
基于LabVIEW的蔬菜精密播种监测系统设计*
2019-09-26 02:36:56陈彩蓉尹文庆
传感器与微系统 2019年10期
胡 飞, 刘 远, 陈彩蓉, 尹文庆, 李 骅, 浦 浩
(南京农业大学 工学院 江苏省智能化农业装备重点实验室,江苏 南京 210031)
0 引 言
播种是蔬菜生产的关键环节之一,播种的效率和质量是提升蔬菜产量和品质的关键因素。目前国内常用的排种检测方法有光电检测、图像检测、声波检测、重力监测等[1~3]。光电检测法设备安装简便、成本低廉,检测可靠,稳定性好,采用高强度光后受灰尘影响小,对环境要求低;图像分析法分析准确,准确率高,但成本较高,田间作业易受杂物干扰,难以保证正常工作;声波检测法检测范围大,不受作业时间影响,成本较低,但是田间作业噪音较大,影响接收器工作;重力检测法是根据重力原理进行工作的,常用于检测质量较大的物体。
光电检测法已成为非常广泛的播种监测手段[4]。传统光电检测法多采用普通光敏三极管、光敏二极管或光敏电阻作为检测元件[5,6]。光敏三极管灵敏度高、光电流大,但其频率特性易受负载影响,响应速度慢;红外光敏二极管线性好、响应速度快,但易受外界光照影响[7];光敏电阻灵敏度高,体积小、寿命长,但响应时间长。由于蔬菜种子大多数粒径较小,且形态多种多样,传统的监测方法通常难以满足蔬菜种子精密播种的实际需求,本文提出基于光纤传感器和LabVIEW的播种监测系统具有灵敏度高、响应速度快、抗干扰能力强等优点,有利于蔬菜播种过程的高效高质完成。
1 系统总体设计
蔬菜精密播种试验台主要采用无刷直流电机带动传送带转动模拟播种机在大田行走,在传送带上方安装排种器作为播种装置。播种作业时,蔬菜种子由排种器分离为单颗粒通过导种管落到传送带上。精密播种监测的参数主要有播种速度、播种间距、排种量等。监测系统总体结构如图1所示,其中,数据采集模块主要用于检测种子落下的光电信号和传送带行进、排种盘转动的速度信号;电机驱动模块主要包括电机驱动器和无刷直流电机,驱动器根据采集卡发送的脉冲信号来驱动传感带和排种盘电机转动;上位机系统主要包括计算机和LabVIEW上位机程序,通过人机交互界面将穴距、播速、每穴粒数等播种试验参数预置值发送到采集卡,并接收采集卡的数据进行处理、显示,实现蔬菜精密播种监测。

图1 蔬菜精密播种监测系统总体结构
2 监测系统硬件设计
2.1 硬件总体结构
硬件总体结构如图2所示。

图2 监测系统硬件结构
2.2 排种监测模块
排种监测模块主要用于检测排种器是否排出种子以及排出种子粒数,以供判断是否漏播、重播或机器故障。采用光强调制型光纤传感器,通过光束位移、遮挡、耦合以及其他物理方法使进入接收光纤的光强随外界信号变化而变化。本文使用遮光型调制,光强调制原理如图3所示。

图3 遮光型光纤传感器调制原理
设两根光纤均为阶跃折射率光纤,数值孔径为NA,入射光通过入射光纤进入后被透镜准直成半径为r的平行光束,无外界干扰时光路畅通,出射光纤接收到的光强值保持稳定;当有外界物体进入时,遮挡住光路,在线性近似条件下[8],可得到交叠面积与光纤纤芯面积之比α如式(1)所示,出射光纤光强值发生改变
(1)
式中α为交叠面积与光纤纤芯面积之比;δ为遮挡距离,mm;r为平行光束半径,mm。
光纤传感器工作时通过光纤头采集种子下落的光量变化值,经过信号转换电路将光信号转换为电信号。由于监测对象是蔬菜种子,每次下落引起的光信号变化极小,电信号变化也极其微弱,这样的信号不仅难以检测,而且易受干扰,因此,采用欧姆龙E3X-HD11放大器将信号放大来满足实际检测需求。
播种作业时,蔬菜种子由排种器分离为单颗粒后落入导种管,导种管通道采用ABS材料制作,高400 mm,横截面内表面长20 mm,宽11 mm,中间镂空,壁厚2 mm,在高度300 mm处安装光纤传感器,排种监测装置如图4所示。

