
基于Unity 3D的地铁信号设备综合仿真平台研究
2019-09-28 02:26:52孔德龙胡万欣
实验技术与管理 2019年9期
孔德龙,胡万欣
基于Unity 3D的地铁信号设备综合仿真平台研究
孔德龙,胡万欣
(中南民族大学 计算机科学学院,湖北 武汉 430074)
根据地铁信号基础设备的结构和原理,建立了基于虚拟现实技术的实验教学综合仿真平台。利用Unity 3D实现地铁信号基础设备机械结构、动作原理以及装配顺序的三维建模,并模拟地铁列车运行驾驶模式。利用该仿真平台,能够使学生快速理解和认知信号基础设备的技术参数、机械结构、动作原理、装配顺序和地铁列车的运行模式,提高轨道交通专业课程教学和实验教学的效率并降低实验成本。
地铁信号设备;驾驶模式;虚拟现实;Unity 3D;实验教学
信号基础设备是保证地铁安全运行的关键技术装备[1-3]。由于地铁列控系统通过信号设备来保证列车安全运行,实现列车的转线、速度控制等,因此要求轨道交通类专业的学生掌握信号设备的基本原理、结构等专业知识,学校对实验教学的要求也越来越高。但是,目前由于地铁现场不对外开放,且地铁信号设备一般体积都比较大、价格昂贵,因此对实物实验设备的采购成本偏高,实验室无法真实再现地铁场景,导致学生动手实践能力受到限制。更重要的是,在轨道交通设备实验过程中很容易发生零件丢失、损坏、装配不良,甚至会出现砸伤、碰伤等安全事故,给实验教学带来诸多不利。
利用虚拟现实技术可以创建和体验虚拟世界的计算机仿真系统。该系统利用计算机生成模拟环境,是多源信息融合、交互式的三维动态视景和实体行为的系统仿真,使用户沉浸在虚拟环境中[4-5]。目前虚拟现实技术在医疗、航空、军事等领域得到了广泛的应用。若将其应用于轨道交通类专业实验教学中,则具有重要的现实意义,具有投入少、见效快的优点。
Unity 3D是由Unity Technologies开发的一个可以轻松创建三维视频游戏、建筑可视化、实时三维动画等类型互动内容的多平台、综合型游戏开发工具,是一个全面整合的专业游戏引擎[6-7]。本文提出在轨道交通类专业基础课程的教学和实验中,利用Unity 3D引擎创建地铁信号设备综合仿真平台,实现对地铁运行场景、信号机、转辙机、轨道电路等基础设备的三维仿真建模,分析和模拟实现地铁列车运行模式,使学生能够建立起理论和实践的联系,更好地理解和掌握本专业基础设备的原理和功能,提高轨道交通信号专业基础课程的教学质量。
