汽车APP远程控制测试方法研究
2019-09-26 07:40:16李治民张东波林杰郭天娇李俊儒
汽车文摘 2019年10期
李治民 张东波 林杰 郭天娇 李俊儒
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词:远程控制 硬件在环 智能网联汽车
缩略语
GPRS General Packet Radio Service
HIL Hardware In the Loop
ICV Intelligent and Connected Vehicle
T-BOX Telematics BOX
BCM Body Control Module
DCU Door Control Unit
PEPS Passive Entry Passive Start
HCU Hybrid Control Unit
EMS Engine Management System
TSP Telematics Service Provider
PWM Pulse Width Modulation
1 前言
随着科学技术的进步,汽车电动化和智能化越来越受到人们关注[1]。早期具备远程控制的车辆是基于GPRS通讯开发的[2],控制和监测策略[3]较为简单。近些年,随着智能手机和4G技术的大力发展,各大整车厂更加关注手机与汽车的交互使用[4]。武汉理工大学研发了一款具备远程控制的汽车,可实时监测和遥控车辆[5]。
本文针对汽车APP远程控制系统的测试需求,提出了一种基于硬件在环(HIL)技术的半实物仿真测试系统[6],可满足多种复杂场景下的测试需求。该方案已应用于多款红旗车型远程控制系统的测试工作,具备移植性强、测试覆盖度广、效率高等特点[7-8]。
2 测试系统总体方案
本测试方案采用基于硬件在环技术的整车HIL测试环境。相比于真实车辆,HIL测试设备不仅可以进行正向开发测试,还可以模拟各种故障工况和极端工况,测试的覆盖度更广、颗粒度更加精细[9],适用于汽车APP远程控制系统的前期开发以及后期的问题排查[10]。
该测试系统可以进行手机远程控制APP、车载远程通讯终端(T-BOX)、车身控制器(BCM)、车门控制器(DCU)、智能进入和启动控制器(PEPS)、空调控制器(AC)、整车控制器(HCU)等节点进行功能和诊断方面的系统集成测试。同时该系统也可配置为单节点测试。
该测试系统分为硬件系统和软件系统两部分。硬件系统集成了控制器和车灯、门锁、空调等真实负载,以及电源、实时处理器、信号调理板卡、CAN/LIN板卡等设备;软件系统包括汽车模型、I/O模型、上位机系统、自动化测试系统等部分。该测试系统可实时仿真和监测各个控制器的网络信号和电气信号以及各个负载的状态变化,以此形成一套完整的汽车APP远程控制测试系统,如图1所示。

图1 汽车APP远程控制测试系统
3 测试系统硬件方案
汽车APP远程控制测试系统的硬件设备由电器负载台架和电源、实时操作系统机柜组成,集成了待测控制器、传感器和执行器,可进行远程控制系统的半实物仿真测试。
3.1 电源系统
测试系统需要为各个控制器进行供电,模拟真实车辆的使用环境。电源系统采用大功率可编程电源供电,可模拟车辆KL15、KL30、KL87等供电状态;同时还可以实时测量设备的功耗和电流使用情况,如图2所示。

