基于极点配置与最优控制的磁悬浮系统控制器
2019-10-08 08:34王翼张凤登吉妍范鑫怡张文婷
软件 2019年7期
关键词:最优控制
王翼 张凤登 吉妍 范鑫怡 张文婷


摘 要: 详细介绍了“磁悬浮球实验系统”的结构和工作原理,建立了磁悬浮球实验系统的物理模型,在物理模型的基础上推导出系统状态空间表达式,建立了系统数学模型,以此为依据分析了系统的稳定性、可控性和可观性,并在Matlab/Simulink环境下建立了系统仿真模型以研究控制系统动态特性。为了实现对磁悬浮球实验系统的快速稳定控制,提出了极点配置算法与最优控制算法两种控制方法来设计状态反馈控制器,并通过实验仿真分析了控制器和观测器的设计合理性。实验表明,极点配置法可通过改变期望极点来快速改变磁悬浮系统的响应性能,而最优控制法可通过改变Q、R矩阵来改变磁悬浮系统响应性能,两者均可有效控制磁悬浮实验系统。
关键词: 磁悬浮球实验系统;极点配置;最优控制;Simulink仿真;状态反馈控制
中图分类号: TP391.9 文献标识码: A DOI:10.3969/j.issn.1003-6970.2019.07.001
本文著录格式:王翼,张凤登,吉妍,等. 基于极点配置与最优控制的磁悬浮系统控制器[J]. 软件,2019,40(7):01-07+88
【Abstract】: The structure and working principle of the "magnetic suspension ball experimental system" are introduced in detail. The physical model of the magnetic suspension ball experimental system is established. The system state space expression is derived based on the physical model, and the system mathematical model is established. The stability, controllability and observability of the system are established. The system simulation model is established in the Matlab/Simulink environment to study the dynamic characteristics of the control system. In order to realize the fast and stable control of the magnetic suspension ball experimental system, two control methods, the pole placement algorithm and the optimal control algorithm, are proposed to design the state feedback controller. The design rationality of the controller and the observer is analyzed through experimental simulation. Experiments show that the pole placement method can quickly change the response performance of the magnetic levitation system by changing the desired pole. The optimal control method can change the response performance of the magnetic levitation system by changing the Q and R matrices, and both can effectively control the magnetic levitation experimental system.
