基于动态流量数据的可变导向车道控制系统研究
2019-10-08 05:07黄克彪
无线互联科技 2019年14期
黄克彪
摘 要:文章论述了基于动态流量数据的道路交叉口可变导向车道控制系统的方案设计,该系统通过视频流量检测器实时采集交叉口的车流量信息,根据不同放行方向车道的实时流量数据,采用相关的算法计算交通指数,依据交通指数调整可变导向车道的车流放行方向,匹配路口的实际车辆通行需求,从而加快路口车辆的通行速度,提高路口的车辆通行效率,减轻拥堵。适用于不同时段车流流向变化比较大的交叉口。
关键词:交叉口;可变导向车道;控制系统
由于现在城市车辆保有量逐渐增多,城市道路的车辆通行压力越来越大,很多道路交叉口全天直行和左转的“潮汐现象”愈发明显,路口固定车道导向出现了和实际车流流向不匹配的矛盾,可变导向车道[1]的出现,有助于解决此矛盾,对于缓解道路压力、减轻车辆拥堵非常实用。可变导向车道是根据不同车流流向和交通控制需求设置可变换导向方向的交叉口进口车道。它是解决道路交通拥堵的重要手段之一,而要让它的作用发挥好,提高路口的通行效率,就要解决好两个问题:(1)对路口实际车辆通行状态的实时和准确感知。(2)确保可变导向车道放行方向调整的适应性和有效性。
1 可变导向车道控制系统
1.1 系统简述
可变导向车道控制系统[2]具有自动控制功能,自动控制的可变导向车道是目前最为灵活的控制模式,它是通过视频流量检测器对进口车道流量和流向的实时变化情况进行统计分析,判别不同方向的放行需求,从而自动变换可变导向车道的导向方向,有效提高可变导向车道的控制效率。可变导向车道控制系统实现控制的实施步骤:(1)通过视频流量检测器检测路口车道流量数据。(2)计算交叉口进口车道不同放行方向的交通指数。(3)自动控制算法根据不同放行方向的交通指数判断是否需要切换可变导向车道的放行方向。(4)通过信号机切换可变导向车道的车流放行方向。
1.2 系统结构
可变导向车道控制系统由前端设备和后端平台两部分组成。前端设备包括信号机、视频流量检测器、可变导向车道指示标志,后端平台是可变导向车道控制系统的控制中枢。其中,视频流量检测器对各方向交通流进行检测,包括每个车道的实时流量、车道平均时间占有率等信息,并将根据实际需要的时间间隔统计后的数据实时上传至后端平台,平台通过相应的算法对数据进行处理后判断是否需要切换可变车道放行方向,如需改变,则平台在人工确认后或者自动下发指令给信号机,由信号机实现可变导向标志的放行方向切换。
2 控制系统的关键技术
2.1 路口数据采集
本系统采用视频流量检测器采集路口的实时交通流量数据,为了保证数据的有效性,视频流量检测器的布设应遵循以下原则:(1)检测器的监视区域应在靠近停车线的实线分道线路段及其上游。(2)根据交叉口实际情况,视频流量检测器的安装可以采取借用现有杆件或在适当位置新立杆件的方式。(3)检测器正对所需检测交通流的车头进行安装,即摄像机朝向车辆驶来方向,正向拍摄车辆正面。(4)单个视频流量检测器最多可覆盖4条同向车道。
2.2 可变控制算法
可变控制算法根据路口不同放行方向车道车流量和时间占有率,计算当前各个放行方向的交通指数,依据交通指数来判定交叉口可变导向车道的车流放行方向。算法实现步骤如下:
步骤1:获取计算周期T秒内,左转放行时长TL(单位:s)、直行放行时长TS(单位:s)、车道级别车流量数据Q(i)(单位:辆)和平均时间占有率O(i)。
步骤2:分别计算直行方向和左转方向每秒钟车流量和平均时间占有率。
式中,FLowL为左转方向平均每秒的通过车辆数,n为左转方向的车道数,QL(i)为第i个左转车道的流量,TL为该方向的放行时间。
式中,0ccpyL为左转方向的平均时间占有率,n为对应放行方向的车道数,QL(i)为第i个左转车道的平均时间占有率。
参照以上公式计算直行方向平均每秒的通过车辆数FLowS和平均时间占有率0ccpyS。