1 地铁信号基础设备
1.1 信号机的组成及作用
地铁列车在线路上运行时,需要及时了解前方信息,需要根据铁路信号控制行驶速度,而信号机是一种最常用的列车控制视觉信号[8]。信号机通过显示不同的颜色信息,将列控信息传递给列车驾驶员。
地铁正线信号系统中主要采用三显示LED信号机,它主要由LED发光组件和信号机附属组件组成,其中LED发光组件是信号机的核心部分,实现信号机不同颜色的显示。三显示LED信号机有4种显示含义:
(1)红灯:禁止通行,必须在信号机前停车;
(2)绿灯:允许通行,进路中所有道岔开通直向,表示按规定速度运行;
(3)黄灯:允许通行,进路中至少有一组道岔开通侧向,表示注意或降低速度;
(4)红灯+黄灯:引导信号,允许司机驾驶列车在规定速度下(不超过25 km/h)越过信号机,并随时准备停车。
1.2 道岔、转辙机的组成及结构
(1)道岔的组成及结构。由于转辙机的作用是驱动道岔完成道岔位置的转换,因此首先对道岔的结构进行分析和研究。道岔是列车从一条股道转向另一股道的转辙设备[5]。道岔主要由基本轨、尖轨、直合拢轨、弯合拢轨、翼轨、辙岔心和护轮轨组成,其中基本轨和尖轨是道岔最重要的组成设备[8]。图1为道岔基本结构示意图。与正线线路连接的两根钢轨称作道岔的基本轨,而尖轨是道岔的可动部分。道岔的尖轨有两根,一根离开基本轨而另一根则密贴于基本轨。道岔位置的变换是通过转辙机拖动尖轨实现的。
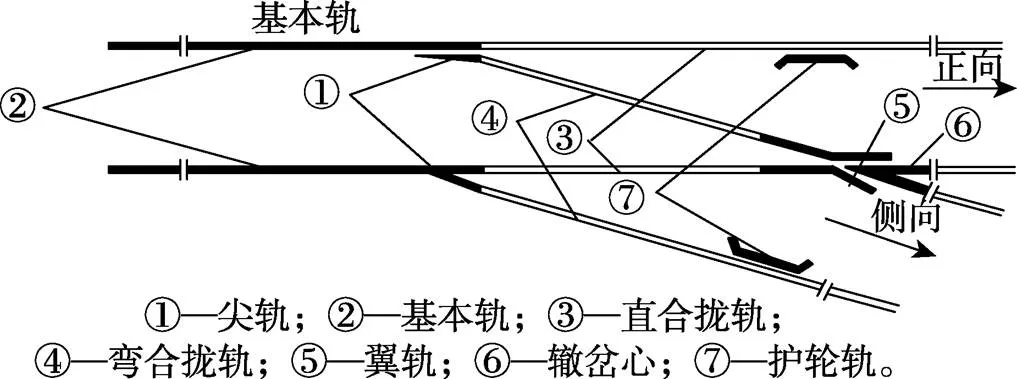
图1 道岔基本结构示意图
(2)ZD6型转辙机基本结构分析。ZD6型转辙机是一种直流电动转辙机,是我国铁路系统中最常用的一种道岔转换设备,广泛应用在国铁、地铁系统中[9]。ZD6型转辙机主要由电动机、减速器、摩擦联结器、主轴、动作杆、表示杆、自动开闭器、外壳等组成[9]。图2为ZD6型转辙机的结构示意图。
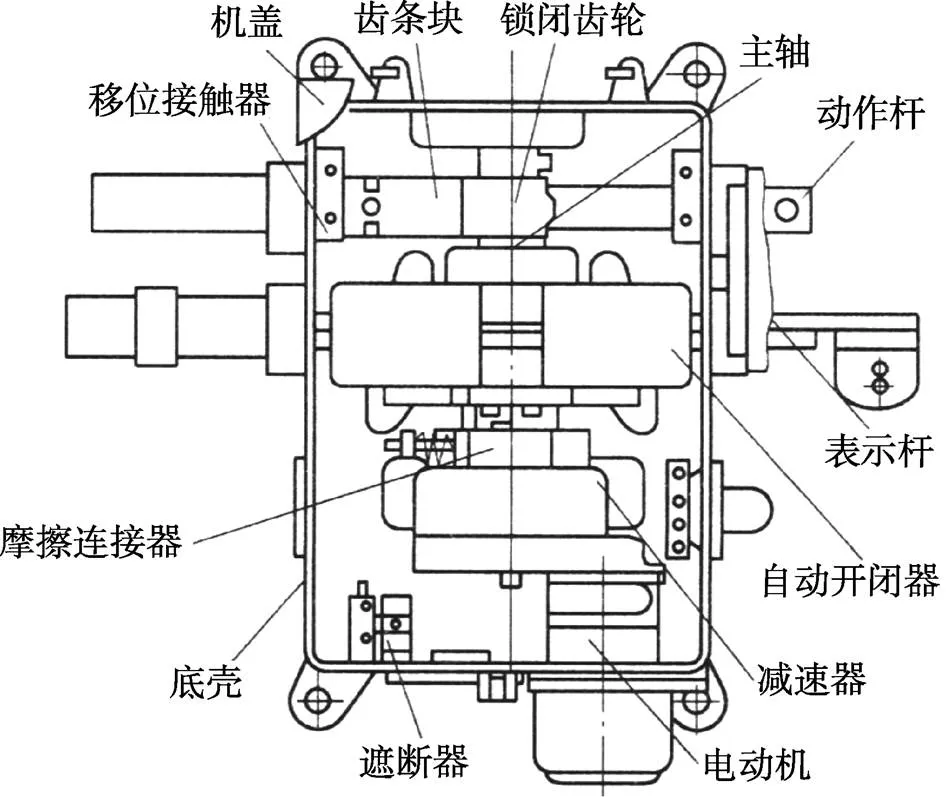
图2 ZD6型转辙机结构示意图
1.3 轨道电路的组成及原理
轨道电路是轨道交通信号系统的重要设备之一。轨道电路以2根钢轨为导体,构成一个闭合回路;当列车车轮轧入回路时,由于轮对材质为导体,因此使闭合回路短路,从而完成对列车位置的检测。
轨道电路主要由轨道电源E、限流电阻R、轨道继电器GJ、钢轨绝缘、跳线和2根钢轨组成[10-11](见图3)。