【Key words】: Magnetic suspension ball experimental system; Pole placement; Optimal control; Simulink simulation; State feedback control
0 引言
磁懸浮技术是集电磁学、控制工程、信号处理、机械学、动力学等多门学科于一体的新型高科技技术[1]。磁悬浮技术因其无接触、无摩擦等特点而具有能耗低、污染小、噪声小等优点,因此在各领域被广泛应用[2]。但由于磁悬浮系统本质上是不稳定的,所以为使系统稳定,必须加入反馈控制环节使其构成闭环系统。而“磁悬浮球实验系统”作为一种磁悬浮技术研究装置,因其实时控制要求度高的特点,是许多控制算法实施、检验的对象[3]。本文以“磁悬浮球实验系统”为研究对象,采用极点配置法和最优控制法两种控制方法来设计状态反馈控制器,并通过Matlab/Simulink仿真结合根轨迹法研究系统处于不同控制状态下的特性[4]。
1 磁悬浮球实验系统的工作原理
磁悬浮实验系统主要由LED光源、电磁铁、光电位置传感器、电源、放大及补偿装置、数据采集卡和控制对象(钢球)等元件组成,如图1所示。
电磁铁绕阻中通以一定的电流会产生电磁力F,控制电磁铁绕阻中的电流i,使之产生的电磁力与钢球的重力mg相平衡,钢球就可以悬浮在空中而处于平衡状态。为了得到一个稳定的平衡系统,必须实现闭环控制,使整个系统稳定且具有一定的抗干扰能力。本系统中采用光源和光电位置传感器组成的无接触测量装置检测钢球与电磁铁之间的距离x的变化,为了提高控制的效果,还可以检测距离变化的速率。电磁铁中控制电流的大小作为磁悬浮球控制对象的输入量。磁悬浮实验系统中各参数(各参数均采用国际单位制单位)物理意义如表1所示。
2 磁悬浮球实验系统建模
2.1 系统方程的描述
为了用状态空间法分析或设计一个自动控制系统,首先需要建立其数学模型,即描述系统运动规律的状态空间表达式。本系统的数学模型是以小球的动力学方程和电学、力学关联方程为基础建立起来的。
利用MATLAB创建线性二次型最优控制Simulink型,结构与极点配置模型相同,更改矩阵K,得到系统单位阶跃响应曲线如图5。
由图5和表4可以看出最优控制法在保证Q阵不变情况下,可以通过改变输入变量矩阵R,来改变系统性能指标。本实验系统中对输入变量u(t)无约束,故可任意改变输入信号加权阵R。且由图表可得,当R越小,系统上升时间越长、调节时间越长、终值越小即放大倍数越小、无超调量即无振荡[15],故可以根据实际系统需求,依此结论在保证状态变量Q阵不变的情况下,可通过调节输入变量矩阵R来达到规定系统性能指标。综合考量,取上升时间最小K5曲线即输入变量矩阵R = 1代表的控制系统性能较优。
4.3 极点配置与线性二次型最优控制比较
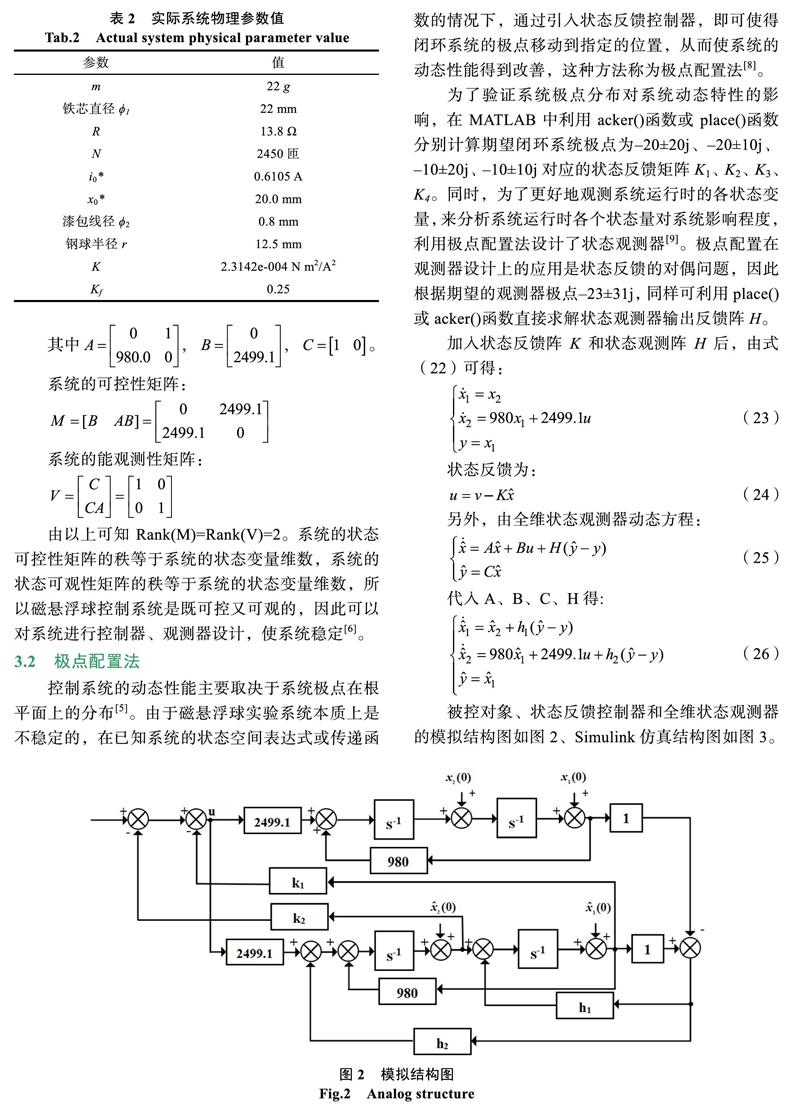
由上述图表可以看出,应用极点配置法设计磁悬浮控制系统时由于虚部不为零,故会产生振荡,即超调量不为零,为了增加控制系统的快速响应,满足最优衰减比4∶1,期望极点的负实部应适当取小、虚部绝对值应适当取大。而应用最优控制法设计控制系统则可实现超调量始终为零,不会产生振荡,这与我们设计线性二次型最优控制器,降低控制作用成本,即系统响应越快,振荡越少越好的目的是相符合的。取两种控制方法响应较优的K3、K5所代表响应曲线图比较如图6。
由图6可以看出,对于磁悬浮球实验系统,采用极点配置法和线性二次型最优控制法设计反馈控制器均可改变系统动态性能,实现系统稳定[16]。但相比較而言,采用极点配置法系统衰减比接近4∶1,响应上升时间较最优控制更短,即响应越快,控制作用明显;而采用最优控制法的系统响应上升时间更长,且超调量为零,无振荡过程,即控制所损耗能量较低。