式中,a1=0.7,a2=0.3,a3=4,a4=0.02是权重参数,在实际使用中可根据路口实际情况进行调整。式中,FLowS为直行车道每秒流量、FLowL为左转车道每秒流量、0ccpyS为直行车道平均时间占有率、0ccpyL为左转车道平均时间占有率、IndexS为直行车道的交通指数、IndexL为左转车道的交通指数。T为统计周期时间。
步骤4:对交通指数做平滑处理,避免突变情况的发生,保证放行方向的切换过渡平滑进行。
式中,Index(i-1),Index(i-2)分别为前两个时刻的交通指数值。δ为调整参数,δ取值默认为0.5。Indexmin为下限值,Indexmax为上限值。
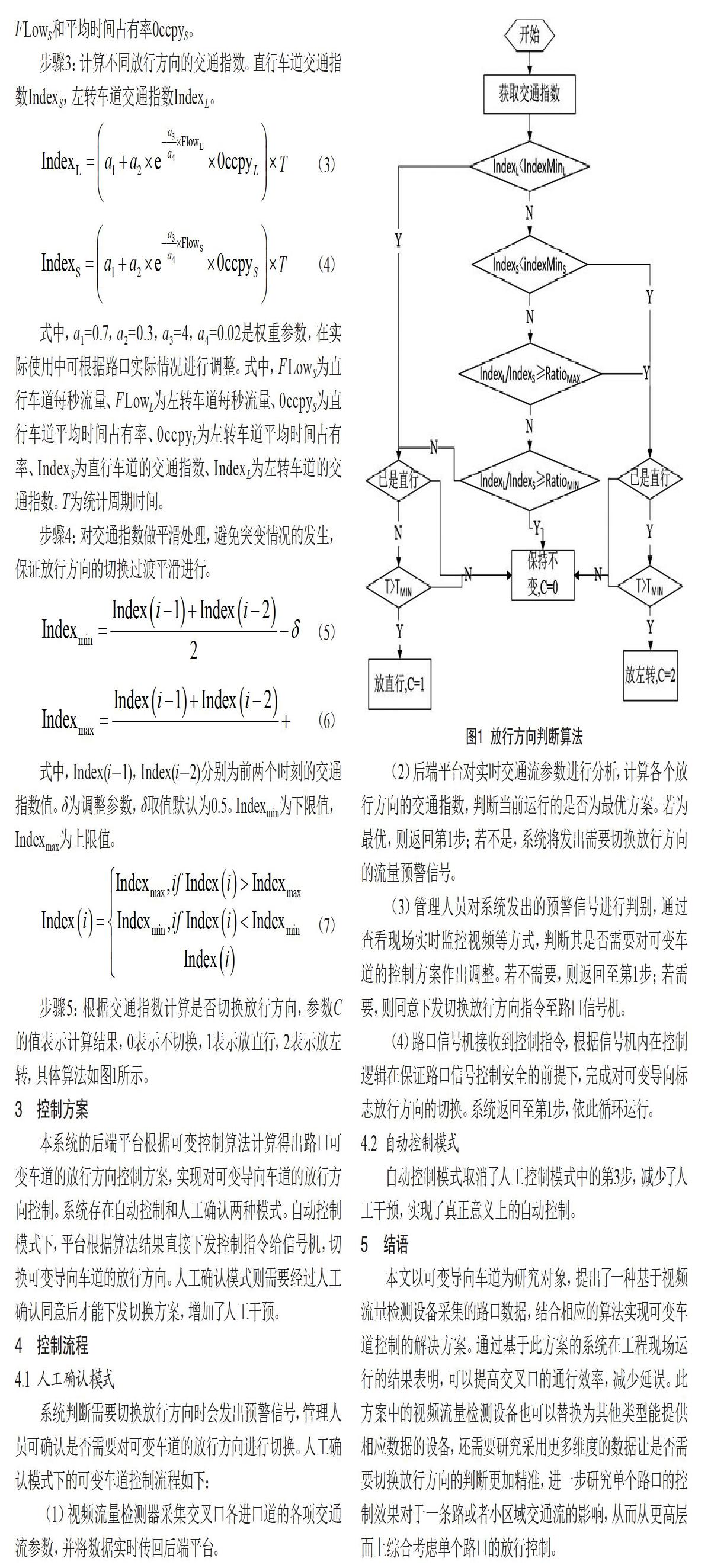
步骤5:根据交通指数计算是否切换放行方向,参数C的值表示计算结果,0表示不切换,1表示放直行,2表示放左转,具体算法如图1所示。
3 控制方案
本系统的后端平台根据可變控制算法计算得出路口可变车道的放行方向控制方案,实现对可变导向车道的放行方向控制。系统存在自动控制和人工确认两种模式。自动控制模式下,平台根据算法结果直接下发控制指令给信号机,切换可变导向车道的放行方向。人工确认模式则需要经过人工确认同意后才能下发切换方案,增加了人工干预。
4 控制流程
4.1 人工确认模式
系统判断需要切换放行方向时会发出预警信号,管理人员可确认是否需要对可变车道的放行方向进行切换。人工确认模式下的可变车道控制流程如下:
(1)视频流量检测器采集交叉口各进口道的各项交通流参数,并将数据实时传回后端平台。
(2)后端平台对实时交通流参数进行分析,计算各个放行方向的交通指数,判断当前运行的是否为最优方案。若为最优,则返回第1步;若不是,系统将发出需要切换放行方向的流量预警信号。
(3)管理人员对系统发出的预警信号进行判别,通过查看现场实时监控视频等方式,判断其是否需要对可变车道的控制方案作出调整。若不需要,则返回至第1步;若需要,则同意下发切换放行方向指令至路口信号机。
(4)路口信号机接收到控制指令,根据信号机内在控制逻辑在保证路口信号控制安全的前提下,完成对可变导向标志放行方向的切换。系统返回至第1步,依此循环运行。
4.2 自动控制模式
自动控制模式取消了人工控制模式中的第3步,减少了人工干预,实现了真正意义上的自动控制。
5 结语
本文以可变导向车道为研究对象,提出了一种基于视频流量检测设备采集的路口数据,结合相应的算法实现可变车道控制的解决方案。通过基于此方案的系统在工程现场运行的结果表明,可以提高交叉口的通行效率,减少延误。此方案中的视频流量检测设备也可以替换为其他类型能提供相应数据的设备,还需要研究采用更多维度的数据让是否需要切换放行方向的判断更加精准,进一步研究单个路口的控制效果对于一条路或者小区域交通流的影响,从而从更高层面上综合考虑单个路口的放行控制。
[参考文献]
[1]NXP Semicondoctors.LPC178X/7X User Manual[Z].2014.
[2]NXP Semicondoctors.Guidelines for full-speed USB on NXPs LPC microcontrollers[Z].2014.
[3]边海龙,贾少华.USB2.0设备的设计与开发[M].北京:北京人民邮电出版社,2004.
[4]张念淮,江浩.USB总线接口开发指南[M].北京:国防工业出版社,2001.
猜你喜欢
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
考试周刊(2016年88期)2016-11-24
工程建设与设计(2016年8期)2016-03-11
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
河南科技(2014年14期)2014-02-27