
Superpave旋转压实仪的控制设计及稳压控制策略研究
2019-09-25 13:22罗家浩邵秋萍徐逸飞卢正新孙旭杰
数字技术与应用 2019年6期
关键词:模糊控制
罗家浩 邵秋萍 徐逸飞 卢正新 孙旭杰

摘要:论文针对Superpave旋转压实仪设备,进行了控制系统的开发与设计。为了更好地实现旋转压实仪的稳压控制,论文主要介绍了模糊控制的方法。通过研究分析,可知模糊控制的响应速度较快并且精度更高。
关键词:旋转压实仪;压力控制;Superpave;模糊控制
中图分类号:TH112 文献标识码:A 文章编号:1007-9416(2019)06-0012-02
0 引言
为了能在实验室中模拟沥青路面所受作用力的实际情况,通过结合SHRP研究成果,诞生了Superpave旋转压实仪(Superpave Gyratory Compactor,SGC),使用这种设备成型出来的试件符合实际工程中的沥青混合料成型方式。通常情况下,SGC一般由旋摆机构和压实机构两部分组成。在压实的过程中,旋摆机构做匀速运动,较为简单;压实机构的速度需要根据实际情况发生变化,是一种非线性的复杂系统。
1 旋转压实仪的控制方案
根据旋转压实仪的控制要求可知,该设备的控制对象应涵盖旋摆机构的搓揉运动、压力信号的采集、压力机构的升降运动、键盘输入、角度检测以及显示部分。根据这些内容,可以将控制系统分为控制中心部分、信息输入部分、信息输出部分和信息反馈部分。
控制中心部分是整个控制系统的核心,主要功能是对信息输入部分的信号进行处理,并将控制信号输出到信号输出部分;信息输入部分主要由压力输入和键盘输入两个独立部分组成;信息输出部分主要由显示部分、驱动信号输出部分、蜂鸣器部分和提示灯组成;信息反馈部分主要由传感器组成。
对于旋转压实仪的控制系统,最重要的就是实现利用压力传感器对压力的实时测量、监测和反馈控制。
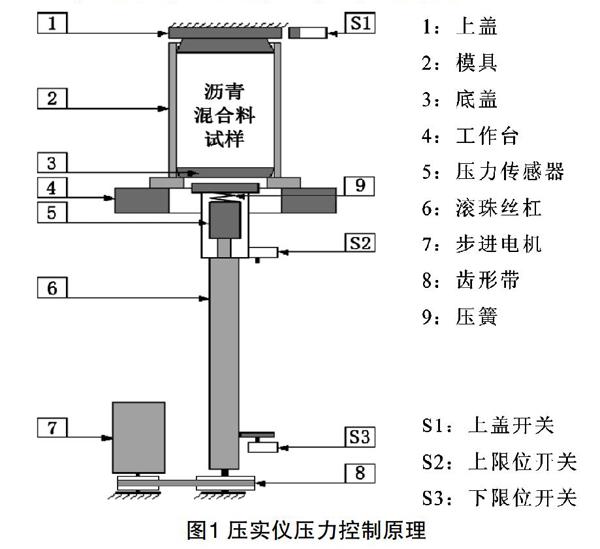
2 压实仪压力控制原理
在旋转压实仪设备运行的过程中,压力的产生是一个复杂的过程。如图1所示,步进电机7在接收到控制中心的脉冲信号之后,产生角位移。根据脉冲信号的时间变化,齿形带8的速度也将发生改变。齿形带产生的圆周速度会经过滚珠丝杠6转变为直线位移变化。最后,由变化的模具高度对试样的产生压力进行压实。为了使速度变化更加趋于平稳,可以在滚珠丝杠末端增加压簧器件9。
在压实过程中,试样所受到的压力主要取决于步进电机的速度。步进电机的速度是由控制中心发出的脉冲信号频率决定的,脉冲信号频率越高,则压实速度越快,试样所受到的压力也就越大。当压力过大时,电机应当停转或者反转从而减小压力。但是,由于电机具有惯性,无法完成立即停止的操作。
3 压实仪稳压控制策略
在旋转压实仪的运行中,压力大小不仅仅取决于驱动电机的输出,还与旋摆角有关。在設备运行初期,旋摆角发生变化较大,压实力的大小也会受到影响,我们可以根据实验过程中试样高度的变化值来判断压力的波动大小。
在设备运行的前10圈中,压力变化幅度较大;在设备运行的前30圈中,压力变化幅度仍然较高。因此在设备运行前期,旋转压实仪所做的压实运动是无效的,并不符合Superpave沥青路面技术规范,所以必须控制好设备前30圈中的压力电机的运动幅度。
在有丰富的压实仪控制经验的条件下,可以采用模糊控制的方法使压实仪的动态控制性能更佳,响应速度也更加快速。在旋转压实仪中,为了达到一定的控制精度并且防止控制算法过于复杂,我们选择二维模糊控制器。
由于旋转压实仪压实的压强要求为600±10 kPa,所以可知系统误差论域应该为-10~+10。将误差E和误差变化率均分为8个等级,则系统的模糊词集为负大(NB)、负中(NM)、负小(NS)、负零(NZ)、正零(PZ)、正小(PS)、正中(PM)、正大(PB)。旋转压实仪的输入为脉冲信号的频率f,输出量为压强P,建立模糊控制表如表1所示。
根据模糊控制表则可以很好的预判发生压力的变化,从而实现对压力的稳定控制。
4 结语
Superpave旋转压实仪最重要的控制对象就是对压力进行控制,所以只要压力能够稳定在600kPa,试样成型之后所得到的参数就能更加符合实际。虽然目前旋转压实仪最广泛使用的控制方法仍然是PID控制,但更加先进的控制方法则是模糊控制。一般情况下,采用模糊控制的压实仪实时控制系统压力更加稳定,响应速度也更快。
参考文献
[1] 陈祥林,郭秀华.PID控制器在沥青混合料压实仪中的应用[J].路基工程,2009(05):58-59.
[2] 孟令伟,钱静.基于ADAMS的空间旋摆机构运动分析与仿真[J].机械设计与制造,2007(06):72-74.
[3] 尤丽华,吴鸿雁,王灯照.旋转压实仪参数自整定数字PID控制器的设计[J].计算机工程与设计,2009,30(23):5524-5526.
[4] 卢泽生.控制理论及其应用2版[M].北京:高等教育出版社,2016:5.
Control Design of Superpave Gyratory Compactor and Study of Pressure Stabilization Control Strategy
LUO Jia-hao,SHAO Qiu-ping,XU Yi-fei,LU Zheng-xin,SUN Xu-jie
(Nanjing Institute of Technology,Nanjing Jiangsu 211167)
Abstract:The control system of Superpave gyratory compactor is developed and designed in this paper. In order to realize the stabilization control of gyratory compactor better, this paper mainly introduces the method of fuzzy control. Through research and analysis, it can be seen that the response speed of the fuzzy control is faster and the precision is higher.
Key words:gyratory compactor; pressure control; Superpave; fuzzy control
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电源技术(2017年1期)2017-03-20
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22