图4 排种监测装置
2.3 播速监测与控制模块
根据播种试验要求采用增量型光电编码器作为测速传感器,具有分辨高、工作可靠、抗干扰能力强等优点。采用爱得利AM系列无刷直流电机和BL—104无刷直流电机驱动器作为动力源,该驱动器具有电机正反转控制、快速制动、转速显示等功能,提供过热保护、短路保护、过压保护等,具有操作简单、控制精确、安全性高、调速范围大等优点。
2.4 数据采集卡
采用NI公司生产的USB—6009数据采集卡,USB—6009采集卡提供了模拟I/O、数字I/O和一个32位计数器,该卡具有8路AI(14位,48 kS/s),2路AO(150 Hz),13路DIO。根据采集卡提供的端口,将模拟输入端口AI0,AI1,AI2分别连接光纤传感器、传送带编码器、排种盘编码器,模拟输出AO0,AO1连接电机驱动器,控制传送带和排种盘转动速度,数字输出DO0连接报警装置。
3 系统软件设计
系统软件设计是整个数据采集与处理系统的重要组成部分。软件系统主要由主程序、播种信息采集与处理、电机驱动与控制、人机交互、播种性能分析等模块组成[9]。
3.1 系统主程序设计
多线程是LabVIEW编程的一大特色,多线程允许多个并行的数据连线、程序代码、循环、VI子程序等同时运行,互不干扰,此模式为编程带来很大方便[10]。本文利用LabVIEW多线程的特点,主程序设计了三个并行的线程,分别用来监测光纤传感器、传送带测速编码器和排种盘测速编码器接入采集卡的端口电压值,依据电压值变化情况来启动各个子模块程序[11]。主程序流程如图5所示。
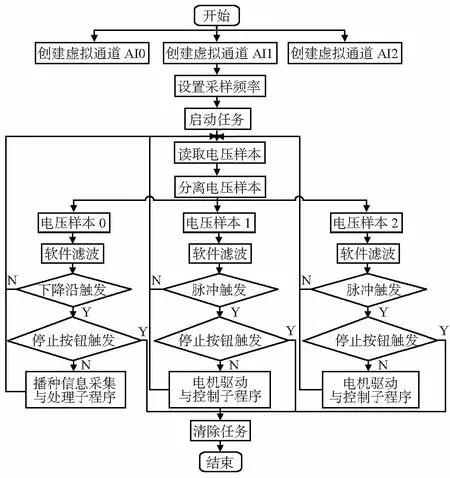
图5 主程序流程
系统启动后,首先创建3个虚拟通道AI0,AI1和AI2,设置虚拟通道电压范围为-5~5 V,用来检测3只传感器接入端口电压,然后设置采样时钟频率为10 kHz,每通道采样数为1 000,默认时钟源为内部板载时钟。参数设置完毕后,采样任务即创建成功,电压信号采样方式为连续采样,结束按钮未启动时,采样任务持续进行,结束按钮启动时,采样任务终止,所有任务全部清除。
3.2 播种信息采集与处理模块
3.2.1 粒数检测子程序
粒数采集子程序是根据光纤传感器采集到的电压信号经过信号放大器来进行识别和判断种子下落情况。主程序实时读取AI0端口电压,当下降沿到来时,程序启动。子程序主要分析电压变化情况,根据电压变化判断种子下落情况,对下落进行统计,得到每穴种子粒数。采用触发与门限函数分析电压变化趋势,粒数检测子程序如图6所示。