图3 轨道电路原理图
轨道电路在地铁信号系统中不仅能够检测列车位置,而且还可以实现钢轨的完整性检查。当钢轨出现断裂时,闭合回路发生断路,使轨道继电器落下,从而保证列车的安全行驶。
2 地铁列车运行模式分析
地铁列车在正线运行主要有5种运行模式[12]:
(1)自动驾驶模式:通过车载及轨旁设备实现列车的自动驾驶,无须驾驶员操作;
(2)连续式速度防护下的人工驾驶模式:由连续式的速度防护系统监督,并由驾驶员手动驾驶,当列车速度超过该段轨道线路容许行驶的最高速度时,列车将由车载设备自动完成制动,速度降为0之后才能再次人工启动;
(3)点式速度防护下的人工驾驶模式:与连续式速度防护下的人工驾驶模式相似,不同点在于速度防护系统的车-地通信方式为点式;
(4)限制人工驾驶模式:驾驶员手动驾驶,但列车速度不得超过25 km/h;
(5)非限制人工驾驶模式:由驾驶员手动驾驶,列车速度不受限制。
3 虚拟实验平台的开发
本实验平台的开发是为了满足学生理解信号设备的结构、原理,了解地铁列车运行模式的实现方法。根据信号仿真平台的教学要求,该平台开发主要包括4部分:实物数据测量、虚拟模型及地铁场景搭建、相关动画添加和列车运行模式模拟。
3.1 实物数据测量
为保证平台实验数据的真实性与准确性,地铁场景及各信号设备数据均通过实际测量获得。对可以直接测量的元件,利用游标卡尺等工具进行精确测量,如道岔、动作杆和表示杆等设备;而对于一些不易直接测量的元件,如电动机内部元件、隧道场景等数据,则通过相关设计单位、设备厂商以及铁路运营单位提供的图纸获得。为了使转辙机拆装实验严格按照实际拆装流程进行,通过对铁路运营单位及设备厂商的调研,参照国家作业标准制订了ZD6型电动转辙机的拆装流程和工艺。列车运行模式的仿真完全参照地铁运营公司及信号系统供货商提供的技术参数实现。
3.2 虚拟模型搭建
地铁场景及信号设备的三维模型搭建是本实验平台建设的重点和难点。虚拟实验平台开发流程如图4所示。首先根据获得的元件实物数据在3ds Max软件中实现元件的精确测绘,构建三维模型并进行材质渲染及优化;元件处理完成后,在3ds Max软件中进行组合拼接,并导出.FBX文件;再将文件导入Unity 3D软件中进行脚本编程,实现动作功能以及交互功能的设计,最后完成实验平台的系统建设。

图4 虚拟实验平台开发流程