图2 电源系统
电源系统可在线编程调节电压,可实现多路不同电压的输出、跌落、过压等复杂工况,最大支持30 A电流输出,同时具备电流保护功能。
3.2 实时处理器
测试系统配置了NI公司PXIe-8135 RT型号的实时处理器,可实现汽车模型和上位机I/O模型的仿真控制。例如,远程启动功能涉及到EMS控制器的相关逻辑就是实时仿真模型实现的,解决了无法集成真实发动机的难题。同时,实时处理器可配合虚拟仪器软件共同使用,实现上位机界面实时控制和监控,极大地提高了测试效率。
3.3 信号调理系统
信号调理系统实现了测试设备对电控系统、传感器和执行器等不同电气元件电气信号的预处理功能,包括:数字信号输入/输出调理、模拟信号输入/输出调理、电压转电流、占空比(PWM)信号输入/输出调理。测试系统配置了丰富的信号调理资源,不仅能实时监测每个控制器输入输出引脚的电气属性状态,同时在实时处理器的配合使用下还可以仿真发生各种时序逻辑的电气信号,形成一套仿真+采集的完整闭环测试系统。
3.4 虚拟控制器系统
测试系统配置了2块CAN通讯板卡,在车辆模型的配合使用下实现了不同节点控制器的虚拟仿真;同时可以自由切换真实节点与仿真节点的在线状态,有效地增加了测试场景数量,提升了测试深度和覆盖度。
4 远控系统测试测试方案
4.1 远控系统测试需求分析
汽车APP远程控制系统的逻辑功能一般包括:车况状态查询、故障信息查询、车辆模式定义、远程启动、远程下电(电动车配置该功能)、远程解锁、远程闭锁、远程寻车、远程天窗控制、远程车窗控制、远程车灯控制、远程空调控制、远程座椅加热控制等功能。本文仅以远程寻车功能为例进行测试需求分析。
用户可以通过客户端APP进行远程寻找车辆,触发车辆闪烁转向灯4次,提示车辆位置。用户操作手机APP界面,通过4G网络发送远程寻车指令和验证密钥至服务器。验证成功后,服务器下发远程寻车指令给车载T-BOX。T-BOX与PEPS进行防盗验证,确保该操作是否为合法操作。防盗验证通过后,T-BOX发送远程寻车命令至BCM,BCM驱动转向灯闪烁4次;同时,T-BOX上传寻车状态至服务器,用户可通过手机APP查看远程寻车功能是否被正确触发。远程寻车流程如图3所示。
4.2 远程控制系统测试用例
通过分析远程寻车功能的流程,可采用流程图分析法编写测试用例。流程图分析法是通过流程图描述功能逻辑来明确功能的输入条件和输出结果,将复杂的逻辑功能用流程图的方式进行描述,分析进入条件、进入动作、退出条件、退出动作等元素,以此保证测试覆盖度。远程寻车功能的流程图分析法如图4所示。根据流程图中各节点交互过程,部分测试用例如表1所示。不同车型下,TSP、T-BOX、PEPS、BCM的控制策略是不一样的,各个控制器的失效条件也存在差异。对于确定的车型来说,测试用例需要对各个控制器的失效条件进一步分解。

图3 远程寻车流程

图4 远程寻车流程图分析法

表1 远程寻车测试用例
5 测试验证
通过分析汽车APP远程控制系统的各项功能逻辑,测试人员完成测试用例的开发。在整车HIL仿真环境下,测试人员验证APP远程控制系统各个节点的工作情况。
通过操作手机APP界面内的不同功能,并且实时监测电器负载台架、各个控制器的电气状态以及CAN网络报文等信号,测试人员可以对不同场景下的远程控制系统进行评价,图5为红旗车型手机APP远程控制界面。

图5 红旗车型APP控制界面
在本测试环境下,测试人员不仅可以完成各项远程控制功能的正向测试,同时也可以模拟各种故障场景和极限工况的发生,有效地提高了测试覆盖度,图6为电器负载台架。例如,测试远程寻车功能时,测试人员可以通过测试系统制造T-BOX与PEPS校验不成功或者BCM未正确驱动转向灯闪烁等故障场景,来评价远程控制系统设计的正确性和合理性。相比于实车测试,本测试系统的测试覆盖度和测试深度得到了显著提高,如表2所示。
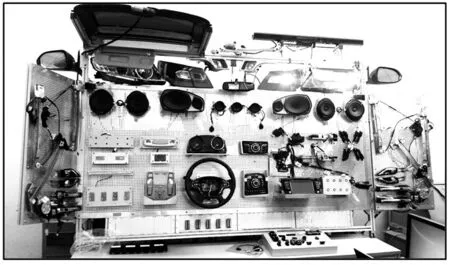
图6 电器负载台架

表2 测试用例对比
6 总结
本文研究了红旗车型APP远程控制系统的测试方法和开发过程。本测试系统已完成多款红旗车型远程控制系统的测试任务,具备良好的通用型和可移植性。相比于实车测试环境,该系统可实现正向功能测试、极限工况测试以及故障场景测试等多种维度、多种场景下的评价方法,有效地提升了测试覆盖度和测试深度,显著地缩短了产品的开发验证周期。
猜你喜欢
科学技术创新(2022年30期)2022-10-21 14:01:24
软件导刊(2022年9期)2022-09-22 05:59:54
农业与技术(2021年23期)2021-12-14 09:03:32
铁道通信信号(2020年6期)2020-09-21 09:23:22
原子与分子物理学报(2020年5期)2020-03-17 06:59:18
传感器与微系统(2018年7期)2018-08-29 00:44:18
山东化工(2018年20期)2018-04-02 16:30:53
电脑知识与技术(2017年31期)2017-12-11 13:54:11
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01 02:54:29
铁道警察学院学报(2012年6期)2012-08-15 00:55:22