2002年,工作流管理联盟颁布了基于Web Services的流程定义语言1.0版最终文本(文档编号:WFMC-TC-1025),与此前发布的工作流应用软件接口规范构成了工作流定义及系统设计标准。文献[103]开发了一种基于服务契约的方法,以支持供应商和客户之间跨工作流交互操作,并开发了以交换业务流程作为商业服务的体系架构。为了促进跨组织工作流的管理和互操作性,JIANG等[104]开发了基于Petri网络的流程视图方法。企业可根据不同市场需求,重用内部工作流模型,快速、灵活地构建企业间协同工作流模型。然而,其局限性在于参与企业的工作流建模方法必须一致,因此,JIANG等[105]在此基础上提出基于Web Services和ProcessView相结合的方法,以实现更好的企业间协作和工作流管理。在该方法中,参与企业的单个工作流模型首先映射到ProcessView工作流模型,以WSDL统一表示所有ProcessView模型,最后,通过Web服务的业务流程执行语言(BPEL4WS)构建整个CPD流程。在此基础上,利用JXTA平台开发了基于混合P2P的WMSs框架,协调控制各部门之间的流程和信息流,实现业务流程自动化。此外,ALEXOPOULOS等[106]提出了面向Web Services的工作流管理系统,并在该系统中提出了连接异构工程工具的3种互补技术和标准:业务流程执行语言BPEL、自动化标记语言以及与BPEL引擎关联的Web服务。
(3)基于PDM/PLM的访问控制技术
PDM/PLM系统的管理范围涉及设计、制造、销售、财务和售后等多个部门,信息安全问题日益突出,各种信息安全技术得到了大规模应用,尤其是系统的访问控制技术成为当下PDM/PLM系统安全研究的热点,表4描述了部分主流PDM/PLM系统的授权模型分析。
传统的访问控制模型很多,如矩阵模型、自主访问控制模型(Discretionary access control,DAC)、强制访问控制模型(Mandatory access control,MAC)、基于角色的访问控制模型(Role-based access control,RBAC)以及其扩展模型——基于角色访问控制管理模型(Administrative role-based access control,ARBAC)等[107]。RBAC模型具备容易理解、支持最小权限原则、责任分离、权限继承等优点,一度成为该领域的主流技术。
随着PDM/PLM系统的企业协作复杂性、用户访问动态性、工作流程多样性等问题日益凸显,RBAC模型缺乏对上下文环境的动态考虑,增加了系统的不安全性。因此,为了弥补传统模型的不足,更方便控制和管理访问控制模块的权限粒度,国内外学者对访问控制模型进行了积极探索,并提出了一些RBAC的改进模型和具有典型代表性的访问控制模型。OH等[108]提出了一种基于任务和角色的访问控制模型(Task-role-based access control,T-RBAC),作为RBAC的改进模型,T-RBAC先将访问权限分配给任务,再将任务分配给角色,角色通过任务与权限关联,任务是角色和权限交换信息的桥梁。