(1)地铁虚拟场景搭建。为了满足虚拟平台需要,在Unity 3D平台下选择武汉某号线地铁真实数据,搭建一个三站两区间的实验场景,并增加列车模型。图5为场景中区间隧道、列车模型效果图。

图5 区间隧道、列车模型效果图
(2)地铁信号设备模型搭建。利用3ds Max软件实现信号机、道岔及转辙机、轨道电路等外部元件、设备的三维模型搭建。通过在Unity 3D仿真软件中利用C#语言编写脚本程序,实现信号机显示、道岔转换动作等三维动画效果。图6为ZD6型电动转辙机三维模型,该模型为ZD6型电动转辙机的内部结构。通过在Unity 3D仿真软件中利用C#语言编写脚本程序,实现转辙机内部工作的三维动作。
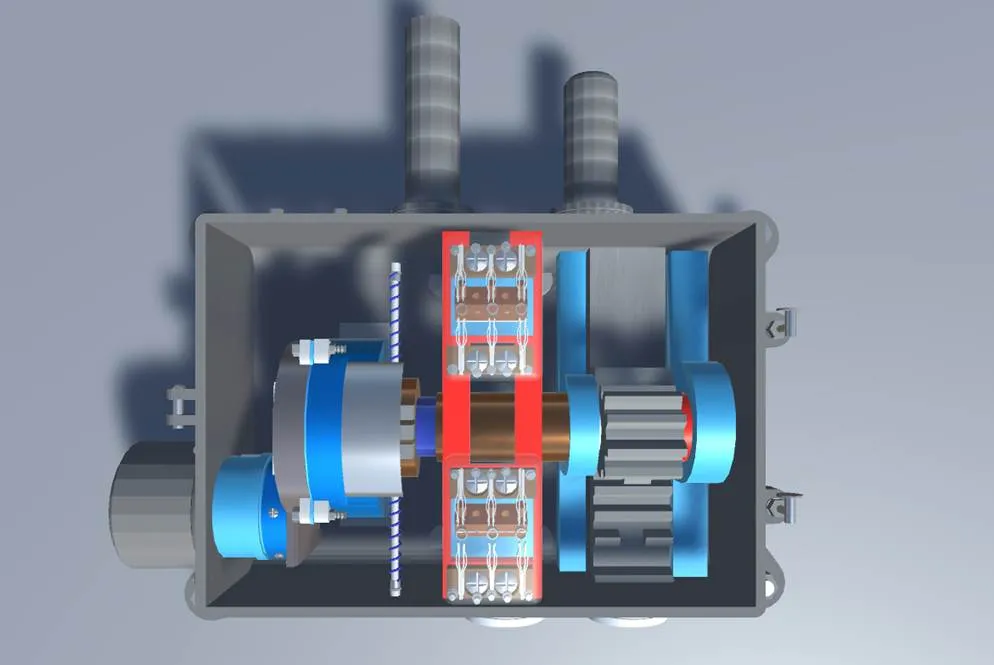
图6 ZD6型电动转辙机三维模型图
3.3 动画效果添加
将已经做好的.FBX文件导入Unity 3D软件中,通过Unity 3D软件自带的编辑器,利用C#语言编写脚本文件,实现信号机显示、道岔与转辙机的爆炸动画效果、道岔与转辙机联结动作、转辙机内部动作的动画演示。
3.3.1 元件查看与结构分析
元件的查看与机械结构分析主要是为了使学生对信号设备及其结构有直观的认识和了解。通过添加爆炸图并控制道岔及转辙机各个元件的Transform. renderer.enabled属性,可以实现元件的隐藏和显示,而分析及提示是通过设置语言文字提示实现的。当利用鼠标或手柄点击该元件模型时,该元件模型即高亮显示,在点击处显示提示文字说明并播放语音提示。
3.3.2 交互式拆装的实现
虚拟环境下实现转辙机的拆装必须符合实际拆装的顺序,因此要在交互式拆装的过程中添加逻辑顺序判断功能,使拆装过程具有交互性、动态性和逻辑控制性。系统拆装流程如图7所示。
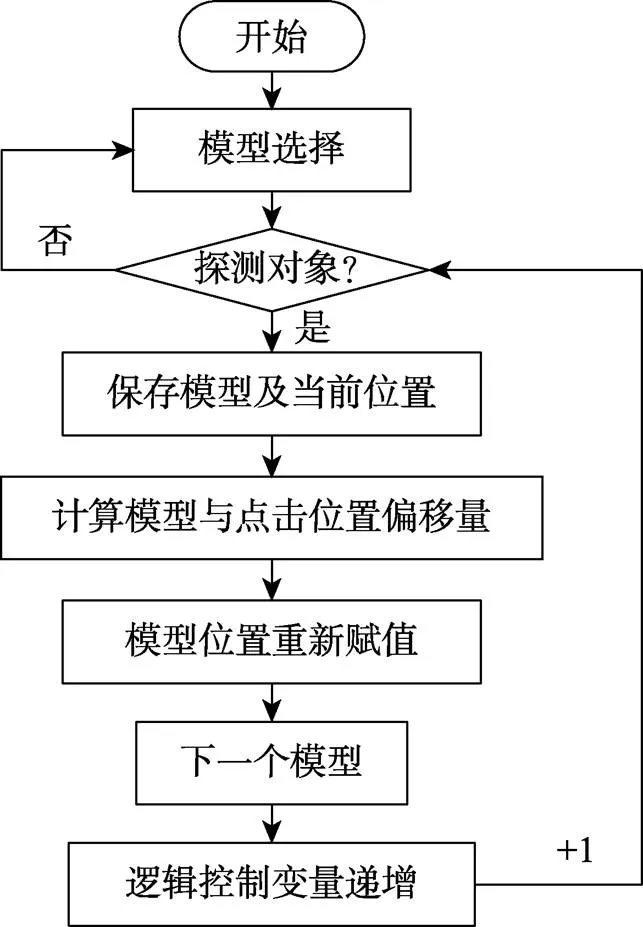
图7 系统拆装流程图
实验教学平台通过鼠标或手柄选择元件模型,并拖动该模型到按键松开的位置,实现设备元件的拆卸,并记录所拆卸元件模型的顺序和位置实现装配。
首先,记录所点击的元件模型,并将该拆卸模型名称及其初始位置数据分别保存在Transform组件类型的数组变量和数组变量中,其中数组变量的序号同时用于控制拆卸的逻辑顺序是否正确。
其次,获取拆卸模型时该模型的动态数据并添加拖动脚本文件,其脚本文件通过Ienumerator类型返回值,检测拖动过程中每一帧拖动和点击拖动的结果,实时计算该模型与点击拖动位置的偏移量,根据拖动位置对所拆卸模型位置进行动态赋值,从而实现拆卸功能。