综上,本质上两种控制方法都是依靠改变状态反馈矩阵K来改变系统性能,只不过极点配置法是从系统传递函数角度出发通过改变极点来改变系统性能,而线性二次型最优控制则是从能量观点出发通过改变变量矩阵改变系统性能。依据两种控制方法设计控制系统所具有的不同动态性能的特点,对实时响应有快速响应要求的控制系统建议采用极点配置法设计状态反馈控制器[17];而对于输入量无约束,响应无快速响应要求的系统,或者性能指标包含能量函数、被控量只能较缓慢变化的物理量,例如:温度,则建议采用线性二次型最优控制法设计状态反馈控制器。
5 结论
本文借助磁悬浮球实验系统研究了采用极点配置法和线性二次型最优控制控制法设计控制系统对系统动态特性影响。建立了磁悬浮球实验系统的物理模型、数学模型,并采用软件MATLAB/Simulink进行实验仿真得到不同反馈矩阵下系统单位阶跃响应曲线。实验表明,两种控制方法均能有效改变系统动态性能,实现系统稳定控制。但相较而言,极点配置可快速提高系统动态响应速度,因此可根据实际要求设置期望极点,加快系统响应,常应用于对实时响应要求高的控制系统;而线性二次型最优控制则响应较为缓慢,但能减少系统振荡过程,从而降低系统控制能量损耗。除此之外,由于线性二次型最优控制的最优性是相对的,所以可根据系统控制本身成本来选取适当输入变量矩阵R来降低系统控制成本的同时,取得理想的控制效果。
参考文献
王义进. 基于DSP磁悬浮球控制系统的设计与研究[D]. 福建厦门: 厦门大学, 2007: 1-2.
赵宁. 磁悬浮控制系统分析与设计[D]. 东北大学, 2010: 2-3.
王晓乐. 磁悬浮球系统控制算法的研究[D]. 四川成都: 西南交通大学, 2016: 2-3.
周群, 郭露芳, 林立华. 虚拟仿真实验在开放式实验教学中的应用[J].软件, 2016, 37(05): 31-33.
胡寿松.自动控制原理[M]. 北京: 国防工业出版社, 1998
刘豹. 现代控制理论[M]. 北京: 机械工业出版社, 2006
杨冶杰. 线性系统极点配置控制器设计与仿真[J]. 现代化工, 2004, 24(z2): 191-193.
朱志明, 符平坡, 夏铸亮, 程世佳.基于极点配置的逆变焊接电源最小拍控制及其稳定鲁棒性[J]. 清华大学学报(自然科学版), 2019, 59(02): 85-90.
胡品慧. 状态观测器的极点配置——变量结构系统法[J]. 山东济南: 济南大学学报(自然科学版), 1990(1): 6-8.
高新, 袁健华.椭圆方程最优控制问题的数值算法研究[J].软件, 2018, 39(07): 57-62.
周晓宏, 刘红军.基于MATLAB的线性二次型最优控制器设计[J]. 长安大学学报(自然科学版), 2002(03): 88-90.
舒光伟, Meisinger R. 基于Simulink的磁悬浮控制系统仿真[J]. 系统仿真学报, 2008, 20(8): 2168-2170.
王彩霞.LQR最优控制系统中加权阵的研究[J]. 西北民族大学学报(自然科学版), 2003(02): 29-31.
谢丽蓉, 李伟.线性二次型最优控制在倒立摆系统中的应用[J]. 重庆工学院学报(自然科学版), 2008(08): 124-128.
翟娟, 谭公礼, 李文婷.消防水泵恒压模糊控制器的设计及仿真[J]. 软件, 2017, 38(09): 63-67.
刘明.计算机技术应用下的电气自动化控制系统设计分析[J]. 软件, 2018, 39(06): 170-173.
范云飞, 任小洪, 袁文林.基于并联PID的四旋翼飞行控制策略设计[J]. 软件, 2015, 36(04): 37-39.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2021年6期)2021-07-20
数学年刊A辑(中文版)(2021年1期)2021-06-09
应用数学(2020年2期)2020-06-24
数学物理学报(2019年3期)2019-07-23
数学年刊A辑(中文版)(2018年4期)2019-01-08
测控技术(2018年12期)2018-11-25
数学物理学报(2018年3期)2018-07-17
西南交通大学学报(2016年6期)2016-05-04
通信电源技术(2016年4期)2016-04-04