AL-KAHTANI等[109]提出了一种基于属性的访问控制模型(Attributes-based access control,ABAC),该模型是一种为解决行业分布式应用可信关系访问控制模型,它利用相关实体(如主体、客体、环境)的属性作为授权的基础来研究如何进行访问控制。与ABAC一样,使用控制模型(Usage control,UCON)对用户权限进行更细粒度的控制。UCON模型不仅包含了传统模型,而且还包含了数字版权管理(DRM)、信任管理等。UCON模型涵盖了现代商务和信息系统需求中的安全和隐私这两个重要问题,被称作下一代访问控制模型。此外,基于风险的访问控制模型(Risk-based access control,RBAC)、基于能力的访问模型(Capability-based access control,CapBAC)、基于组织的访问控制模型(Organizational-based access control,OrBAC)、基于角色的隐私感知访问控制模型(Privacy-aware role-based access control,P-RBC)等也得到了广泛关注。
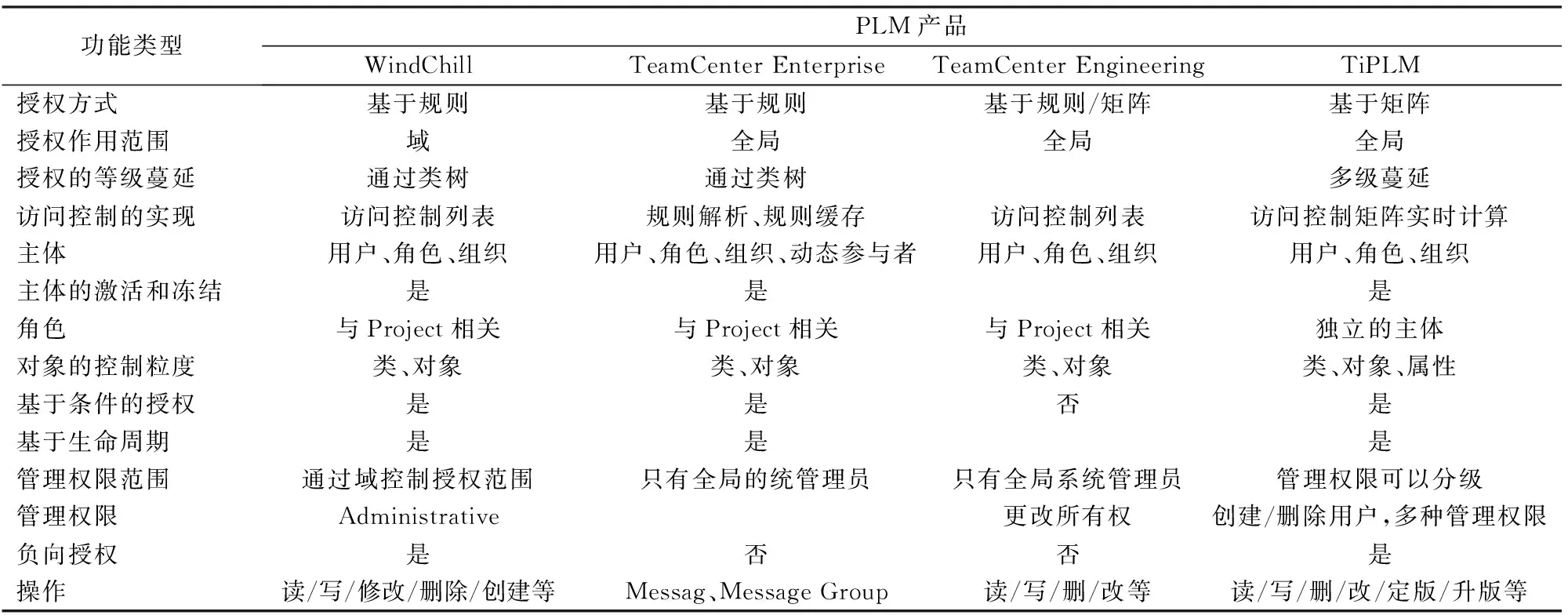
表4 部分PDM/PLM系统的授权模型分析Tab.4 Authorization model analysis of different PDM/PLM systems
3 发展趋势及展望
近年来,随着互联网、网络物理系统(Cyber-physical systems,CPSs)等技术的发展和应用,人类已经进入工业4.0时代。农业机械的智能化设计技术从早期的数字化设计逐渐向设计的协同化、网络化和智能化方向发展。笔者认为我国农业机械智能化设计应紧紧围绕农机制造企业的实际需求,以提高农业机械设计能力和核心竞争力,促进农机企业的可持续发展为目标,开展基础理论、关键技术研究,解决当前产品正向设计、三维建模、知识重用、多学科动态联合仿真、分布式协同设计等重大科学问题,形成一套基于知识的农业机械智能化设计理论和体系。未来农业机械的智能化设计技术研究将主要从以下几方面展开:
(1)农业机械设计基础数据及互作机理
立足于发展现代农业、保障粮食安全的国家战略需求,针对农业机械设计基础数据匮乏、产品质量和可靠性较差等问题,开展土壤-机器-作物系统的互作规律、农机载荷谱、基础工艺/材料/部件、关键作业装置等技术瓶颈的研究,研究构建基于网络的农田土壤力学参数、农作物机械物理特性参数、农业机械载荷谱和结构力学参数、工程材料以及整机和通用零部件数字化设计模型数据库,为农业机械智能化设计提供数据支撑。
(2)以用户需求为导向的农业机械个性化、定制化设计
针对农业机械用户需求的多层次性、模糊性和隐蔽性等特点,开展基于大数据技术的用户需求分析,深入挖掘农机具使用、田间管理与用户需求之间的潜在关系,建立规范化的用户需求模型,同时,研究用户需求和产品设计之间的转化和映射方法,如人工智能算法、TRIZ理论和AD理论等,完成用户域到功能域、结构域的关系映射,从而设计出高效、低成本的农机产品,以满足多样化、个性化的用户需求。