最后,在装配时,根据数组变量的序号及所拆卸模型的初始位置,通过数组变量的MoveTowards( )函数实现与拆卸顺序相对应的元件装配。其中设置所有元件为刚体或碰撞体,使碰撞效果更加真实。
图8为ZD6型电动转辙机拆装效果图。
3.4 列车驾驶模式模拟
为了实现模拟列车驾驶,首先应实现列车的操控,因此需搭建列车驾驶室模型。列车驾驶室内按钮功能的实现选用Unity 3D内置的UGUI组件,为每一个可点击的按钮添加一个相符的Button物件。当点击Button物件触发点击事件时,调用OnClicked()函数,函数内封装该按钮相关功能的代码,从而在不同条件下完成不同的功能。

图8 ZD6型电动转辙机拆装效果图
为了控制列车速度,利用UGUI创建了一个速度提示面板,并通过C#语言编程实现列车运行速度计算,控制列车速度并将当前速度及容许速度输出到速度提示面板中。图9为列车驾驶效果图。

图9 列车驾驶效果图
4 实验平台教学效果
本虚拟仿真实验教学平台由本科学生在专业教师指导下完成,具有完全的知识产权。从14级本科学生开始,该平台已在本校轨道交通类专业的教学和实验中使用5年。表1为使用该实验教学平台之后学生成绩和到课率对比统计表。

表1 平台使用效果统计表
由表1可知,该平台的使用对实际的教学效果以及学生综合能力的提升有很大的促进作用,主要表 现为:
(1)学生的实践能力有了极大的提升,不再受制于实验设备及场地的限制。学生所学习的轨道交通信号基础设备理论可以和实际设备相结合,提高了学生的实践能力,为后续轨道交通专业课程的学习打下了坚实的基础。
(2)激发了学生的学习兴趣,学生到课率明显提高。学生基于该平台设计的智能交通项目曾获得第二届“交通·未来”大学生创意作品大赛三等奖2项。
5 结语
基于虚拟仿真平台的实验教学解决了传统实验教学过程中教学方法单一、不易进行设备拆装实验等问题,并具有成本低、损耗少且无危险等特点,是传统实验教学的拓展。地铁信号设备虚拟仿真实验使学生在虚拟地铁三维场景中快速理解和认知信号基础设备的技术参数、机械结构、动作原理和装配顺序,并了解列车的运行驾驶模式,提高了轨道交通信号基础设备实验教学的效率,取得了较好的实验教学效果。
[1] 郭进. 铁路信号基础设备[M]. 成都:西南交通大学出版社,2008: 24–39.