图6 粒数检测子程序
3.2.2 播速检测子程序
检测传送带转速时,将一橡胶轮与传送带表面相接触,橡胶轮的轴与编码器连接,传动带运动时带动橡胶轮转动,进而带动编码器旋转,编码器通过计量脉冲信号得到轴的转速。传送带速度为
(2)
式中v为传送带线速度,m/s;R为传送带测速橡胶轮半径,m。本文设定测速检测时间Tc为1 s,编码器分辨率P为400,传送带测速橡胶轮半径为0.03 m,则程序得到1 s内编码器脉冲计数值m2后即可算得橡胶轮转速v。播速检测子程序如图7所示。

图7 播速检测子程序
3.3 电机驱动与控制模块
电机驱动子程序主要有2个功能,一个是控制传送带驱动电机模拟播种机械田间作业,另一个是通过控制排种器的电机转动来控制排种盘的转动,从而保证排种速度与传送带转速匹配,使得穴距满足要求。
3.4 人机交互模块
人机交互界面如图8所示,主要分为蔬菜信息和监测系统两部分,蔬菜信息部分主要根据不同蔬菜品种显示种子的物理参数和蔬菜实物图,监测系统主要是根据蔬菜种类设置播种试验参数并实时获取各项监测数据。
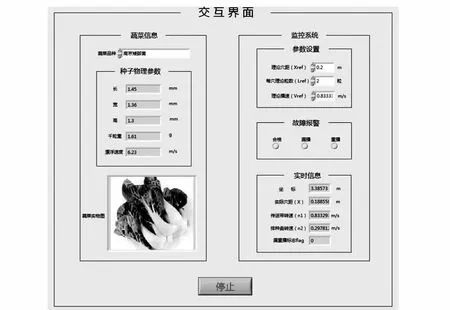
图8 人机交互界面
4 系统试验与分析
采用不同粒径大小的3种蔬菜种子,南京矮脚黄、四季萝卜、红苋菜种子各300粒,采用单粒播种方式,在距传感器300 mm高度处进行排种,60 s内播完。重复10次,记录检测到种子数量,计算检测准确率。试验结果如表1所示。

表1 不同粒径种子排种监测试验结果
由表1计算得到不同粒径大小播种检测正确率平均值。不同粒径大小的种子监测效果有所不同,粒径在1 mm以上的南京矮脚黄和四季萝卜种子监测效果较好,分别达到97.37 %和98.93 %,粒径在1 mm以下的红苋菜种子监测效果略差,达到86.63 %,该系统能够满足蔬菜精密播种监测的需求。
5 结束语
本系统充分利用了光纤传感器灵敏度高、响应速度快、抗干扰能力强等优点和LabVIEW强大的功能,设计了一种蔬菜精密播种监测系统,通过光纤传感器检测种子下落的脉冲信号,对播种过程播种速度、播种间距、排种量等参数进行监测。试验结果表明:系统对粒径1 mm以上的单粒种子排种监测准确率达97.37 %以上,系统监测效果良好,能够满足蔬菜精密播种监测的实际需求。
猜你喜欢
高中数理化(2024年8期)2024-04-24 16:58:14
中国测试(2022年2期)2022-03-19 09:57:30
中学生数理化·高一版(2021年1期)2021-03-19 08:30:02
制造技术与机床(2017年8期)2017-11-27 02:10:05
网络安全与数据管理(2016年4期)2017-01-10 03:44:42
电子器件(2015年5期)2015-12-29 08:43:12
中国科技纵横(2015年2期)2015-11-05 02:30:11
科学中国人(2014年16期)2014-11-20 02:50:00
中国新技术新产品(2014年3期)2014-03-24 07:39:08
物理通报(2012年1期)2012-03-20 03:42:16