(3)以知识重用为驱动的产品建模技术
在产品全生命周期的视角下,实现多开发人员、多系统、多阶段间的数据交换、信息共享和跨多学科知识重用需要集成的产品建模框架,当前主流建模技术如本体建模、STEP标准建模、MBD技术和基于Modelica的建模等,广泛用于汽车、航空航天、船舶等领域,显著提高了智能化设计与加工制造的协同性,尤其是MBD技术,彻底改变了产品的研发模式,保证了设计数据的唯一性,减少了对其他信息系统的过度依赖,实现了设计/制造厂/供应商之间的高效信息沟通,因此,从农业机械的全生命周期角度,开发集成产品TDP、具有统一建模思想的农业机械产品表示模型,实现知识重用和全生命周期过程的无缝集成与信息共享是未来农业机械智能化设计研究的重点。
(4)基于土壤-植物-机器系统的多领域协同仿真技术
随着精细农业、信息农业的发展,田间管理和农艺要求对农机性能提出了更高要求,农业机械的仿真分析也由单一领域向多领域协同仿真发展。柔性体建模、多学科优化、人机交互、硬件在环仿真、机电液联合仿真等关键技术成为本领域的研究重点。此外,考虑到农业机械作业的特殊性,从土壤-植物-机器系统角度,深入分析多物理场下作物与工作部件的相互作用机理,实现农业机械的优化设计已引起了人们的广泛关注,而基于虚拟现实技术的农机产品虚拟装配、虚拟仿真和虚拟试验验证等典型应用则成为未来研究的热点。
(5)以分布式计算、CPS系统为支撑的PDM/PLM协同管理平台
未来PLM的发展将更加专注于覆盖产品生命周期各阶段及更好地支持工程协同,因此,与产品全生命周期相关的技术和应用,将成为PLM的研究重点,主要包括企业基础信息框架、统一产品模型、单一数据源、基于Web的产品入口,以及PLM标准与规范体系。此外,分布式计算技术,特别是云计算,将支撑下一代PLM的发展。基于云的PLM将为企业节省部署成本,合理配置资源,同时,更有效地实现跨组织、跨地域的实时协同工作,确保数据的准确性、唯一性。而CPS的应用,推动了制造企业的数字化转型。借助智能传感器、智能化工业设备对数据进行高度可视化及深入分析,优化产品生产制造,形成新工业数据生命周期,因此,利用PLM提供的协调管理平台,打通流程、人、数据等多个环节,实现对智能工厂的运营支撑,是PLM未来发展的主要方向。
猜你喜欢
军事文摘(2022年19期)2022-10-18
建材发展导向(2022年2期)2022-03-08
成都信息工程大学学报(2021年5期)2021-12-30
河北农机(2021年8期)2021-08-24
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年10期)2021-07-16
今日农业(2020年16期)2020-12-14
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
农民致富之友(2019年17期)2019-07-01