[2] 李茜. 转辙机电机故障分析与优化设计研究[D]. 天津:天津大学,2015: 1–3.
[3] 董昱. 区间信号与列车运行控制系统[M]. 北京:中国铁道出版社,2008: 38–47.
[4] 苗艺楠,申闫春. 基于Unity3D的交通事故虚拟再现系统研究[J]. 计算机仿真,2018, 35(12): 122–126.
[5] 赵琪,孙红,孙艳梅,等. 基础医学虚拟仿真实验教学平台构建研究[J]. 实验技术与管理,2016, 33(11): 135–138.
[6] 谭青,魏来,任志湘,等. 基于Simulink和VRML的球式自动平衡装置虚拟实验平台研究[J]. 振动与冲击,2016, 35(20): 1–8.
[7] TAKIYAMA K, SHINYA M. Development of a portable motor learning laboratory (PoMLab)[J]. Plos One, 2016, 11(6): e0157588.
[8] 赵博. 高铁车站出站信号机与停车标设置方案探讨[J]. 铁道工程学报,2018, 35(10): 69–72.
[9] 王安,罗世刚,焦美鹏. 转辙机转换力在轨监测方法研究[J]. 现代电子技术,2012, 35(7): 139–141.
[10] 张友鹏,祁欢,赵斌. 轨道电路分路态检测方法研究[J]. 铁道学报,2017, 39(1): 70–75.
[11] 孔德龙,王瑞峰,包超峰. NLMS算法在轨道电路信号解调中的应用[J]. 科学技术与工程,2014, 14(4): 61–65.
[12] 张雄,陈斌. 地铁B型车列车最高运行速度选择研究[J]. 铁道工程学报,2017, 34(10): 99–104.
Research on integrated simulation platform of subway signal equipment based on Unity 3D
KONG Delong, HU Wanxin
(School of Computer Science, South-central University For Nationalities, Wuhan 430074, China)
According to the structure and principle of subway signal basic equipment, a comprehensive simulation platform for experimental teaching based on virtual reality technology is established. By using Unity 3D, the 3D modeling of the mechanical structure, action principle and assembly sequence of subway signal basic equipment is realized and the running mode of subway train is simulated. By using this simulation platform, students can quickly understand and recognize the technical parameters, mechanical structure, action principle, assembly sequence and operation mode of the basic signal equipment. The teaching efficiency is improved and the experimental cost in the teaching and experiments of Rail Transit specialty is reduced.
subwaysignal equipment; driving mode; virtual reality; Unity 3D; experimental teaching
TP391.9
A
1002-4956(2019)09-0106-05
2019-02-27
国家自然科学基金资助项目(61803314)
孔德龙(1988—),男,甘肃临夏,硕士,讲师,主要研究方向为智能交通、轨道交通信号与控制。
E-mail: 891999579@qq.com, 2759194178@qq.com
10.16791/j.cnki.sjg.2019.09.027
猜你喜欢
铁道通信信号(2020年3期)2020-09-21 09:13:16
铁道通信信号(2020年1期)2020-09-21 08:55:00
铁道通信信号(2020年11期)2020-02-07 01:02:12
铁道通信信号(2020年10期)2020-02-07 01:01:02
铁道通信信号(2019年4期)2019-10-10 03:42:44
铁道通信信号(2019年3期)2019-04-25 03:00:40
铁道通信信号(2018年10期)2018-12-06 09:34:48
铁道通信信号(2018年10期)2018-12-06 09:34:48
铁道通信信号(2016年5期)2016-06-01 12:10:20
铁道通信信号(2016年6期)2016-06-01 12:10:20
